路况判定设备、路况判定方法和计算机可读存储介质与流程
本发明涉及一种用于车辆的路况判定设备、路况判定方法以及可用于执行这样的路况判定方法的计算机可读存储介质。
背景技术:
1、在如今智能化的悬架系统中通常会装备有半主动悬架或主动悬架,这对车辆的环境感知能力提出了较高要求,其需要车辆能够实时较精准地获知路况并且将其传输给悬架控制单元,以便悬架控制单元基于该路况信息实时调整悬架控制策略。考虑至此,一般给车辆搭载多个或尽可能多个高精度环境感知传感器,例如激光雷达传感器、光学摄像头等,这两者无疑都会增加车辆硬件成本。另外,针对高精度环境感知传感器的信号处理过程需要占用车辆较多的算力资源,尤其对于光学摄像头来说,其为了保证计算精度必须基于计算负荷较大的图像识别算法来感知地面凹凸情况。
技术实现思路
1、根据本发明的不同方面,旨在提供一种改善的路况判定设备、路况判定方法和用于执行这样的方法的计算机刻度存储介质,其中,该路况判定设备或方法能够在占用车辆较少的算力资源的情况下实现较精准的车辆行驶路况感知。
2、此外,本发明还旨在解决或者缓解现有技术中存在的其它技术问题。
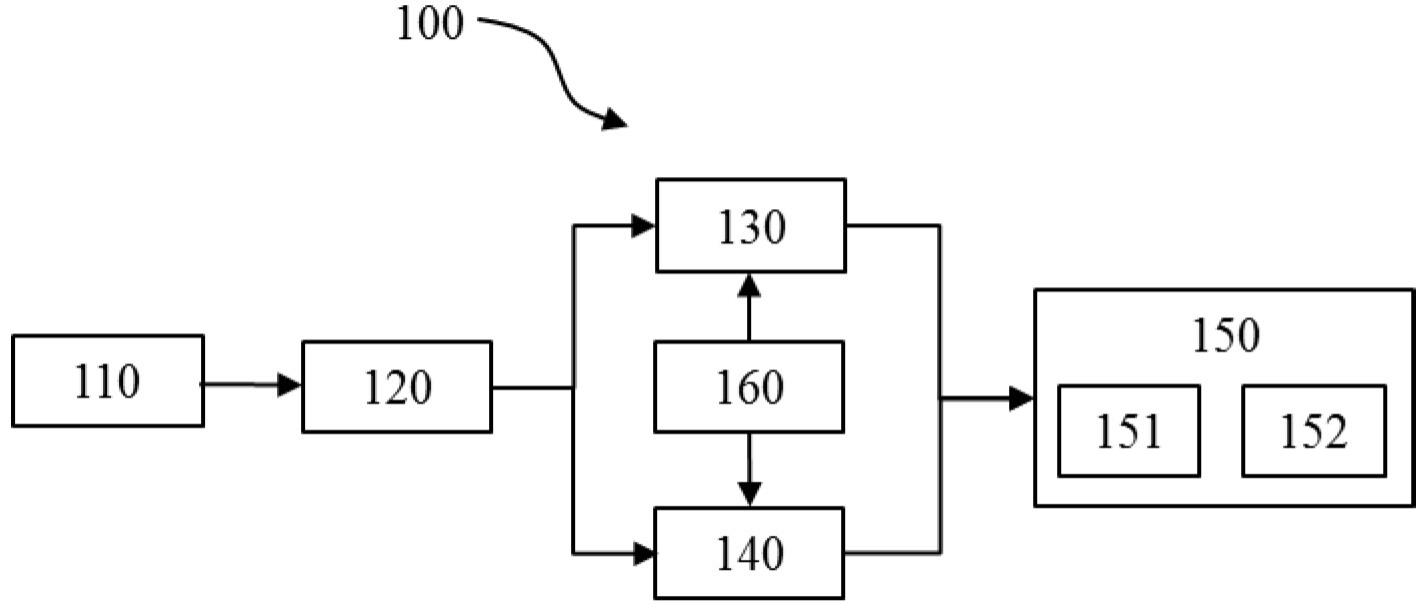
3、为了解决上述技术问题,根据本发明的一个方面提供一种路况判定设备,其包括:
4、获取模块,其配置成用于获取车辆各车轮的轮心垂向加速度信号;
5、预处理模块,其布置在所述获取模块的后级,并且配置成用于对所述轮心垂向加速度信号进行预处理以获得可表征其波动情况的初始判定信号;
6、高通滤波器,其布置在所述预处理模块的后级,并且配置成用于以高通滤波因子对所述初始判定信号进行高通滤波;
7、低通滤波器,其与所述高通滤波器并行地布置在所述预处理模块的后级,并且配置成用于以低通滤波因子对所述初始判定信号进行低通滤波;
8、确定模块,其配置成用于基于低通滤波后的初始判定信号以及高通滤波后的初始判定信号确定路况系数。
9、根据本发明的一方面所提出的路况判定设备,所述确定模块包括分析子模块和系数确定子模块,其中,所述分析子模块配置成用于通过傅里叶分析获得所述高通滤波后的初始判定信号的第一幅值和第一频率以及所述低通滤波后的初始判定信号的第二幅值和第二频率;所述系数确定子模块用于基于所述第一幅值和第一频率和所述第二幅值和第二频率确定路况系数。
10、根据本发明的一方面所提出的路况判定设备,所述获取模块与车辆数据总线连接并且从其中筛选出与路况关联的相关信号,所述获取模块基于所述相关信号求得各车轮的轮心垂向加速度信号,所述相关信号从如下组中选出:车身垂向加速度信号、减振器行程信号、惯性测量单元信号和车轮垂向加速度信号。
11、根据本发明的一方面所提出的路况判定设备,所述预处理模块包括附加低通滤波器,其配置成用于在所述初始判定信号输出到低通滤波器和高通滤波器之前以初始滤波因子对其进行低通滤波。
12、根据本发明的一方面所提出的路况判定设备,所述路况判定设备还包括滤波因子确定模块,其配置成用于基于车辆状态信号设定初始滤波因子、高通滤波因子和低通滤波因子,其中,所述车辆状态参数包括车速信号、车辆启动/停止信号。
13、根据本发明的一方面所提出的路况判定设备,所述滤波因子确定模块配置成根据如下公式确定初始滤波因子、高通滤波因子和低通滤波因子:
14、
15、其中,frqd为初始滤波因子;
16、hfrqd为高通滤波因子;
17、lfrqd为低通滤波因子;
18、v为车速;
19、kfrqd、khfrqd、klfrqd、frqdm、hfrqdm为预先设定的常数。
20、根据本发明的另一方面,还提出一种可由上述路况判定设备执行的路面判定方法,其包括如下步骤:
21、s100:获取各车轮的轮心垂向加速度信号以及可表征其波动情况的初始判定信号;
22、s200:以预设的高通滤波因子对所述初始判定信号进行高通滤波,并且以预设的低通滤波因子对所述初始判定信号进行低通滤波;
23、s300:基于高通滤波后的初始判定信号以及经低通滤波后的初始判定信号,确定路况系数。
24、根据本发明的另一方面所提出的路况判定方法,步骤s100包括如下子步骤:
25、s110:获取每一时刻的各轮心垂向加速度信号分别相对于在预设时间段内的平均轮心垂向加速度信号的偏差值;
26、s120:以预设的初始滤波因子对所述偏差值进行低通滤波,以生成所述初始判定信号。
27、根据本发明的另一方面所提出的路况判定方法,步骤s300包括如下子步骤:
28、s310:借助傅里叶分析,分别获取所述高通滤波后的初始判定信号的第一幅值和第一频率,并且获取所述低通滤波后的初始判定信号的第二幅值和第二频率;
29、s320:找寻位于车辆同侧的各同侧车轮的第一幅值、第一频率、第二幅值和第二频率并基于其分别确定车辆各侧的侧向路况系数;
30、s330:求得所述车辆各侧的侧向路况系数的加权平均值,作为路况系数。
31、根据本发明的另一方面所提出的路况判定方法,子步骤s320包括如下步骤:
32、s321:获取各同侧车轮各自的第一幅值与第二幅值的幅值平均值,并且获取所述各同侧车轮各自的第一频率与第二频率的频率平均值;
33、s322:求得各同侧车轮的幅值平均值与彼此的加权平均值,作为幅值加权值;并且求得各同侧车轮的频率平均值与彼此的加权平均值,作为频率加权值;
34、s323:计算所述幅值加权值与频率加权值的乘积的均方根,作为侧向路况系数。
35、最后,根据本发明的再一方面还提出一种计算机可读存储介质,在其上存储有计算机程序,其中,所述计算机程序被处理器执行时实现上面所阐述的类型的路况判定方法。
36、根据本公开的路况判定方法基于传感器信号能够以较低计算负荷得到路况系数,这能够在一定程度上降低车辆软硬件成本,另一方面通过同时保留各轮心垂向加速度信号的高频特性和低频特性,能够较贴近车辆的真实行驶状况。
技术特征:
1.一种路况判定设备,其特征在于,包括:
2.根据权利要求1所述的路况判定设备,其特征在于,所述确定模块包括分析子模块和系数确定子模块,其中,所述分析子模块配置成用于通过傅里叶分析获得所述高通滤波后的初始判定信号的第一幅值和第一频率以及所述低通滤波后的初始判定信号的第二幅值和第二频率;所述系数确定子模块用于基于所述第一幅值和第一频率和所述第二幅值和第二频率确定路况系数。
3.根据权利要求1所述的路况判定设备,其特征在于,所述获取模块与车辆数据总线连接并且从其中筛选出与路况关联的相关信号,所述获取模块基于所述相关信号求得各车轮的轮心垂向加速度信号,所述相关信号从如下组中选出:车身垂向加速度信号、减振器行程信号、惯性测量单元信号和车轮垂向加速度信号。
4.根据权利要求1至3中任一项所述的路况判定设备,其特征在于,所述预处理模块包括附加低通滤波器,其配置成用于在所述初始判定信号输出到低通滤波器和高通滤波器之前以初始滤波因子对其进行低通滤波。
5.根据权利要求4所述的路况判定设备,其特征在于,所述路况判定设备还包括滤波因子确定模块,其配置成用于基于车辆状态信号设定初始滤波因子、高通滤波因子和低通滤波因子,其中,所述车辆状态参数包括车速信号、车辆启动/停止信号。
6.根据权利要求5所述的路况判定设备,其特征在于,所述滤波因子确定模块配置成根据如下公式确定初始滤波因子、高通滤波因子和低通滤波因子:
7.一种路况判定方法,其可由根据权利要求1至6中任一项所述的路况判定设备来执行,其特征在于,包括如下步骤:
8.根据权利要求7所述的路况判定方法,其特征在于,步骤s100包括如下子步骤:
9.根据权利要求7或8所述的路况判定方法,其特征在于,步骤s300包括如下子步骤:
10.根据权利要求9所述的路况判定方法,其特征在于,子步骤s320包括如下步骤:
11.一种计算机可读存储介质,在所述计算机可读存储介质上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现根据权利要求7至10中任一项所述的路况判定方法。
技术总结
本发明涉及一种路况判定设备、路况判定方法和计算机可读存储介质,其中,该路况判定设备包括获取模块,其配置成用于获取车辆各车轮的轮心垂向加速度信号;预处理模块,其布置在所述获取模块的后级,并且配置成用于对所述轮心垂向加速度信号进行预处理以获得可表征其波动情况的初始判定信号;高通滤波器,其布置在所述预处理模块的后级,并且配置成用于以高通滤波因子对所述初始判定信号进行高通滤波;低通滤波器,其与所述高通滤波器并行地布置在所述预处理模块的后级,并且配置成用于以低通滤波因子对所述初始判定信号进行低通滤波;确定模块,其配置成用于基于低通滤波后的初始判定信号以及高通滤波后的初始判定信号确定路况系数。
技术研发人员:张丁之,栾帅奇,洪宗洲,张政,王峰,申震,李徐钢,张燕
受保护的技术使用者:蔚来汽车科技(安徽)有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!