基于动态卷积的点云实例分割模型及SLAM地图构建方法与流程
本发明涉及标记场景内容,具体涉及一种基于动态卷积的点云实例分割模型及slam地图构建方法。
背景技术:
1、传统的激光雷达slam算法在动态环境中进行地图构建时,常常面临一系列挑战,包括精度不足、鲁棒性差以及在复杂环境下的表现不佳。这些局限性使得在快速变化的场景中,激光雷达slam系统的可靠性受到影响。尤其是在存在多个不同形状大小的动态物体的动态环境中,容易出现静态物体的误判和错误去除,导致定位和建图的精度降低,降低了激光雷达slam系统在复杂、快速变化的动态环境中的鲁棒性和可靠性。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种基于动态卷积的点云实例分割模型及slam地图构建方法,能够提高复杂环境下动态物体的识别精度,进而确保激光雷达slam系统在复杂、快速变化的动态环境中的鲁棒性和可靠性。具体技术方案如下:
2、第一方面,提供了一种基于动态卷积的点云实例分割模型,在第一方面的第一种可实现方式中,包括:
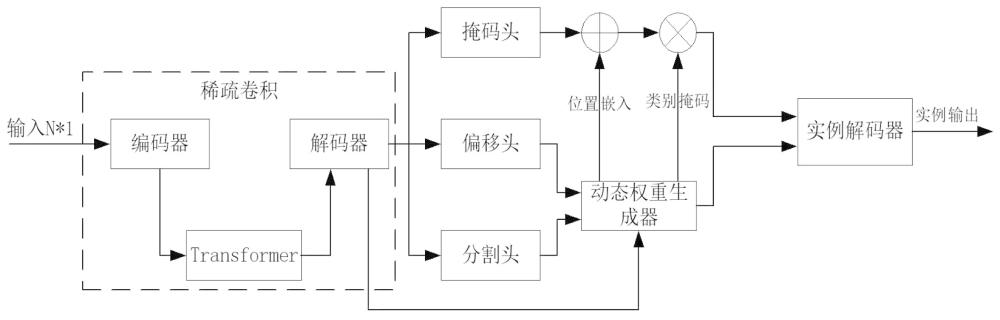
3、稀疏卷积网络,配置为获取点云数据,并从点云数据中提取出全局特征;
4、掩码头、偏移头和分割头,分别配置为从所述稀疏卷积提取到的全局特征中分离出掩码特征、质心偏移特征和语义特征;
5、动态权重生成器,配置为根据所述偏移头和分割头分离出的质心偏移特征、语义特征及所述全局特征,确定位置信息嵌入、类别掩码和实例权重;
6、实例解码器,配置为根据实例权重,以及结合了掩码特征、类别掩码和位置信息嵌入的实例特征,生成所述点云数据对应的动态目标掩码。
7、结合第一方面的第一种可实现方式,在第一方面的第二种可实现方式中,所述稀疏卷积网络为子流形稀疏卷积网络。
8、结合第一方面的第一种可实现方式,在第一方面的第三种可实现方式中,所述稀疏卷积网络的编码器与解码器之间配置有轻量级transformer块。
9、结合第一方面的第一种可实现方式,在第一方面的第四种可实现方式中,所述偏移头通过将点云中的点移动到对应实例的质心,得到所述质心偏移特征对几何质心相近且类别预测结果相同的质点进行分簇。
10、结合第一方面的第一种可实现方式,在第一方面的第五种可实现方式中,所述动态权重生成器根据质心偏移特征对几何质心相近且类别预测结果相同的质点进行分簇。
11、结合第一方面的第一种可实现方式,在第一方面的第六种可实现方式中,通过对簇内的同质点进行分组,利用子网络对大规模上下文进行聚合,生成实例感知的实例权重。
12、第二方面,提供了一种基于动态卷积的slam地图构建方法,在第二方面的第一种可实现方式中,包括:
13、构建所述点云实例分割模型,并通过预先构建的训练集对所述点云实例分割模型进行训练;
14、实时获取待构建环境的点云图像数据,并通过训练好的云实例分割模型生成所述点云图像数据对应的动态目标掩码;
15、通过所述动态目标掩码分离点云图像数据中的动态点云和静态点云;
16、基于分离出的静态点云构建静态地图,并基于分离出的动态点云构建动态地图,并将所述动态地图和静态地图对齐结合形成全局地图。
17、结合第二方面的第一种可实现方式,在第二方面的第二种可实现方式中,获取所述点云图像数据包括:
18、获取激光雷达采集到的环境扫描数据,并对环境扫描数据进行去噪声处理、地面分割处理和/或聚类分割处理,得到所述点云图像数据。
19、结合第二方面的第一种可实现方式,在第二方面的第三种可实现方式中,基于分离出的静态点云构建静态地图,包括:
20、对所述静态点云进行特征提取,获取当前帧对应的边特征点和平面特征点;
21、分别根据所述边特征点和平面特征点构建局部边地图和局部平面地图,并通过局部边地图和局部平面地图构建起当前帧对应的局部地图;
22、基于提取到的边特征点、平面特征点和构建的局部地图进行里程计估计确定关键帧,并根据关键帧对应的静态点云构建静态地图。
23、结合第二方面的第三种可实现方式,在第二方面的第四种可实现方式中,基于边特征点、平面特征点和局部地图进行里程计估计,包括:
24、从所述局部边地图中搜索出最近的边特征点,并针对每个边特征点在局部地图中的坐标,选取出两个最近的边特征点构建起点到边的残差方程;
25、从所述局部平面地图中选取出三个相距最近的平面特征点,以此构建起点到面的残差方程;
26、基于点到边的残差方程,以及点到面的残差方程,确定当前帧到局部地图的变换关系,并根据变换关系确定当前帧是否为关键帧。
27、有益效果:采用本发明的基于动态卷积的点云实例分割模型及slam地图构建方法,通过设置的动态权重生成器为不同形状和大小的实例配置相应的实例权重,从而生成可以精确地描述动态物体的轮廓的动态目标掩码,以针对多样化的动态物体进行精确分割,减少动态物体对静态环境建图的干扰,从而确保定位与建图的准确性,进而提高激光雷达slam系统在复杂、快速变化的动态环境中的鲁棒性和可靠性。
技术特征:
1.一种基于动态卷积的点云实例分割模型,其特征在于,包括:
2.根据权利要求1所述的点云实例分割模型,其特征在于,所述稀疏卷积网络为子流形稀疏卷积网络。
3.根据权利要求1所述的点云实例分割模型,其特征在于,所述稀疏卷积网络的编码器与解码器之间配置有轻量级transformer块。
4.根据权利要求1所述的点云实例分割模型,其特征在于,所述偏移头通过将点云中的点移动到对应实例的质心,得到所述质心偏移特征。
5.根据权利要求1所述的点云实例分割模型,其特征在于,所述动态权重生成器根据质心偏移特征对几何质心相近且类别预测结果相同的质点进行分簇。
6.根据权利要求5所述的点云实例分割模型,其特征在于,通过对簇内的同质点进行分组,利用子网络对大规模上下文进行聚合,生成实例感知的实例权重。
7.一种基于动态卷积的slam地图构建方法,其特征在于,包括:
8.根据权利要求7所述的slam地图构建方法,其特征在于,获取所述点云图像数据包括:
9.根据权利要求7所述的slam地图构建方法,其特征在于,基于分离出的静态点云构建静态地图,包括:
10.根据权利要求9所述的slam地图构建方法,其特征在于,基于边特征点、平面特征点和局部地图进行里程计估计,包括:
技术总结
本发明公开了一种基于动态卷积的点云实例分割模型及SLAM地图构建方法,包括稀疏卷积网络、掩码头、偏移头、分割头、动态权重生成器和实例解码器。稀疏卷积网络从点云数据中提取出周围环境的全局特征。掩码头、偏移头、分割头从全局特征中分离出掩码特征、质心偏移特征和语义特征。动态权重生成器基于质心偏移特征、语义特征及全局特征,生成相应的位置信息嵌入、类别掩码和不同实例对应的实例权重。实例解码器基于掩码特征、位置信息嵌入和类别掩码生成的实例特征,结合实例权重生成精确地描述动态物体的轮廓的动态目标掩码,以针对点云数据中多样化的动态物体进行精确分割,减少动态物体对静态环境建图的干扰,确保定位与建图的准确性。
技术研发人员:谢东坡,樊莉昌,吴超,顾灿松,游国平,夏小均,颜文森,徐建勋,夏旭,叶磊
受保护的技术使用者:招商局检测车辆技术研究院有限公司
技术研发日:
技术公布日:2025/4/14
- 还没有人留言评论。精彩留言会获得点赞!