公交行驶状态的预测及信号控制方法、装置、设备与介质与流程
本公开涉及人工智能领域,尤其涉及自动驾驶、智能交通等,提供了一种公交行驶状态的预测及信号控制方法、装置、设备与介质。
背景技术:
1、在公交优先场景下,准确且稳定地预测公交车辆达到信号交叉口的时间,才能准确调整信号灯方案,达到较好的优先效果。若时间预测不准、信号灯方案调整频繁,会造成公交车辆车优先效果不理想,还会影响交叉口车辆的正常通行。其中,准确、稳定的预测到达交叉口时间的关键在于:(1)准确计算车辆所在位置距离交叉口的距离;(2)准确计算车辆行驶速度;(3)根据车辆行驶状态多次调整优先方案且不能过于频繁。
2、现有的公交优先场景下的预测到达信号交叉口时间的方案为:
3、(1)车辆距离交叉口距离:a)采用车辆gps(全球定位系统)坐标与交叉口gps坐标直线距离,但是该方案会因不规则路段计算误差较大;b)采用固定检测位置,该方案灵活性较差,算法在进行优先决策的时候不能自主决策开始控制的时刻和距离,且存在而且增加了成本投入的缺陷。
4、(2)行程时间预测:a)基于kalam(卡尔曼算法)的行程时间预测方案,但是该方案基于车辆处于稳定运行状态且干扰因素是正态分布的条件实现,且默认车辆速度可信,存在较多前提条件才能有效实现;b)基于历史速度和时间规律等确定行程时间,然而该方案对实时情况无法响应,且依赖大量历史数据才能实现,具有一定的实现局限性;c)基于神经网络模型预测行程时间,该方案需要基于大量历史数据训练模型,对不同的道路情况需要分别训练,存在使用复杂且容易发生过拟合和欠拟合等问题。
5、另外,在公交优先场景下信号交叉口的排队情况也对公交车辆车到达路口时间影响极大。目前对排队数据的检测普遍依赖路侧检测设备,例如视频、雷达、地磁等,这样的检测方式在排队长度不较长是无法保证采集的数据的准确度,对检测设备的稳定运行要求极高,然而路侧检测设备不稳定属于常态;另外,对硬件设备建设成本极大,现实中很难覆盖到每一个路口。
技术实现思路
1、本公开要解决的技术问题是为了克服现有技术中在公交优先场景下,无存在法保证对公交行驶状态进行准确且稳定地预测的缺陷,提供一种公交行驶状态的预测及信号控制方法、装置、设备与介质。
2、本公开是通过下述技术方案来解决上述技术问题:
3、根据本公开的一方面,提供一种公交行驶状态的预测方法,所述预测方法包括:
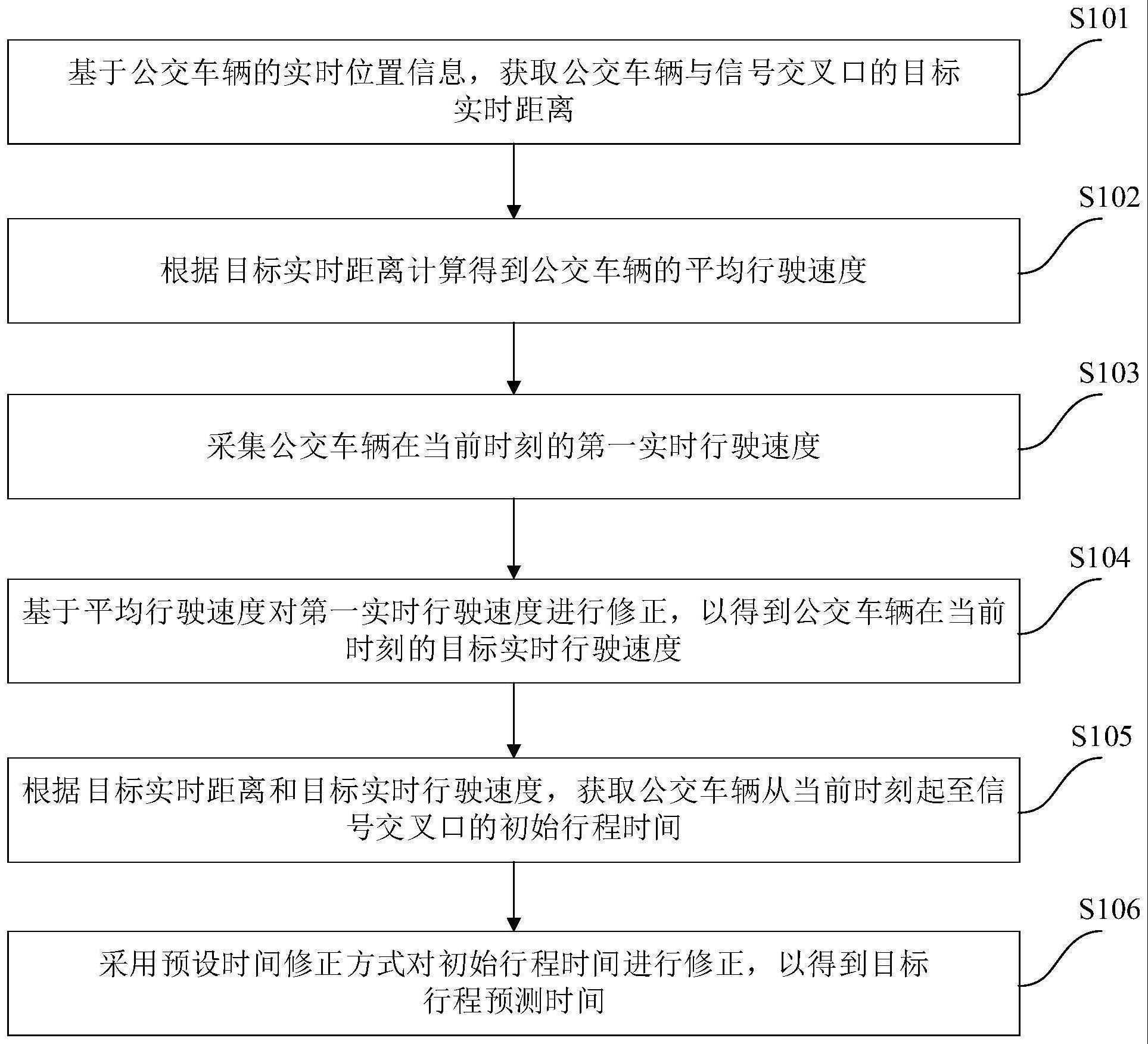
4、基于公交车辆的实时位置信息,获取所述公交车辆与信号交叉口的目标实时距离;
5、根据所述目标实时距离计算得到所述公交车辆的平均行驶速度;
6、采集所述公交车辆在当前时刻的第一实时行驶速度;
7、基于所述平均行驶速度对所述第一实时行驶速度进行修正,以得到所述公交车辆在所述当前时刻的目标实时行驶速度;
8、根据所述目标实时距离和所述目标实时行驶速度,获取所述公交车辆从所述当前时刻起至所述信号交叉口的初始行程时间;
9、采用预设时间修正方式对所述初始行程时间进行修正,以得到目标行程预测时间。
10、根据本公开的另一方面,提供一种信号控制方法,所述信号控制方法应用公交优先场景中,所述信号控制方法基于上述的公交行驶状态的预测方法实现;
11、所述信号控制方法包括:
12、获取基于所述预测方法得到的公交车辆从当前时刻起至信号交叉口的目标行程预测时间;
13、根据所述目标行程预测时间生成所述信号交叉口的信号灯的控制策略;
14、基于所述控制策略控制所述信号交叉口的所述信号灯的工作状态。
15、根据本公开的另一方面,提供一种公交行驶状态的预测装置,所述预测装置包括:
16、目标实时距离获取模块,用于基于公交车辆的实时位置信息,获取所述公交车辆与信号交叉口的目标实时距离;
17、平均行驶速度获取模块,用于根据所述目标实时距离计算得到所述公交车辆的平均行驶速度;
18、第一行驶速度采集模块,用于采集所述公交车辆在当前时刻的第一实时行驶速度;
19、行驶速度修正获取模块,用于基于所述平均行驶速度对所述第一实时行驶速度进行修正,以得到所述公交车辆在所述当前时刻的目标实时行驶速度;
20、初始行程时间获取模块,用于根据所述目标实时距离和所述目标实时行驶速度,获取所述公交车辆从所述当前时刻起至所述信号交叉口的初始行程时间;
21、行程预测时间修正模块,用于采用预设时间修正方式对所述初始行程时间进行修正,以得到目标行程预测时间。
22、根据本公开的另一方面,提供一种信号控制装置,所述信号控制装置应用公交优先场景中,所述信号控制装置基于上述的公交行驶状态的预测装置实现;
23、所述信号控制装置包括:
24、目标行程预测时间获取模块,用于获取基于所述预测装置得到的公交车辆从当前时刻起至信号交叉口的目标行程预测时间;
25、控制策略生成模块,用于根据所述目标行程预测时间生成所述信号交叉口的信号灯的控制策略;
26、信号控制模块,用于基于所述控制策略控制所述信号交叉口的所述信号灯的工作状态。
27、根据本公开的另一方面,提供一种电子设备,包括:
28、至少一个处理器;以及
29、与所述至少一个处理器通信连接的存储器;其中,
30、所述存储器存储有可被所述至少一个处理器执行的指令,所述指令被所述至少一个处理器执行,以使所述至少一个处理器能够执行上述的方法。
31、根据本公开的另一方面,提供一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行上述的方法。
32、根据本公开的另一方面,提供一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现上述的方法。
33、应当理解,本部分所描述的内容并非旨在标识本公开的实施例的关键或重要特征,也不用于限制本公开的范围。本公开的其它特征将通过以下的说明书而变得容易理解。
技术特征:
1.一种公交行驶状态的预测方法,所述预测方法包括:
2.如权利要求1所述的公交行驶状态的预测方法,所述基于公交车辆的实时位置信息,获取所述公交车辆在当前时刻与信号交叉口的目标实时距离的步骤之前,还包括:
3.如权利要求2所述的公交行驶状态的预测方法,所述基于公交车辆的实时位置信息,获取所述公交车辆与信号交叉口的目标实时距离的步骤,包括:
4.如权利要求3所述的公交行驶状态的预测方法,所述基于所述平均行驶速度对所述第一实时行驶速度进行修正,以得到所述公交车辆在所述当前时刻的目标实时行驶速度的步骤,包括:
5.如权利要求3所述的公交行驶状态的预测方法,所述根据所述目标实时距离和所述目标实时行驶速度,获取所述公交车辆从所述当前时刻起至所述信号交叉口的初始行程时间的步骤,包括:
6.如权利要求5所述的公交行驶状态的预测方法,所述预测方法还包括:
7.如权利要求6所述的公交行驶状态的预测方法,所述基于所述目标历史行程预测时间、所述当前时刻对应的所述初始行程时间、所述第一时间权重和所述第二时间权重,计算得到所述公交车辆从所述当前时刻起至所述信号交叉口的所述目标行程预测时间的步骤,包括:
8.如权利要求6所述的公交行驶状态的预测方法,相邻的两个所述历史时刻相隔设定时长。
9.如权利要求1-8中任一项所述的公交行驶状态的预测方法,所述预测方法还包括:
10.如权利要求8所述的公交行驶状态的预测方法,所述判断所述公交车辆是否在处于所述信号交叉口周围且处于排队状态的步骤,包括:
11.如权利要求9所述的公交行驶状态的预测方法,所述基于所述排队长度获取自所述信号交叉口的绿灯开启后,所述公交车辆通过停止线所需的排队消散时间的步骤,包括:
12.如权利要求11所述的公交行驶状态的预测方法,所述根据所述起动波波速和所述排队长度,获取自所述信号交叉口的绿灯开启后,所述公交车辆通过所述停止线所需的排队消散时间的步骤,包括:
13.一种信号控制方法,所述信号控制方法应用公交优先场景中,所述信号控制方法基于权利要求1-12中任一项所述的公交行驶状态的预测方法实现;
14.一种公交行驶状态的预测装置,所述预测装置包括:
15.如权利要求14所述的公交行驶状态的预测装置,所述预测装置还包括:
16.如权利要求15所述的公交行驶状态的预测装置,所述目标实时距离获取模块还包括:
17.如权利要求16所述的公交行驶状态的预测装置,所述行驶速度修正获取模块包括:
18.如权利要求16所述的公交行驶状态的预测装置,所述初始行程时间获取模块用于计算得到所述第二实时距离与所述目标实时行驶速度的第二比值,以作为所述公交车辆从所述当前时刻起至所述信号交叉口的所述初始行程时间。
19.如权利要求18所述的公交行驶状态的预测装置,所述预测装置还包括:
20.如权利要求19所述的公交行驶状态的预测装置,所述行程预测时间修正模块包括:
21.如权利要求19所述的公交行驶状态的预测装置,相邻的两个所述历史时刻相隔设定时长。
22.如权利要求14-21中任一项所述的公交行驶状态的预测装置,所述预测装置还包括:
23.如权利要求22所述的公交行驶状态的预测装置,所述判断模块用于若所述目标实时行驶速度在第一设定时间内持续小于第一设定阈值,则确定所述公交车辆位于所述信号交叉口周围且处于排队状态;和/或,
24.如权利要求22所述的公交行驶状态的预测装置,所述排队消散时间获取模块包括:
25.如权利要求24所述的公交行驶状态的预测装置,所述排队消散时间获取单元用于获取所述公交车辆通过所述信号交叉口的正常行驶车速、从排队状态加速至正常行驶车速所需的第一时长、绿灯开启后排队队伍中头车的启动反应时间;
26.一种信号控制装置,所述信号控制装置应用公交优先场景中,所述信号控制装置基于权利要求14-25中任一项所述的公交行驶状态的预测装置实现;
27.一种电子设备,包括:
28.一种存储有计算机指令的非瞬时计算机可读存储介质,其中,所述计算机指令用于使所述计算机执行根据权利要求1-12中任一项所述的方法,或权利要求13所述的方法。
29.一种计算机程序产品,包括计算机程序,所述计算机程序在被处理器执行时实现根据权利要求1-12中任一项所述的方法,或权利要求13所述的方法。
技术总结
本公开提供一种公交行驶状态的预测及信号控制方法、装置、设备与介质,涉及人工智能领域,尤其涉及自动驾驶、智能交通等技术领域;具体方案为:该方法包括:基于公交车辆的实时位置信息,获取公交车辆与信号交叉口的目标实时距离;根据目标实时距离计算得到公交车辆的平均行驶速度;采集公交车辆在当前时刻的第一实时行驶速度;基于平均行驶速度对第一实时行驶速度进行修正,以得到公交车辆在当前时刻的目标实时行驶速度;根据目标实时距离和目标实时行驶速度,获取公交车辆从当前时刻起至信号交叉口的初始行程时间;采用预设时间修正方式对初始行程时间进行修正,以得到目标行程预测时间。
技术研发人员:王浩,刘心宽,梅雨,凌玮岑,杨振通
受保护的技术使用者:阿波罗智联(北京)科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!