基于无人机视野的旋转目标检测方法及装置与流程
本发明涉及目标检测,尤其涉及基于无人机视野的旋转目标检测方法及装置。
背景技术:
1、随着无人机技术的飞速发展,无人机在监控、侦查、农业监测、灾害评估等领域的应用日益广泛。在这些应用场景中,无人机搭载的高清摄像头能够捕获高分辨率、大尺寸的图像数据,为后续的目标检测与分析提供了丰富的信息源。
2、然而,传统的深度学习目标检测网络在处理这类高分辨率图像时面临诸多挑战。一方面,高分辨率图像需要更高的计算资源和存储空间,可能导致检测效率低下;另一方面,当无人机在高空或远距离对目标进行成像时,目标通常以俯视图形式呈现,且可能因排列密集、非水平或垂直而增加检测难度。传统的矩形框检测方法在这种情况下往往会出现框体重叠、不贴合目标轮廓的问题,影响检测的准确性和实用性。
技术实现思路
1、有鉴于此,本发明实施例提供了基于无人机视野的旋转目标检测方法及装置,用以解决传统目标检测方法对高分辨图像检测效率较低,且检测准确性不高的问题。
2、本发明采用的技术方案是:
3、第一方面,本发明提供了一种基于无人机视野的旋转目标检测方法,包括:
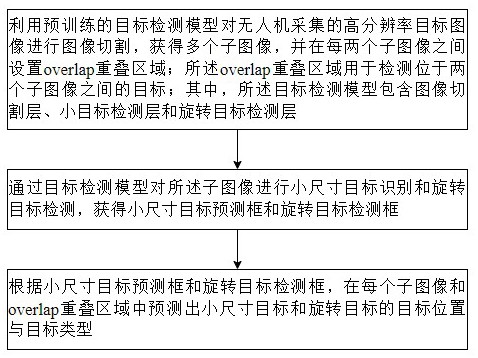
4、利用预训练的目标检测模型对无人机采集的高分辨率目标图像进行图像切割,获得多个子图像,并在每两个子图像之间设置overlap重叠区域;所述overlap重叠区域用于检测位于两个子图像之间的目标;其中,所述目标检测模型包含图像切割层、小目标检测层和旋转目标检测层;
5、通过目标检测模型对所述子图像进行小尺寸目标识别和旋转目标检测,获得小尺寸目标预测框和旋转目标检测框;
6、根据小尺寸目标预测框和旋转目标检测框,在每个子图像和overlap重叠区域中预测出小尺寸目标和旋转目标的目标位置与目标类型。
7、进一步地,所述目标检测模型的预训练过程包括:
8、加载预设的训练数据集,并基于训练数据集中的图像尺寸设置目标检测的候选框尺寸;
9、对yolov5模型进行定制化修改,在yolov5模型中增加图像切割层、小目标检测层和旋转目标检测层,并基于预设训练参数初始化定制化修改后的yolov5模型的网络结构;
10、通过预设的训练数据集对定制化修改后的yolov5模型进行目标检测训练,并利用损失函数对模型进行优化,在损失函数收敛后输出预训练的目标检测模型。
11、进一步地,所述对yolov5模型进行定制化修改,在yolov5模型中增加图像切割层、小目标检测层和旋转目标检测层,包括:
12、根据图像切割逻辑在yolov5模型的detect.py脚本中增加图像切割代码,形成图像切割层;所述yolov5模型包括输入端、主干网络、颈部结构和头部结构;所述颈部结构中包括用于池化的spp结构和用于多层级特征融合的pan结构;所述头部结构中包含最终检测层pi;
13、对yolov5模型的颈部结构进行优化,在主干网络的第2层经过4倍下采样处,增加一个小目标检测层,同时将颈部结构修改为四尺度融合,经过pan结构与8倍下采样处、16倍下采样处和32倍下采样处产生的特征图进行特征融合;
14、基于旋转目标检测算法,在yolov5模型头部结构的预测通道中新增采用参数θ表示的旋转角度预测通道,将头部结构中最终检测层pi的通道维度由3×(c+5)修改为3×(c+6),使得最终检测层pi中每个锚框多出一个预测通道,用于回归参数θ,形成可生成旋转目标检测框的旋转目标检测层,得到定制化修改的yolov5模型;c表示目标的类别。
15、第二方面,本发明提供一种基于无人机视野的旋转目标检测装置,包括:
16、图像切割模块,用于利用预训练的目标检测模型对无人机采集的高分辨率目标图像进行图像切割,获得多个子图像,并在每两个子图像之间设置overlap重叠区域;所述overlap重叠区域用于检测位于两个子图像之间的目标;其中,所述目标检测模型包含图像切割层、小目标检测层和旋转目标检测层;
17、目标检测识别模块,用于通过目标检测模型对所述子图像进行小尺寸目标识别和旋转目标检测,获得小尺寸目标预测框和旋转目标检测框;
18、目标标记模块,用于根据小尺寸目标预测框和旋转目标检测框,在每个子图像和overlap重叠区域中预测出小尺寸目标和旋转目标的目标位置与目标类型。
19、综上所述,本发明的有益效果如下:
20、通过本发明提供的一种基于无人机视野的旋转目标检测方法,方法通过利用预训练的目标检测模型对无人机采集的高分辨率目标图像进行图像切割,获得多个子图像,并在每两个子图像之间设置检测位于两个子图像之间目标的overlap重叠区域,有效降低了高分辨率图像的处理难度,同时通过overlap重叠区域保证了图像检测精度。然后通过目标检测模型小目标检测层和旋转目标检测层对具有目标检测标签格式的子图像进行小尺寸目标识别和旋转目标检测,并基于检测出的小尺寸目标预测框和旋转目标检测框在每个子图像和overlap重叠区域中预测出小尺寸目标和旋转目标的目标位置与目标类型,能够更准确地识别并快速地框定小尺寸目标和旋转目标,解决了传统矩形框检测方法的局限性,提高了检测的鲁棒性和实用性。
技术特征:
1.一种基于无人机视野的旋转目标检测方法,其特征在于,包括:
2.根据权利要求1所述的基于无人机视野的旋转目标检测方法,其特征在于,所述目标检测模型的预训练过程包括:
3.根据权利要求2所述的基于无人机视野的旋转目标检测方法,其特征在于,所述对yolov5模型进行定制化修改,在yolov5模型中增加图像切割层、小目标检测层和旋转目标检测层,包括:
4.一种基于无人机视野的旋转目标检测装置,其特征在于,包括:
技术总结
本发明提供了基于无人机视野的旋转目标检测方法及装置,属于目标检测技术领域。方法利用预训练的目标检测模型对无人机采集的高分辨率目标图像进行图像切割,获得多个子图像,并在每两个子图像之间设置用于检测位于两个子图像之间的目标的overlap重叠区域;然后通过目标检测模型对所述子图像进行小尺寸目标识别和旋转目标检测,获得小尺寸目标预测框和旋转目标检测框;最后根据小尺寸目标预测框和旋转目标检测框,在每个子图像和overlap重叠区域中预测出小尺寸目标和旋转目标的目标位置与目标类型。本发明能够更准确地识别并快速地框定小尺寸目标和旋转目标,解决了传统矩形框检测方法的局限性,提高了检测的鲁棒性和实用性。
技术研发人员:陈熹,魏明强,莫然
受保护的技术使用者:成都国恒空间技术工程股份有限公司
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!