一种基于雷达检测器的交叉口信号灯自适应控制方法与流程
本申请涉及交通,尤其是一种基于雷达检测器的交叉口信号灯自适应控制方法。
背景技术:
1、随着我国城市化进程的迅速发展,机动车保有量逐年上升,城市交通问题日渐突出,尤其高峰时段,中心城区的平面交叉口多处于车流量过饱和状态,通行效率低。
2、为了解决某些重要交叉口的车流量过饱和问题,目前会由这些重要交叉口的交警对信号灯进行手动干预,也即交警看到哪个路口的进口车辆较多,就凭经验手动控制延长该路口的绿灯时长。但是交叉口的交通状态是实时变化的,而且目前出现车流量过饱和问题的交叉口也越来越多,每个交叉口都配备交警进行人工干预的做法不仅效率低,控制逻辑也依赖于交警人为经验而效果未必理想。
技术实现思路
1、本申请人针对上述问题及技术需求,提出了一种基于雷达检测器的交叉口信号灯自适应控制方法,本申请的技术方案如下:
2、一种基于雷达检测器的交叉口信号灯自适应控制方法,该方法包括:
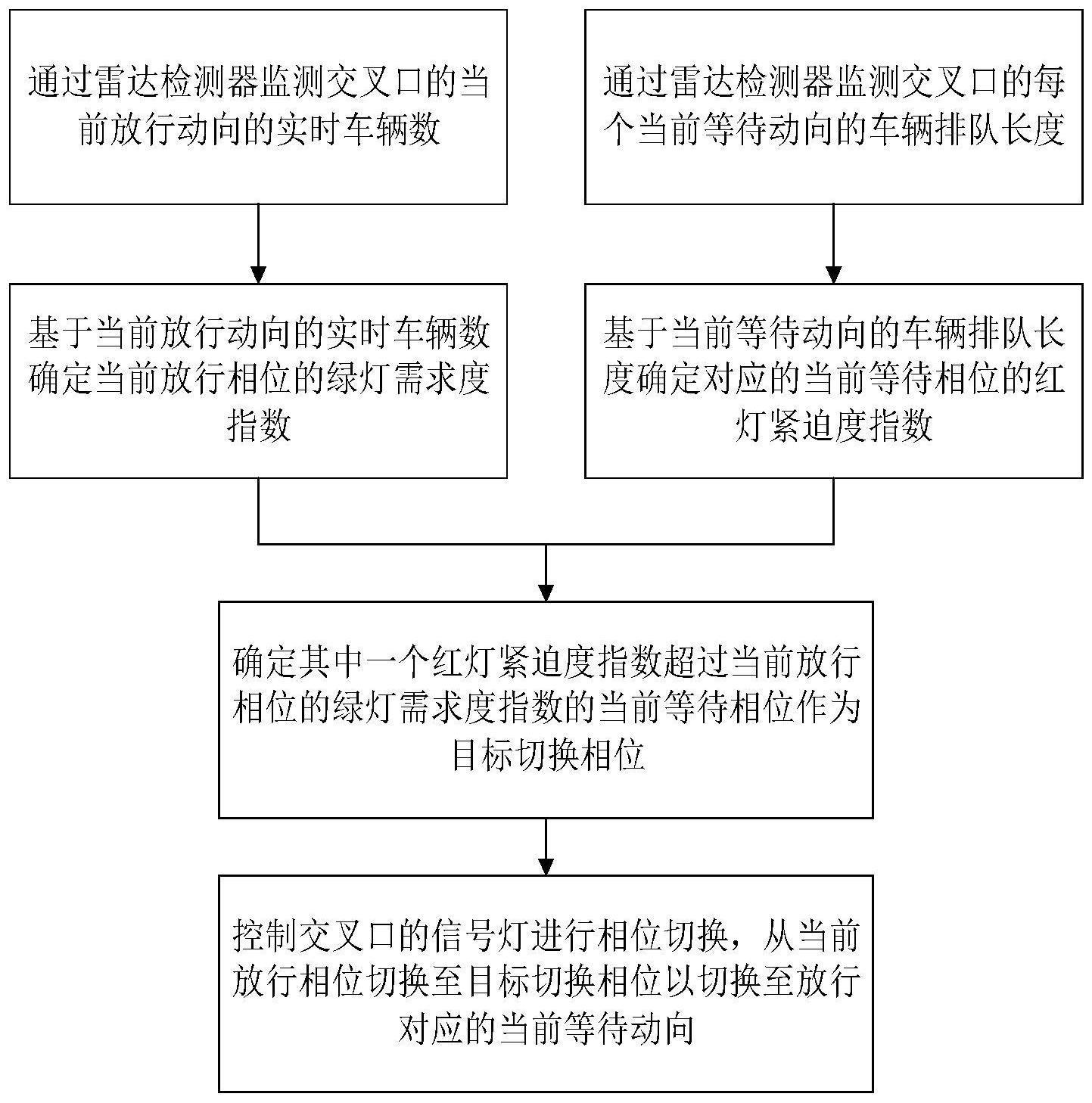
3、通过雷达检测器监测交叉口的当前放行动向的实时车辆数,并基于当前放行动向的实时车辆数确定当前放行相位的绿灯需求度指数,预定时长t内监测到的当前放行动向的实时车辆数越多、当前放行相位的绿灯需求度指数越大;
4、通过雷达检测器监测交叉口的每个当前等待动向的车辆排队长度,并基于当前等待动向的车辆排队长度确定各个当前等待相位的红灯紧迫度指数,当前等待动向的车辆排队长度越长、对应的当前等待相位的红灯紧迫度指数越大;
5、确定其中一个红灯紧迫度指数超过当前放行相位的绿灯需求度指数的当前等待相位作为目标切换相位,并控制交叉口的信号灯进行相位切换,从当前放行相位切换至目标切换相位以切换至放行对应的当前等待动向。
6、其进一步的技术方案为,当前放行相位的绿灯需求度指数还与雷达检测器监测到的当前放行动向的车头时距相关,车头时距越小、雷达检测器感应的脉冲频率越高、当前放行动向的绿灯需求度指数越大。
7、其进一步的技术方案为,当前放行相位的绿灯需求度指数a=k1*n+p,n是在预定时长t内监测到的当前放行动向的实时车辆数,k1是比例系数,p表示雷达检测器感应的脉冲频率且p=(t0-△t)/t,t0是时间常数,△t是雷达检测器监测到的当前放行动向的车头时距。
8、其进一步的技术方案为,每个当前等待相位的红灯紧迫度指数还与交叉口及其对应的当前等待动向的来车方向的上游交叉口之间的距离相关,交叉口及其上游交叉口之间的距离越小,当前等待相位的红灯紧迫度指数越大。
9、其进一步的技术方案为,每个当前等待相位的红灯紧迫度指数还与对应的当前等待动向的来车频率相关,对应的当前等待动向的来车频率越高,当前等待相位的红灯紧迫度指数越大。
10、其进一步的技术方案为,每个当前等待相位的红灯紧迫度指数还与交叉口的信号灯采用的相位切换顺序相关,当前等待相位与当前放行相位之间间隔的其他相位的数量越多,当前等待相位的红灯紧迫度指数越大。
11、其进一步的技术方案为,任意一个当前等待相位的红灯紧迫度指数b=k2*l+d+k3*f+h,其中,k2和k3均为比例系数,l是当前等待相位对应的当前等待动向的车辆排队长度,d是交叉口及当前等待相位对应的当前等待动向的上游交叉口之间的距离,f是当前等待相位对应的当前等待动向的来车频率,h是相位相序系数,当前等待相位与当前放行相位之间间隔的其他相位的数量越多,相位相序系数h越大。
12、其进一步的技术方案为,交叉口的信号灯基于ring-barrier双环相位控制模式进行相位切换,控制交叉口的信号灯进行相位切换的方法包括:
13、确定同一个控制环中红灯紧迫度指数超过当前放行相位的绿灯需求度指数的当前等待相位作为目标切换相位,在ring-barrier双环相位控制模式的环约束和分界约束的约束条件下,从当前放行相位切换到同一个控制环内的目标切换相位;
14、其中,环约束指示属于同一个控制环的多个存在冲突的相位依次切换,分界约束指示一个控制周期的同一个相域内的两个控制环的相位在分界处同时结束,分界位于一个控制周期内的不同的相域之间。
15、其进一步的技术方案为,目标切换相位与当前放行相位属于同一个相域,目标切换相位按照切换顺序在当前放行相位之后,或者目标切换相位按照切换顺序在当前放行相位之前,则任意一个相位在同一个相域内包含一次或多次,同一个相域内的任意两个相位的总相位时长相等或不相等。
16、其进一步的技术方案为,目标切换相位与当前放行相位属于不同的相域,则在当前放行相位所在的相域内按照各个控制环的相位切换顺序依次切换直至当前相域结束,在目标切换相位所在的相域内按照各个控制环的相位切换顺序依次切换直至切换至目标切换相位;目标切换相位与当前放行相位属于同一个控制周期,或者,目标切换相位与当前放行相位属于不同的控制周期;则一个控制周期内的两个相域的总时长相等或不相等,任意两个控制周期的总时长相等或不相等。
17、本申请的有益技术效果是:
18、本申请公开了一种基于雷达检测器的交叉口信号灯自适应控制方法,该方法通过雷达检测器采集实时路段的数据并确定不同动向的绿灯需求度指数和红灯紧迫度指数,并基于红灯紧迫度指数和绿灯需求度指数的比较分析进行自动化的相位切换,以协调不同动向的车流量,使得各动向压力均分负载均衡,提高车流的通行效率。
19、本申请的方法对传统的ring-barrier双环相位控制模式做了优化,通过对实时的车辆通行数据进行检测可以调节各个相位的长度,在满足相位间的约束的情况下自动不对称式的放行方式,放行灵活度高,可以真正的做到全动向的自适应,实现平峰时期减少停车,高峰时期减少延误的效果,实现时空分配,最大化的利用时间和空间,提高通行效率,且无需复杂的基础方案参数配置,实现方式简单。
技术特征:
1.一种基于雷达检测器的交叉口信号灯自适应控制方法,其特征在于,所述方法包括:
2.根据权利要求1所述的方法,其特征在于,当前放行相位的绿灯需求度指数还与所述雷达检测器监测到的当前放行动向的车头时距相关,车头时距越小、所述雷达检测器感应的脉冲频率越高、当前放行动向的绿灯需求度指数越大。
3.根据权利要求2所述的方法,其特征在于,当前放行相位的绿灯需求度指数a=k1*n+p,n是在预定时长t内监测到的当前放行动向的实时车辆数,k1是比例系数,p表示所述雷达检测器感应的脉冲频率且p=(t0-△t)/t,t0是时间常数,△t是所述雷达检测器监测到的当前放行动向的车头时距。
4.根据权利要求1所述的方法,其特征在于,每个当前等待相位的红灯紧迫度指数还与所述交叉口及其对应的当前等待动向的来车方向的上游交叉口之间的距离相关,所述交叉口及其上游交叉口之间的距离越小,所述当前等待相位的红灯紧迫度指数越大。
5.根据权利要求4所述的方法,其特征在于,每个当前等待相位的红灯紧迫度指数还与对应的当前等待动向的来车频率相关,对应的当前等待动向的来车频率越高,当前等待相位的红灯紧迫度指数越大。
6.根据权利要求5所述的方法,其特征在于,每个当前等待相位的红灯紧迫度指数还与所述交叉口的信号灯采用的相位切换顺序相关,当前等待相位与当前放行相位之间间隔的其他相位的数量越多,当前等待相位的红灯紧迫度指数越大。
7.根据权利要求6所述的方法,其特征在于,任意一个当前等待相位的红灯紧迫度指数b=k2*l+d+k3*f+h,其中,k2和k3均为比例系数,l是当前等待相位对应的当前等待动向的车辆排队长度,d是所述交叉口及所述当前等待相位对应的当前等待动向的上游交叉口之间的距离,f是所述当前等待相位对应的当前等待动向的来车频率,h是相位相序系数,当前等待相位与当前放行相位之间间隔的其他相位的数量越多,相位相序系数h越大。
8.根据权利要求1所述的方法,其特征在于,所述交叉口的信号灯基于ring-barrier双环相位控制模式进行相位切换,控制所述交叉口的信号灯进行相位切换的方法包括:
9.根据权利要求8所述的方法,其特征在于,
10.根据权利要求8所述的方法,其特征在于,目标切换相位与当前放行相位属于不同的相域,则在所述当前放行相位所在的相域内按照各个控制环的相位切换顺序依次切换直至当前相域结束,在所述目标切换相位所在的相域内按照各个控制环的相位切换顺序依次切换直至切换至目标切换相位;所述目标切换相位与所述当前放行相位属于同一个控制周期,或者,所述目标切换相位与所述当前放行相位属于不同的控制周期;则一个控制周期内的两个相域的总时长相等或不相等,任意两个控制周期的总时长相等或不相等。
技术总结
本申请公开了一种基于雷达检测器的交叉口信号灯自适应控制方法,涉及交通技术领域,该方法通过雷达检测器监测交叉口的当前放行动向的实时车辆数并确定当前放行相位的绿灯需求度指数,同时通过雷达检测器监测交叉口的每个当前等待动向的车辆排队长度以确定各个当前等待相位的红灯紧迫度指数,在当前等待相位的红灯紧迫度指数超过当前放行相位的绿灯需求度指数时尽快实现相位切换。该方法基于实时的车辆数据进行比较分析进行自动化的相位切换,以协调不同动向的车流量,实现不对称式相位放行,使得各动向压力均分负载均衡,提高车流的通行效率。
技术研发人员:刘杰,王晓磊,景钟翔,冷天航,王胜
受保护的技术使用者:江苏航天大为科技股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!