一种基于车路云一体化的网联自动驾驶方法及云控平台与流程
本发明涉及自动驾驶,具体而言,涉及一种基于车路云一体化的网联自动驾驶方法及云控平台。
背景技术:
1、车辆智能化越来越高,自动驾驶也开始步入生活中。目标自动驾驶领域研究多集中于车路协同方向,通过路侧感知获得的道路信息,通过云端进行数据加工后,或者不经过云端处理直接通过路侧通信设备(多为rsu)发送给车辆,由车辆的控制器控制车辆执行驾驶决策。
2、由于现有车路云协同方案的决策和计算多以车辆为最终实施者,所有信息在车辆上汇总后计算,增加了车辆的计算成本。并且现有的车路云协同方案注重车辆自身的运算能力以及个体车辆的交互,缺少多车协同感知决策规划能力,无法系统性解决交通中多车冲突的问题。同时这种侧重使得云平台参与程度较低,对于全局驾驶的感知融合以及决策规划程度不高,造成自动驾驶的全局意识以及效率较低。此外,由于现有车路云协同方案云端和车端的操作系统和架构通常是两套不同系统,异构数据制约了入网车辆实施网联自动驾驶的便利性。
技术实现思路
1、本发明提供一种基于车路云一体化的网联自动驾驶方法及系统,用以克服现有技术中存在的至少一个技术问题。
2、第一方面,本发明提供的一种基于车路云一体化的网联自动驾驶方法,应用于云控平台,所述云控平台与路侧传感器互相通信,网联自动驾驶方法包括:
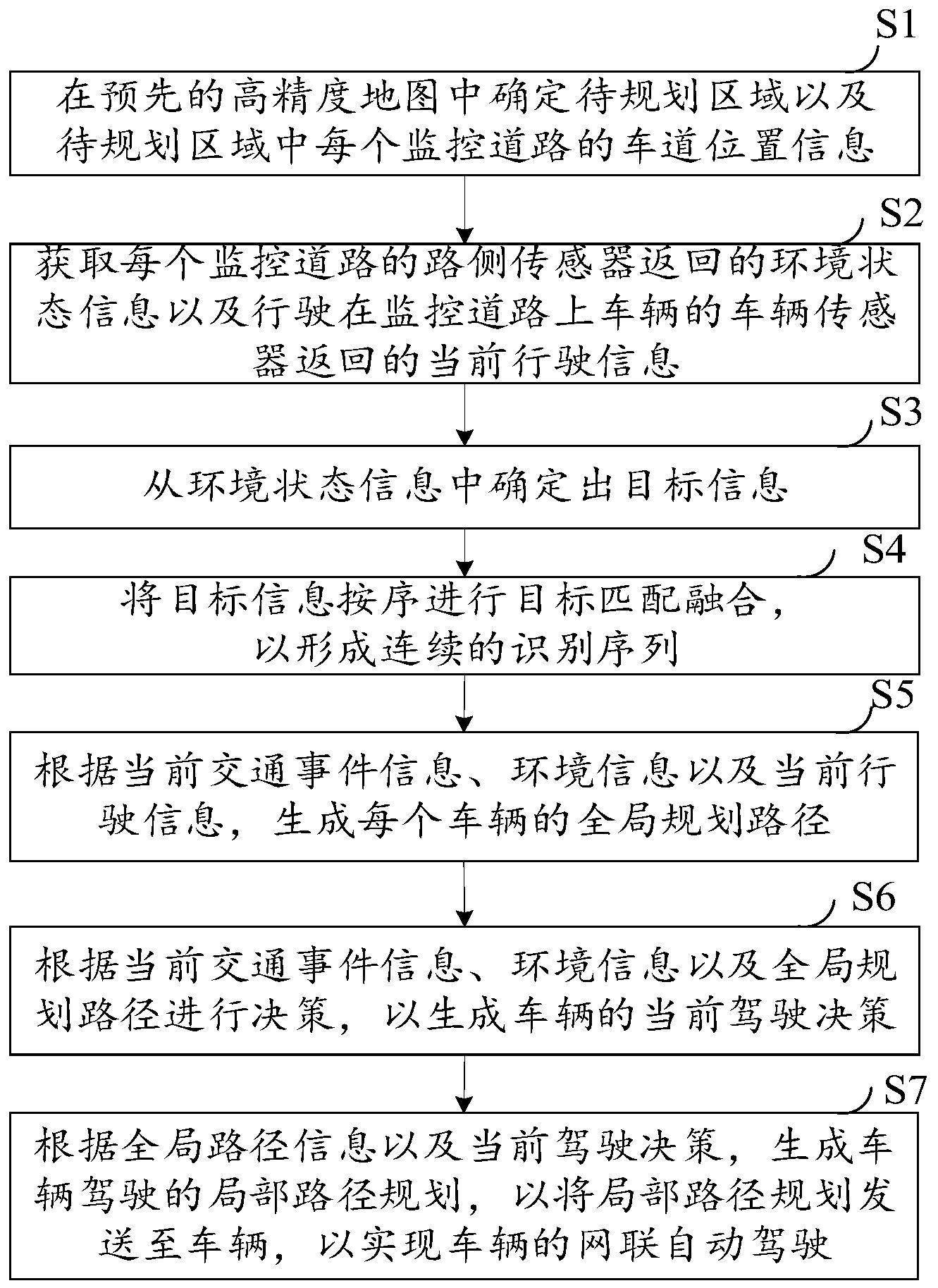
3、在预先的高精度地图中确定待规划区域以及待规划区域中每个监控道路的车道位置信息;
4、获取每个监控道路的路侧传感器返回的环境状态信息以及行驶在监控道路上车辆的车辆传感器返回的当前行驶信息;
5、从环境状态信息中确定出目标信息;
6、其中,环境状态信息包括目标信息、环境信息以及当前交通事件信息、所述目标包括行人和车辆;
7、将目标信息按序进行目标匹配融合,以形成连续的识别序列;
8、根据当前交通事件信息、环境信息以及当前行驶信息,生成每个车辆的全局规划路径;
9、根据当前交通事件信息、环境信息以及全局规划路径进行决策,以生成车辆的当前驾驶决策;
10、根据全局路径信息以及当前驾驶决策,生成车辆驾驶的局部路径规划,以将局部路径规划发送至车辆,以实现车辆的网联自动驾驶。
11、其中,所述车道位置信息包括每个车道在高精度地图中的具体位置,所述目标信息包括目标在高精度地图中的具体位置以及状态,所述路侧传感器包括视频以及雷达传感器,所述环境状态信息为视频数据信息或/和雷达数据信息。
12、可选的,所述将目标信息按序进行目标匹配融合,以形成连续的识别序列包括:
13、按照每个路侧传感器在监控道路中的顺序,将目标信息进行目标匹配;
14、将匹配的目标信息形成序列;
15、对完全重合以及部分重合形成序列的目标信息进行去重处理,以形成识别序列。
16、其中,所述当前行驶信息包括行驶目标地以及行驶趋势。
17、可选的,所述根据当前交通事件信息、环境信息以及当前行驶信息,生成每个车辆的全局规划路径包括:
18、针对每个车辆,确定从目标所处位置至行驶目标地的各个目标车道;
19、根据当前交通事件信息,确定每个目标车道上是否发生交通事件;
20、如果存在某一目标车道发生交通事件,确定交通事件在高精度地图中的位置;
21、根据环境信息以及当前行驶信息,预测车辆下一状态以及在下一状态下某个目标车道是否可能发生交通事件;
22、当根据当前交通事件信息是否确定出交通事件以及预测出的下一状态某一目标车道是否发生交通事件的结果,生成该车辆的全局规划路径。
23、可选的,所述环境信息包括道路上的交通指挥信息以及交通显示信息,所述根据环境信息以及当前行驶信息,预测车辆下一状态以及在下一状态下某个目标车道是否可能发生交通事件包括:
24、根据交通指挥信息、交通显示信息以及当前行驶信息,预测车辆下一状态的行驶信息;
25、根据每个车辆下一状态的行驶信息确定车辆在下一个状态是否可能发生交通事件。
26、可选的,所述根据当前交通事件信息、环境信息以及全局规划路径进行决策,以生成车辆的当前驾驶决策包括:
27、当前交通事件信息、环境信息以及全局规划路径作为预设的决策模型的输入,以使所述决策模型感知环境信息以及当前交通事件信息,并根据全局规划路径,在当前位置处决策出下一状态指示行驶方向以及行驶路线的当前驾驶决策。
28、可选的,在生成车辆的当前驾驶决策之后,所述网联自动驾驶方法还包括:
29、将当前驾驶决策下发至车辆的控制单元,以使车辆按照当前驾驶决策执行。
30、第二方面,本发明提供的一种云控平台,执行第一方面所述的基于车路云一体化的网联自动驾驶方法。
31、本发明实施例的创新点包括:
32、1.本发明提供的一种基于车路云一体化的网联自动驾驶方法,将网联式自动驾驶的算法功能部署在云平台,发挥平台的算力和资源优势,弥补单车计算单元资源不足,且可以并行处理多辆入网车辆的场景并发,这也是本发明实施例的创新点之一。
33、2.本发明提供的一种基于车路云一体化的网联自动驾驶方法,通过将云平台部署的网联式自动驾驶功能架构与单车相同,可以同步提供基于云控的感知、决策、规划结果,为自动驾驶车辆提供全方位的数据功能支持,这也是本发明实施例的创新点之一。
34、3.本发明提供的一种基于车路云一体化的网联自动驾驶方法,可以实现同一场景内的多车协同,云平台同时发送决策规划建议给所有相关车辆,不同车辆同时执行网联功能响应,可以解决自动驾驶车辆个体的全局目标优化问题,这也是本发明实施例的创新点之一。
技术特征:
1.一种基于车路云一体化的网联自动驾驶方法,应用于云控平台,所述云控平台与路侧传感器互相通信,其特征在于,包括:
2.根据权利要求1所述的网联自动驾驶方法,其特征在于,所述车道位置信息包括每个车道在高精度地图中的具体位置,所述目标信息包括目标在高精度地图中的具体位置以及状态。
3.根据权利要求1所述的网联自动驾驶方法,其特征在于,所述路侧传感器包括视频以及雷达传感器,所述环境状态信息为视频数据信息或/和雷达数据信息。
4.根据权利要求1所述的网联自动驾驶方法,其特征在于,所述将目标信息按序进行目标匹配融合,以形成连续的识别序列包括:
5.根据权利要求1所述的网联自动驾驶方法,其特征在于,所述当前行驶信息包括行驶目标地以及行驶趋势。
6.根据权利要求5所述的网联自动驾驶方法,其特征在于,所述根据当前交通事件信息、环境信息以及当前行驶信息,生成每个车辆的全局规划路径包括:
7.根据权利要求6所述的网联自动驾驶方法,其特征在于,所述环境信息包括道路上的交通指挥信息以及交通显示信息,所述根据环境信息以及当前行驶信息,预测车辆下一状态以及在下一状态下某个目标车道是否可能发生交通事件包括:
8.根据权利要求6所述的网联自动驾驶方法,其特征在于,所述根据当前交通事件信息、环境信息以及全局规划路径进行决策,以生成车辆的当前驾驶决策包括:
9.根据权利要求8所述的网联自动驾驶方法,其特征在于,在生成车辆的当前驾驶决策之后,所述网联自动驾驶方法还包括:
10.一种云控平台,其特征在于,执行权利要求1至权利要求9任一项所述的基于车路云一体化的网联自动驾驶方法。
技术总结
本发明提供的一种基于车路云一体化的网联自动驾驶方法,将网联式自动驾驶的算法功能部署在云平台,发挥平台的算力和资源优势,弥补单车计算单元资源不足,且可以并行处理多辆入网车辆的场景并发;并通过将云平台部署的网联式自动驾驶功能架构与单车相同,可以同步提供基于云控的感知、决策、规划结果,为自动驾驶车辆提供全方位的数据功能支持。本发明可以实现同一场景内的多车协同,云平台同时发送决策规划建议给所有相关车辆,可以提升单车自动驾驶的性能和安全边界,并降低车辆的感知决策计算成本,可以解决自动驾驶常见的多车个体决策冲突问题。
技术研发人员:杨轩,常雪阳,宣智渊,李海峰
受保护的技术使用者:云控智行科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!