一种基于路边无道闸智慧停车管理系统的制作方法
本发明涉及智慧停车领域,尤其涉及一种基于路边无道闸智慧停车管理系统。
背景技术:
1、路边无道闸停车位出于其不需要重新进行规划建设,同时又充分利用空余的道路资源而具有一定的优势,但由于道路两侧的停车位无法安装道闸系统,并且现场通信和供电条件较差,目前多采用人工方式进行收费管理。人工管理方式存在很多弊端,由于收费员技能差异大,产生了大量的停车费流失的现象,有收费员个人原因,有环境天气原因,无法实现全天24小时高效运营。据有关部门的保守统计路边无道闸停车位的停车费流失率在30%左右,从而给国家或单位造成了较大的损失。
2、在停车位资源十分有限的情况下,采用人工的管理的方式效率低,成本高,营收流失率高,已无法适用当前路边停车管理要求,需要通过建设一个智能化的路边停车管理系统,对路边停车位进行无人化管理,实现路边车位运营高效率,低成本,即降本增效。
技术实现思路
1、本发明的目的在于针对上述现有技术的不足,本发明提供了一种基于路边无道闸智慧停车管理系统,使其业务流程精准化、具有高效运营效率、降低了运营成本、增加了运营收益。
2、实现本发明目的的技术解决方案为:
3、本发明包含四个子系统:车位监测机器人、车牌拍摄机器人、超长距离导轨、综控程序,包括如下步骤:
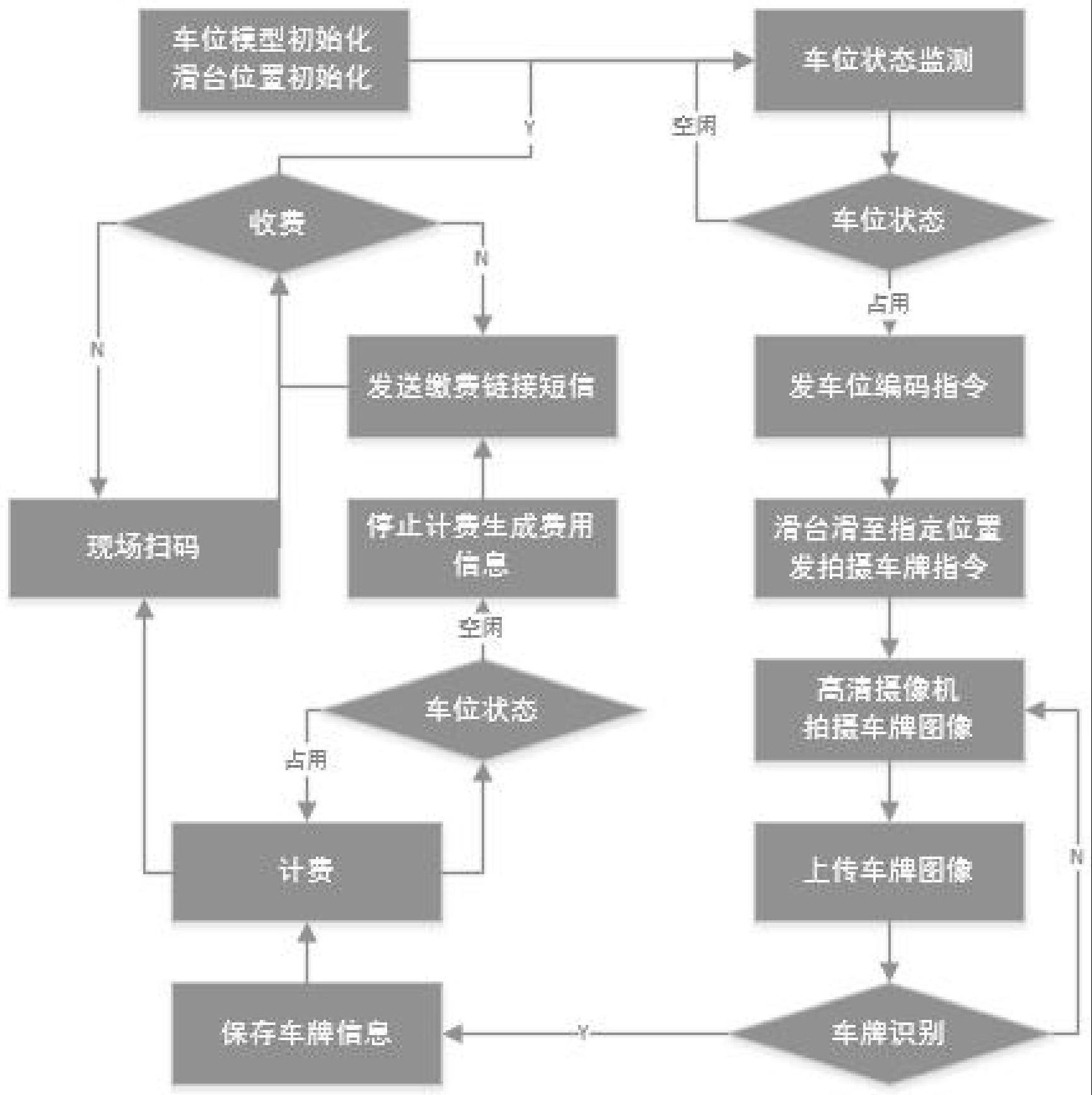
4、步骤1:车位模型初始化、滑台位置初始化;
5、步骤2:车位监测机器人对目标车位状态进行实时监测;
6、步骤3:当车位被目标车型占用时,车位监测机器人发送车位车牌拍照指令;
7、步骤4:车牌拍摄机器人接收拍照指令,将安装有车牌拍摄相机的滑台迅速移动到目标位置,车牌拍摄相机拍照并上传图像;
8、步骤5:综控程序对上述图像进行车牌识别,识别成功后入库保存车牌信息;
9、步骤6:车牌信息保存成功后开始计费,用户离场前通过扫描二维码进行缴费,或者综控程序发送短信通知进行收费;对于缴费成功后,30分钟未离场的车位,进行累计计费。
10、进一步地,所述车位监测机器人使用高位相机,同时配合机器视觉识别系统对目标车位状态进行实时监测。
11、进一步地,所述车牌拍摄机器人在超长距离导轨上滑行工作。
12、进一步地,所述超长距离导轨由两边支柱和中间钢索加钢管架设而成。
13、进一步地,还包括车位预约功能,所述车位预约具体步骤如下:
14、步骤51、在app上进行预约;
15、步骤52、预约后,被预约的停车位限时显示为“禁停区”;
16、步骤53、需要在30分钟内进入预约车位;
17、步骤54、若30分钟内未进入预约车位,则会收到警告通知。
18、与现有技术相比,本发明具有如下有益效果:
19、(1)本发明提供的一种基于路边无道闸智慧停车管理系统,通过架设高位相机、机器视觉识别技术,实现车位状态实时监测,降低车位费流失率,实现车位资源利益最大化。
20、(2)本发明提供的一种基于路边无道闸智慧停车管理系统,通过使用伺服控制技术,实现滑台运动精准控制,提高车牌识别率。
21、(3)本发明提供的一种基于路边无道闸智慧停车管理系统,通过使用钢索加钢管架设导轨,实现超长距离导轨架设。
技术特征:
1.一种基于路边无道闸智慧停车管理系统,包含四个子系统:车位监测机器人、车牌拍摄机器人、超长距离导轨、综控程序,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于路边无道闸智慧停车管理系统,其特征在于:所述车位监测机器人使用高位相机,同时配合机器视觉识别系统对目标车位状态进行实时监测。
3.根据权利要求1所述的一种基于路边无道闸智慧停车管理系统,其特征在于:所述车牌拍摄机器人在超长距离导轨上滑行工作。
4.根据权利要求1所述的一种基于路边无道闸智慧停车管理系统,其特征在于:所述超长距离导轨由两边支柱和中间钢索加钢管架设而成。
5.根据权利要求1所述的一种基于路边无道闸智慧停车管理系统,其特征在于:还包括车位预约功能,所述车位预约具体步骤如下:
技术总结
本发明公开了一种基于路边无道闸智慧停车管理系统,属于智慧停车领域,采用对微型计算机、机器视觉识别技术、滑台运动控制技术及目标检测算法集成为智能机器人,实现智能机器人代替人工对路边停车位进行高效率、低成本运营管理。本发明系统包含四个子系统:车位监测机器人、车牌拍摄机器人、超长距离导轨、综控程序,车位监测机器人使用高位相机配合机器视觉识别系统对车位状态实时监测,发送拍照指令,车牌拍摄机器人接收到拍照指令,拍照并上传图像,综控程序对图像进行车牌识别,保存车牌信息后开始计费。本发明能够降低车位费流失率,实现车位资源利益最大化,同时滑台运动精准控制,提高了车牌识别率。
技术研发人员:成锦,郑建仁,叶绍枫,林非,杨慧龙,范小伟
受保护的技术使用者:南京地铁运营有限责任公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!