一种双向绿波协调控制方法与流程
本申请涉及交通,尤其是一种双向绿波协调控制方法。
背景技术:
1、随着城市的发展,交通量呈现抛物线上升,城市管理者对于交通拥堵的治理意识也越来越强。在这样的前提下,信号机控制逐渐从单个路口控制衍生到多个相邻路口的协调控制,即绿波控制。其中双向绿波协调控制则更加实用先进,它满足了主干道两个方向的车流量,在通过相关路口时,连续绿灯通行,这样可以大大提高通行效率。但是目前绿波协调控制多利用时距图进行配时计算,计算复杂度较高,尤其是双向绿波协调控制更是难度较大,影响了双向绿波协调控制的应用。
技术实现思路
1、本申请人针对上述问题及技术需求,提出了一种双向绿波协调控制方法,本申请的技术方案如下:
2、一种双向绿波协调控制方法,该方法包括:
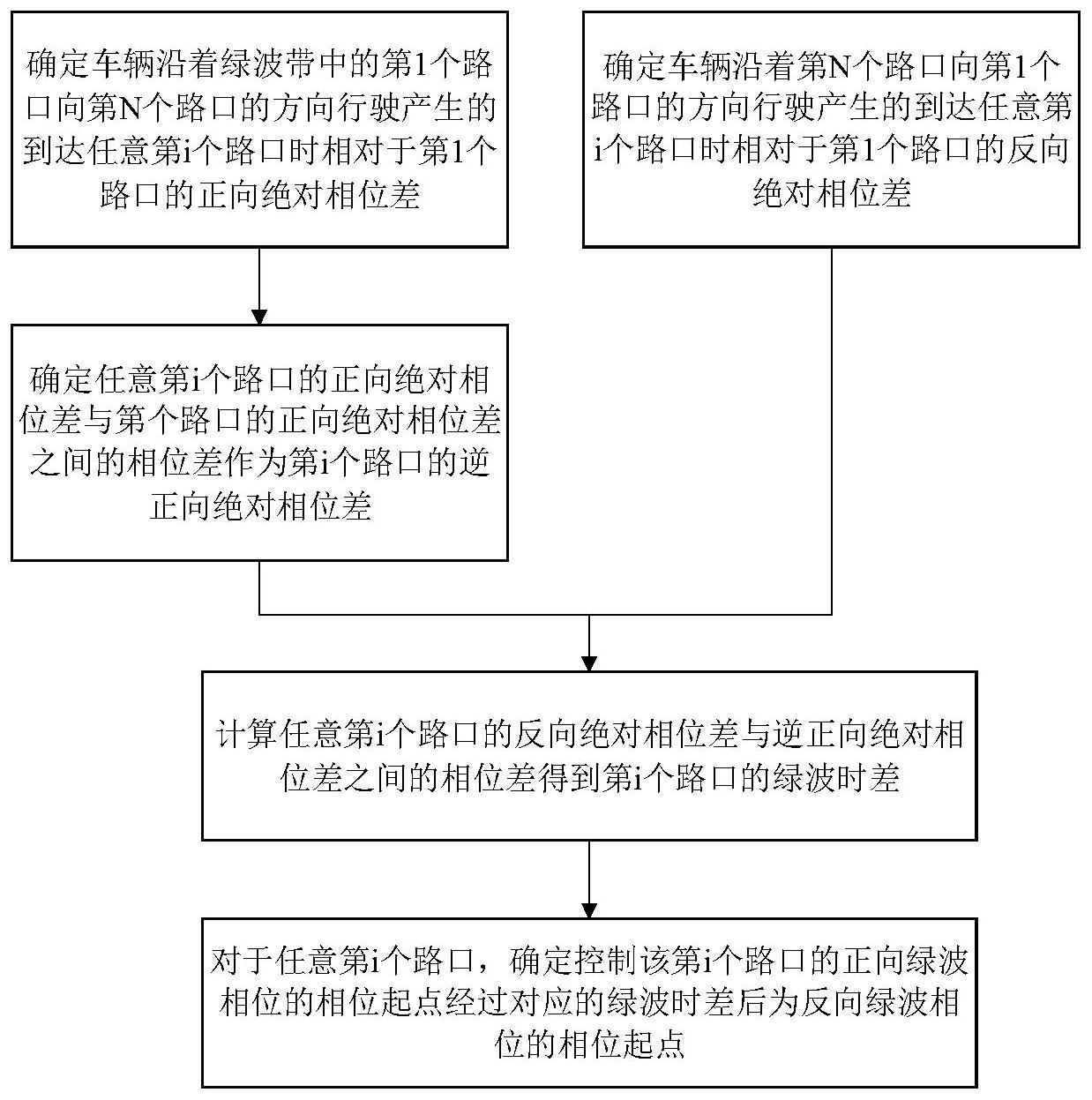
3、确定车辆沿着绿波带中的第1个路口向第n个路口的方向行驶产生的到达任意第i个路口时相对于第1个路口的正向绝对相位差tp(i),以及确定车辆沿着第n个路口向第1个路口的方向行驶产生的到达任意第i个路口时相对于第1个路口的反向绝对相位差tn(i),i为参数且i∈[1,n];
4、确定任意第i个路口的正向绝对相位差tp(i)与第n个路口的正向绝对相位差tn(i)之间的相位差作为第i个路口的逆正向绝对相位差tp′(i);
5、计算任意第i个路口的反向绝对相位差tn(i)与逆正向绝对相位差tp′(i)之间的相位差得到第i个路口的绿波时差δt(i);
6、对于任意第i个路口,确定控制第i个路口的正向绿波相位的相位起点经过对应的绿波时差δt(i)后为反向绿波相位的相位起点,正向绿波相位是放行沿着第1个路口向第n个路口的方向行驶的车辆的相位,反向绿波相位是放行沿着第n个路口向第1个路口的方向行驶的车辆的相位。
7、其进一步的技术方案为,确定任意第i个路口的逆正向绝对相位差tp′(i)的方法包括:
8、当tp(i)≥tp(n)时确定tp′(i)=tp(i)-tp(n);
9、当tp(i)<tp(n)时确定tp′(i)=tp(i)+k1*c-tp(n),其中,c为协调控制周期的总时长,k1为整数参数,且tp(i)+(k1-1)*c<tp(n)≤tp(i)+k1*c。
10、其进一步的技术方案为,确定任意第i个路口的绿波时差δt(i)的方法包括:
11、当tn(i)≥tp′(i)时确定δt(i)=tn(i)-tp′(i);
12、当tn(i)<tp′(i)时确定δt(i)=tn(i)+k2*c-tp′(i),其中,c为协调控制周期的总时长,k2为整数参数,且tn(i)+(k2-1)*c<tp′(i)≤tn(i)+k2*c。
13、其进一步的技术方案为,确定任意第i个路口的正向绝对相位差tp(i)的方法包括:
14、以第1个路口的正向绝对相位差tp(1)=0,确定其他第i个路口与第1个路口之间的路口间距lp(i),当时确定第i个路口的正向绝对相位差当时确定第i个路口的正向绝对相位差其中,v是绿波时速,η是第一预留时长,c为协调控制周期的总时长,p为整数参数,且
15、其进一步的技术方案为,确定任意第i个路口的反向绝对相位差tn(i)的方法包括:
16、以第n个路口的反向绝对相位差tn(n)=0,确定其他任意第i个路口与第n个路口之间的路口间距ln(i),当时确定第i个路口的反向绝对相位差当时确定第i个路口的反向绝对相位差其中,v是绿波时速,δ是第二预留时长,c为协调控制周期的总时长,n为整数参数,且
17、其进一步的技术方案为,确定第i个路口的各个相位的相位时长,包括:
18、确定第i个路口的双向协调相位的iq以及iw=iq+δt(i);
19、确定第i个路口的除双向协调相位之外的相位ie=δt(i)-iq以及ir=c-δt(i)-iw,c为协调控制周期的总时长。
20、其进一步的技术方案为,该方法还包括:
21、根据第i个路口的绿波时差δt(i)、正向绿波相位的时长iq(i)和反向绿波相位的时长iw(i)确定总时长为c的当前协调控制周期内的其余相位的总时长t;
22、对其余相位的总时长t进行相位拆解得到除正向绿波相位和反向绿波相位之外的其余各个相位的时长。
23、其进一步的技术方案为,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
24、当δt(i)=0时,确定第i个路口的正向绿波相位和反向绿波相位的相位起点重合而同时放行,并确定当前协调控制周期内的其余相位的总时长t=c-imax(i),imax(i)是第i个路口的正向绿波相位的时长iq(i)和反向绿波相位的时长iw(i)中的较大值。
25、其进一步的技术方案为,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
26、当0<δt(i)<iq(i)时,确定第i个路口的正向绿波相位的相位起点经过δt(i)后为反向绿波相位的相位起点,且正向绿波相位的相位末段与反向绿波相位的重合时长ct(i)=iq(i)-δt(i),确定其余相位的总时长t=c-iw(i)-δt(i)。
27、其进一步的技术方案为,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
28、当iq(i)≤δt(i)<c-iw(i)时,确定第i个路口的正向绿波相位的相位起点经过δt(i)后为反向绿波相位的相位起点,且正向绿波相位与反向绿波相位不重合,确定其余相位的总时长t=c-iw(i)-δt(i)。
29、其进一步的技术方案为,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
30、当c-iw(i)≤δt(i)<c时,确定第i个路口的正向绿波相位的相位起点经过δt(i)后为反向绿波相位的相位起点,且反向绿波相位的相位末段与下一个协调控制周期的正向绿波相位的重合时长ct(i)=iw(i)+δt(i)-c,确定当前协调控制周期内其余相位的总时长t=δt(i)-iq(i)。
31、本申请的有益技术效果是:
32、本申请公开了一种双向绿波协调控制方法,该方法根据路口间距、协调控制周期的总时长以及绿波时速,通过数学建模的方法可以计算得到不同路口之间的相位差、相序以及相位组成,从而可以快速完成配时计算,高效实现双向绿波控制。
技术特征:
1.一种双向绿波协调控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的双向绿波协调控制方法,其特征在于,确定任意第i个路口的逆正向绝对相位差t′p(i)的方法包括:
3.根据权利要求1所述的双向绿波协调控制方法,其特征在于,确定任意第i个路口的绿波时差δt(i)的方法包括:
4.根据权利要求1所述的双向绿波协调控制方法,其特征在于,确定任意第i个路口的正向绝对相位差tp(i)的方法包括:
5.根据权利要求1所述的双向绿波协调控制方法,其特征在于,确定任意第i个路口的反向绝对相位差tn(i)的方法包括:
6.根据权利要求1所述的双向绿波协调控制方法,其特征在于,所述方法还包括对于任意第i个路口:
7.根据权利要求6所述的双向绿波协调控制方法,其特征在于,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
8.根据权利要求6所述的双向绿波协调控制方法,其特征在于,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
9.根据权利要求6所述的双向绿波协调控制方法,其特征在于,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
10.根据权利要求6所述的双向绿波协调控制方法,其特征在于,确定总时长为c的当前协调控制周期内的其余相位的总时长t的方法包括:
技术总结
本申请公开了一种双向绿波协调控制方法,涉及交通技术领域,该方法在确定绿波带中各个路口的正向绝对相位差和反向绝对相位差后,得到每个路口的正向绝对相位差与最后一个路口的正向绝对相位差之间的相位差作为逆正向绝对相位差,然后计算每个路口的反向绝对相位差与逆正向绝对相位差之间的相位差得到绿波时差,通过相位拆解结合任意路口的绿波时差即可确定各个相位的相位时长。该方法通过数学建模的方法可以计算得到不同路口之间的相位差、相序以及相位组成,从而可以快速完成配时计算,高效实现双向绿波控制。
技术研发人员:曹俊,周勋,冯超,王超,申玲玲
受保护的技术使用者:江苏航天大为科技股份有限公司
技术研发日:
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!