一种园区无人驾驶巡逻车交通监测方法及设备与流程
1.本发明属于无人驾驶巡逻车技术领域,涉及一种园区无人驾驶巡逻车交通监测方法及设备。
背景技术:
2.随着国家经济发展,城市乡镇的交通建设在不断进步,采用汽车作为代步方式的居民数量显著增加,而交通违法行为及交通事故的数量也呈显著上升趋势。违章停车、肇事逃逸等现象层出不穷,给国家和人民生命财产带来巨大损失。
3.基于目前现象,国家大力增加城市卡口、十字路口的监控力度,解决了一部分交通问题。但在乡镇地区、公共园区等地区,部分公共设施建设无法满足交通监测需求。同时部分园区已经开始投放无人巡逻车用于园区日常安全巡逻工作。如何利用无人巡逻车有效、科学的进行交通监测工作越来越重要。
技术实现要素:
4.本发明的目的在于克服现有技术方案中的缺点与不足,提出了一种园区无人驾驶巡逻车交通监测方法及设备,提供能够解决园区内部交通监测方法的技术问题。
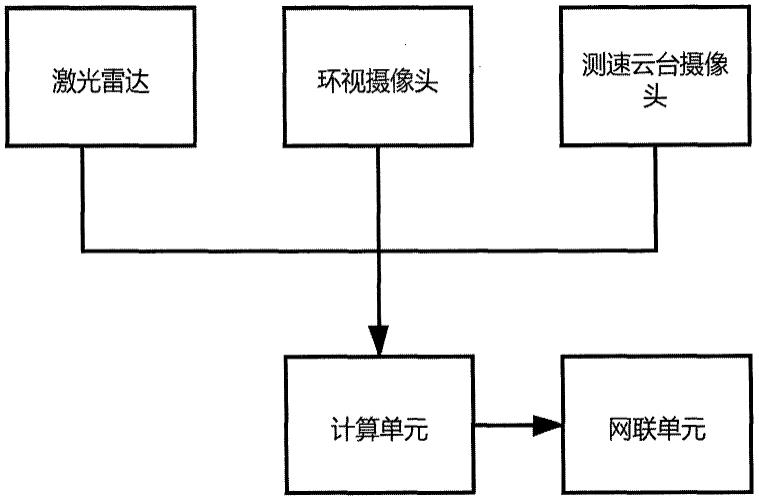
5.为实现上述目的,本发明提出了一种园区无人驾驶巡逻车交通监测方法及设备,系统包含一路多线激光雷达,4组环视摄像头,1组测速云台摄像头,计算单元及网联单元。多线激光雷达及4组环视摄像头进行标定,用于全角度探测周边车辆位置信息。测速云台摄像头用于拍摄对应车辆,检测对象是否存在违章行为。网联单元用于与数据后台通信并上报监测信息。
6.本发明的优点和有益效果是:在多种复杂环境下,如雨雪天,人流密集处,依靠对激光雷达点云数据和摄像头图像数据的融合处理,进行融合目标检测,大大提升车辆检测的准确率并降低了漏检率。车辆检测的加入,大大提高了测速云台摄像头的工作效率。同时由于无人巡逻车可提供全球定位信息,车辆。使用园区无人巡逻车作为载体,进一步扩大了交通监测的范围,覆盖到公共交通监测设施的盲区内。
附图说明
7.下面结合附图和实施例对本发明作进一步说明。下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据本发明实施例的内容和这些附图获得其他的附图。
8.图1为本发明提供的设备连接示意图。
9.图2为交通监测工作流程图。
具体实施方式
10.下面结合附图对本发明作详细描述:
11.如图1所示,多线激光雷达放置于顶部靠前位置,4组环视摄像头分布于车身四周,测速云台摄像头位于车辆中心顶部,三者均连接至计算单元。计算单元与网联单元连接。
12.无人驾驶巡逻车在园区内部正常行驶,多线激光雷达及环视摄像头分别将数据回传至计算单元,检测激光雷达坐标系下周边车辆位置。两组车辆检测数据根据下列公式进行数据融合:
[0013][0014]
矩阵(fu,fv,u0,v0)是相机参数,fu以及fv是xy轴方向尺度因子(水平方向和垂直方向的有效焦距),u0,v0是像平面(image plane)的中心点,又称主点坐标。r为旋转矩阵,t为平移矢量。
[0015]
根据上述公式,将激光点云投影至相机内。相机内目标检测结果依据激光雷达点云,将检测到的车辆信息转换至激光雷达坐标系下。
[0016]
在激光雷达坐标系下,由于不同来源的车辆检测结果中具有相当一部分车辆为同一车辆,此处使用匈牙利算法对目标进行跟踪,筛选出周边的真实车辆情况,并将检测到的车辆的位置信息传递给测速云台摄像头进行计算。同时,计算单元结合无人巡逻车地图信息,计算当前检测到的车辆是否存在违章停车行为。
[0017]
测速云台摄像头获取无人巡逻车周边的车辆信息及违章停车信息,依次对周边车辆进行测速及拍摄工作。拍摄对应车辆照片并获取目标车辆速度后,计算单元将进行以下判断:
[0018]
1.车辆牌照是否完好,并识别车辆牌照;
[0019]
2.车辆是否存在违停行为;
[0020]
3.车辆是否存在超速、逆行行为;
[0021]
4.车辆是否在禁行道路或时间内行驶;
[0022]
5.车辆是否违反交通标志信息;
[0023]
计算单元计算上述信息后,将对应信息、车辆牌照及测速云台摄像头的照片数据通过网联单元发送回数据中心。
[0024]
上述的实施例仅为本发明的优选技术方案,而不应视为对于本发明的限制,本申请中的实施例及实施例中的特征在不冲突的情况下,可以相互任意组合。本发明的保护范围应以权利要求记载的技术方案,包括权利要求记载的技术方案中技术特征的等同替换方案为保护范围。即在此范围内的等同替换改进,也在本发明的保护范围之内。
技术特征:
1.一种园区无人驾驶巡逻车交通监测方法及设备,其特征在于:无人驾驶巡逻车交通监测设备包含一路多线激光雷达,4组环视摄像头,1组测速云台摄像头,计算单元及网联单元。2.根据权利要求1所述的一种园区无人驾驶巡逻车交通监测方法及设备,其特征在于:多线激光雷达放置于顶部靠前位置,4组环视摄像头分布于车身四周,测速云台摄像头位于车辆中心顶部。3.根据权利要求1所述的一种园区无人驾驶巡逻车交通监测方法及设备,其特征在于:多线激光雷达及4组环视摄像头进行标定,用于全角度探测周边车辆位置信息。4.根据权利要求1所述的一种园区无人驾驶巡逻车交通监测方法及设备,其特征在于:多线激光与环视摄像头检测到车辆信息后,发送数据给测速云台摄像头,测速云台摄像头调整视角至对应车辆,检测对象是否存在违章行为,若存在违章行为,则通过网联单元发送至监控后台。
技术总结
本发明提出了一种园区无人驾驶巡逻车交通监测方法及设备,系统包含一路多线激光雷达,4组环视摄像头,1组测速云台摄像头,计算单元及网联单元。多线激光雷达及4组环视摄像头进行标定,用于全角度探测周边车辆位置信息。测速云台摄像头用于拍摄对应车辆,检测对象是否存在违章行为。网联单元用于与数据后台通信并上报监测信息。本发明依托园区无人巡逻车为园区内部的交通监测提供了一种新的方法,有效解决了公共设施建设无法全面覆盖的问题,有效改善园区内部交通环境。改善园区内部交通环境。改善园区内部交通环境。
技术研发人员:卫罗珩
受保护的技术使用者:武汉小狮科技有限公司
技术研发日:2021.05.28
技术公布日:2022/11/29
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1