基于ETC的高速公路安全自动驾驶推荐方法与流程
基于etc的高速公路安全自动驾驶推荐方法
技术领域
1.本发明涉及道路交通安全技术领域,尤其涉及基于etc的高速公路安全自动驾驶推荐方法。
背景技术:
2.近年来随着人工智能技术的快速发展,在高速公路范围内实现无人驾驶车辆的智能化和自动驾驶管控已成为汽车行业发展的重点。然而,如何判断车辆是否安全进入自动驾驶条件本领域呕待解决的问题 ,在一定程度上影响无人驾驶车辆的通行效率,并且容易引发交通事故。
技术实现要素:
3.本发明的目的在于提供基于etc的高速公路安全自动驾驶推荐方法。
4.本发明采用的技术方案是:基于etc的高速公路安全自动驾驶推荐方法,其包括以下步骤:步骤1,搭建平台,构建集群分布式架构数据库,利用区块链技术对数据实时更新和存储公路区域的路况信息;步骤2,利用etc门架获取车辆通过信息;步骤3,车辆用户通过车载终端发送切换自动驾驶模式请求至平台;步骤4,平台获取车辆的位置并结合车辆历史序列信息预测车辆平均车速和驾驶行为,实时上传更新至数据库;具体地,基于现有的数据,我们以etc门架为节点,已知门架之间车辆的通行时间和里程,来计算平均速度。最后根据深度学习gru算法进行预测车辆的平均速度。驾驶行为指的是通过历史观测这辆车在高速公路的行驶状况,例如,一辆货车一周要经过这个高速公路3次,每次的经过的路段是相同的,这样我们就可以提前预测当他上高速公路后,全程的动向。
5.步骤5,平台基于设定范围阈值,实时检索车辆位置范围内是否存在异常信息;是则,通知用户并切换为手动驾驶模式;否则,允许切换进入自动驾驶模式;步骤6,当前车辆用户获取平台反馈信息并执行响应操作。
6.进一步地,车辆通过信息包括车辆类型、入口时间、交易时间、车牌号和门架编号;进一步地,公路区域的路况信息至少包括影响车辆驾驶的异常信息。
7.异常信息包括路况异常区域、养护阶段和异常天气、存在危险车辆。
8.进一步地,步骤4中利用惯导技术通过陀螺和加速度计测量车辆的角速率和加度信息,经积分运算得到车辆的位置信息。
9.进一步地,步骤4中车辆历史序列信息包括车辆类型、速度。
10.进一步地,步骤5中范围阈值m的取值为基于当前车辆位置范围的0~60km。
11.进一步地,路况异常区域包括前方车辆发生交通事故、违停、抛锚以及地面坑洼;
存在危险车辆包括两客一危、超速。
12.本发明采用以上技术方案,提出基于etc数据,利用惯导技术实时获取车辆精确位置,采用深度学习技术,预测未来车辆出行状况:然后采用区块链技术构建数据库平台,实时对数据库更新:最后通过索引车辆周圈范围,结合数据库对比结果,判断该车辆是否符合自动驾驶条件.在一定程度上, 可以有效提高无人驾驶车辆的安全性和效率性,同时为政府、交通等部门提供决策支持。
附图说明
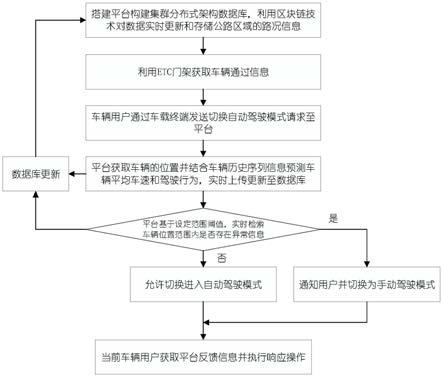
13.以下结合附图和具体实施方式对本发明做进一步详细说明;图1为本发明基于etc的高速公路安全自动驾驶推荐方法的流程示意图。
具体实施方式
14.为使本申请实施例的目的、技术方案和优点更加清楚,下面将结合本申请实施例中的附图对本申请实施例中的技术方案进行清楚、完整地描述。
15.如图1所示,本发明公开了基于etc的高速公路安全自动驾驶推荐方法,其包括以下步骤:步骤1,搭建平台构建集群分布式架构数据库,利用区块链技术对数据实时更新和存储公路区域的路况信息;步骤2,利用etc门架获取车辆通过信息;步骤3,车辆用户通过车载终端发送切换自动驾驶模式请求至平台;步骤4,平台获取车辆的位置并结合车辆历史序列信息预测车辆平均车速和驾驶行为,实时上传更新至数据库;具体的,具体地,基于现有的数据,我们以etc门架为节点,已知门架之间车辆的通行时间和里程,来计算平均速度。最后根据深度学习gru算法进行预测车辆的平均速度。驾驶行为指的是通过历史观测这辆车在高速公路的行驶状况,例如,一辆货车一周要经过这个高速公路3次,每次的经过的路段是相同的,这样我们就可以提前预测当他上高速公路后,全程的动向。平台通过深度学习技术结合车辆历史序列信息预测未来车辆平均车速、驾驶行为等信息。
16.步骤5,平台基于设定范围阈值,实时检索车辆位置范围内是否存在异常信息;是则,通知用户并切换为手动驾驶模式;否则,允许切换进入自动驾驶模式;步骤6,当前车辆用户获取平台反馈信息并执行响应操作。
17.进一步地,车辆通过信息包括车辆类型、入口时间、交易时间、车牌号和门架编号;进一步地,公路区域的路况信息至少包括影响车辆驾驶的异常信息。
18.异常信息包括路况异常区域、养护阶段和异常天气、存在危险车辆。
19.进一步地,步骤4中利用惯导技术通过陀螺和加速度计测量车辆的角速率和加度信息,经积分运算得到车辆的位置信息。
20.进一步地,步骤4中车辆历史序列信息包括车辆类型、速度。
21.进一步地,步骤5中范围阈值m的取值为基于当前车辆位置范围的0~60km。
22.进一步地,路况异常区域包括前方车辆发生交通事故、违停、抛锚以及地面坑洼;
存在危险车辆包括两客一危、超速。
23.本发明采用以上技术方案,提出基于etc数据,利用惯导技术实时获取车辆精确位置,采用深度学习技术,预测未来车辆出行状况:然后采用区块链技术构建数据库平台,实时对数据库更新:最后通过索引车辆周圈范围,结合数据库对比结果,判断该车辆是否符合自动驾驶条件.在一定程度上, 可以有效提高无人驾驶车辆的安全性和效率性,同时为政府、交通等部门提供决策支持。
24.显然,所描述的实施例是本申请一部分实施例,而不是全部的实施例。在不冲突的情况下,本申请中的实施例及实施例中的特征可以相互组合。通常在此处附图中描述和示出的本申请实施例的组件可以以各种不同的配置来布置和设计。因此,本申请的实施例的详细描述并非旨在限制要求保护的本申请的范围,而是仅仅表示本申请的选定实施例。基于本申请中的实施例,本领域普通技术人员在没有作出创造性劳动前提下所获得的所有其他实施例,都属于本申请保护的范围。
技术特征:
1.基于etc的高速公路安全自动驾驶推荐方法,其特征在于:其包括以下步骤:步骤1,搭建平台,构建集群分布式架构数据库,利用区块链技术对数据实时更新和存储公路区域的路况信息;步骤2,利用etc门架获取车辆通过信息;步骤3,车辆用户通过车载终端发送切换自动驾驶模式请求至平台;步骤4,平台获取车辆的位置并结合车辆历史序列信息预测车辆平均车速和驾驶行为,实时上传更新至数据库;步骤5,平台基于设定范围阈值,实时检索车辆位置范围内是否存在异常信息;是则,通知用户并切换为手动驾驶模式;否则,允许切换进入自动驾驶模式;步骤6,当前车辆用户获取平台反馈信息并执行响应操作。2.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:公路区域的路况信息至少包括影响车辆驾驶的异常信息。3.根据权利要求2所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:异常信息包括路况异常区域、养护阶段和异常天气、存在危险车辆。4.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:步骤2的车辆通过信息包括车辆类型、入口时间、交易时间、车牌号和门架编号。5.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:步骤4中利用惯导技术通过陀螺和加速度计测量车辆的角速率和加度信息,经积分运算得到车辆的位置信息。6.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:步骤4中车辆历史序列信息包括车辆类型、速度。7.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:步骤5中范围阈值m的取值为基于当前车辆位置范围的0~60km。8.根据权利要求1所述的基于etc的高速公路安全自动驾驶推荐方法,其特征在于:路况异常区域包括前方车辆发生交通事故、违停、抛锚以及地面坑洼;存在危险车辆包括两客一危、超速。
技术总结
本发明公开基于ETC的高速公路安全自动驾驶推荐方法,基于ETC数据,利用惯导技术实时获取车辆精确位置,采用深度学习技术,预测未来车辆出行状况:然后采用区块链技术构建数据库平台,实时对数据库更新:最后通过索引车辆周圈范围,结合数据库对比结果,判断该车辆是否符合自动驾驶条件.在一定程度上,可以有效提高无人驾驶车辆的安全性和效率性,同时为政府、交通等部门提供决策支持。交通等部门提供决策支持。交通等部门提供决策支持。
技术研发人员:谷庆 林凤榕 黄来荣 赖树坤 吴金山 邹复民 林子杨 林洁
受保护的技术使用者:福建省高速公路信息科技有限公司
技术研发日:2022.02.28
技术公布日:2022/5/31
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1