用于为自动驾驶车辆规划变道操作的方法与流程
本发明涉及一种用于为自动驾驶车辆规划从车道到外车道的变道操作以便为即将驶离多车道路段作准备的方法,其中该车辆在数据技术方面耦合或能够耦合到中央计算机单元。
背景技术:
1、从de 10 2019 005 446 b3已知一种用于将车辆从合流车道自动并入到车道上的方法。该方法规定,预先确定首要并道位置,车辆应当在该位置处从合流车道变换至车道。如果位于或接近首要合流位置处的车道变换不会对车道上的道路使用者造成任何阻碍,则控制车辆在首要合流位置处执行变道。如不然,则在次要合流位置处执行变道,该次要合流位置根据检测到的车道上的道路使用者之间的自由空间来确定。
2、另外,de 10 2017 221 104 a1描述了一种用于协调车辆集合中的至少两辆自主或半自主车辆之间的至少一个距离的方法,其中在该车辆集合前方的区域中登记有该至少两辆车辆所行驶的道路的至少一个入口和/或出口,当通过该入口和/或出口时,确定至少两辆车辆之间的视情况而定的最佳距离,在到达入口和/或出口之前,将至少两辆车辆之间的距离调整为该至少两辆车辆之间视情况而定的最佳距离,以所确定的至少两辆车辆之间的视情况而定的最佳距离通过入口和/或出口,在通过入口和/或出口后,重新确定至少两辆车辆之间的视情况而定的最佳距离,并且在通过入口和/或出口后,将至少两辆车辆之间的距离调整为重新确定的该至少两辆车辆之间视情况而定的最佳距离。
技术实现思路
1、本发明的目的是提出一种用于为自动驾驶车辆规划变道操作的方法。
2、根据本发明,该目的通过一种具有权利要求1所述特征的方法来实现。
3、本发明的有利的设计方案是从属权利要求的主题。
4、一种用于为自动驾驶车辆规划从车道到外车道的变道操作以便为即将驶离多车道路段作准备的方法,其中该车辆在数据技术方面耦合或能够耦合到中央计算机单元,根据本发明规定,借助于该中央计算机单元接收表示多车道路段上的局地交通量的交通数据。此外,借助于该中央计算机单元,从车队(fahrzeugflotte)中的其他自动驾驶车辆接收关于规划的和完成的自动变道操作的变道数据,并且借助于该中央计算机单元,基于接收到的交通数据和接收到的变道数据来确定在当前交通量下能够在特定位置处执行车辆的自动变道操作的概率。
5、特别是在高速公路上,在右行交通的情况下,外车道理解为右侧车道,在左行交通的情况下,外车道理解为左侧车道。
6、因此,通过使用本方法确定自动驾驶车辆发起变道操作以变换到外车道的位置,从而可以在符合法律要求和技术限制的情况下驶离高速公路。
7、借助于本方法,可以改善交通流量,因为自动驾驶车辆通过该方法及时执行变道操作以驶离相应的高速公路。这意味着相应的自动驾驶车辆不必利用相对较短的时间空档或者乘员(即,驾驶员)不必手动操作车辆就能及时到达高速公路出口。如果采用本方法,可以提高交通安全性和驾驶舒适性。
8、与基于车辆间通信的解决方法相比,根据本发明的方法基本上独立于其他道路使用者的行为。由此可以降低技术复杂性以及对其他车辆制造商和/或道路使用者的合作依赖性。
9、特别是,使用本方法可以使自动驾驶车辆能够更容易在出口处离开高速公路,例如通过提前并入外车道。这种相对较早的并入外车道的位置例如可以从在没有驾驶员干预的情况下经由出口成功离开高速公路的自动驾驶车辆的车队中确定。此外,可以从车队中确定人类驾驶员通常变换到外车道以便在出口处驶离高速公路的位置。由于自动驾驶车辆的技术限制,则也可以将发起自动车辆的变道操作的位置确定在出口前的可参数化的更大距离处,例如出口前300米。
10、换句话说,本方法用于基于对联网的其他自动驾驶车辆在高速公路出口处的变道操作的时空研究、借助于中央计算机单元的服务显著降低错过出口的风险并提高变道操作中的安全性和驾驶舒适度。基于变道数据和交通数据,可以动态地确定变道操作的时间点。
11、在本方法的一个实施方案中,由车队中的其他自动驾驶车辆传输到中央计算机单元的变道数据包含由车队中的其他自动驾驶车辆传输到中央计算机单元的变道位置信息和变道成功信息。因此,其他车辆的变道数据包含足够的信息来确定适合自动驾驶车辆发起变道操作的位置,从而使车辆可以尽可能无风险地利用下一个出口。特别是,基于现有的变道数据来选择位置,使得变道操作不会突然发起,而是适应交通状况逐渐地发起,从而在变道操作之前和期间不会损害车辆乘员的驾驶舒适度。
12、本方法的一个实施方案规定,变道位置信息用于指示车队中相应的其他自动驾驶车辆发起变道操作的位置。因此,变道数据包含关于相应的其他自动驾驶车辆为了从其当前车道变换到外车道,确切地在何处发起其变道操作的信息。
13、在另一实施方案中,变道成功信息用于指示车队中相应的其他自动驾驶车辆的变道操作是否被成功地执行或者是否必须提前中断,例如因为向驾驶员发出了与车辆的驾驶任务相关的接管请求。基于所确定的成功执行的变道操作的空间分布,可以确定变道操作的开始(即,发起)位置,特别是卫星支持地检测到的位置。特别是确定了能够以可参数化的概率在高速公路出口之前成功执行自动变道操作的位置。
14、在本方法的另一实施方式中,根据自动驾驶车辆的方向指示灯的开启来识别变道操作的发起。其中,方向指示灯的开启用作变道操作的开始,并且触发将变道数据传输到中央计算机单元。各个其他自动驾驶车辆的变道操作的发起也根据方向指示灯的开启来识别。
15、为此,在另一可能的实施方案中,在开启方向指示灯的时间点记录车辆和各个其他车辆的当前位置并将其传输至中央计算机单元。该当前位置和时间点则被视为发起自动驾驶车辆的变道操作的确定的时空位置。
16、在本方法的一个可能的实施方案中,借助于交通服务和/或导航服务将交通数据特别是连续地、至少以规则的时间间隔传输到中央计算机单元。因此,中央计算机单元始终具有较为当前的交通数据,该交通数据用于确定可以执行变道操作以利用下一个出口的位置。
17、此外,在本方法的一个扩展方案中,在确定是否能够在当前交通量下在特定位置处执行车辆的自动变道操作时,将
18、-车辆周围环境中的天气条件,
19、-车辆周围环境中的能见度条件,
20、-车辆周围环境中的堵塞/封锁和/或
21、-动态交通信息
22、纳入考虑。由此,根据车辆的环境条件调整所确定的位置,以便能够执行安全且舒适的变道操作。
23、另外,在一个实施方案中,基于来自车队的数据专门针对每个出口确定可能的驶离操作的容量需求,并且根据所确定的容量需求调整发起变道操作的位置。
技术特征:
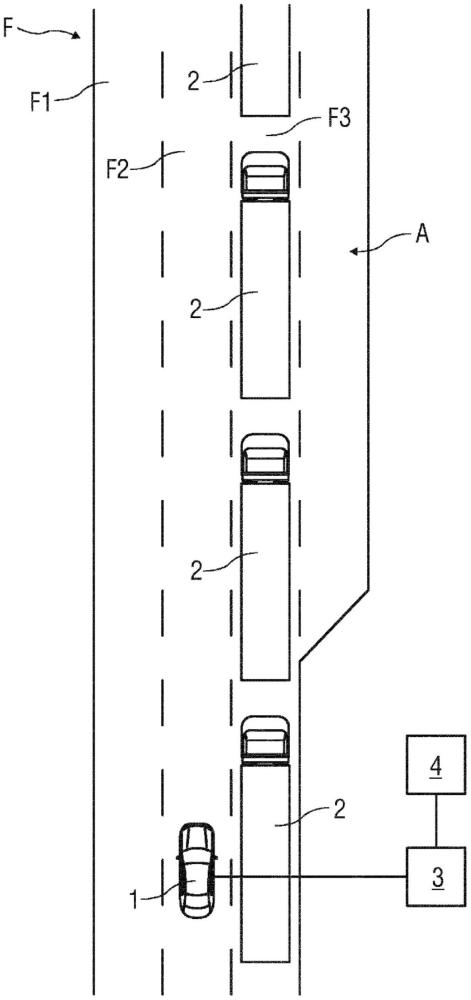
1.一种用于为自动驾驶车辆(1)规划从车道(f1,f2)到外车道(f3)的变道操作以便为即将驶离多车道路段(f)作准备的方法,其中所述车辆(1)在数据技术方面耦合或能够耦合到中央计算机单元(3),
2.根据权利要求1所述的方法,
3.根据权利要求2所述的方法,
4.根据权利要求2或3所述的方法,
5.根据前述权利要求中任一项所述的方法,
6.根据权利要求5所述的方法,
7.根据前述权利要求中任一项所述的方法,
8.根据前述权利要求中任一项所述的方法,
9.根据前述权利要求中任一项所述的方法,
10.根据权利要求9所述的方法,
技术总结
本发明涉及一种用于为自动驾驶车辆(1)规划从车道(F1,F2)到外车道(F3)的变道操作以便为即将驶离多车道路段(F)作准备的方法,其中车辆(1)在数据技术方面耦合或能够耦合到中央计算机单元(3)。根据本发明提供,‑借助于中央计算机单元(3)接收表示多车道路段(F)上的局地交通量的交通数据,‑借助于中央计算机单元(3),从车队中的其他自动驾驶车辆接收关于规划的和完成的自动变道操作的变道数据,并且‑借助于中央计算机单元(3),基于接收到的交通数据和接收到的变道数据来确定在当前交通量下能够在特定位置处执行车辆(1)的自动变道操作的概率。
技术研发人员:J·帕齐亚,H·雷伯恩
受保护的技术使用者:梅赛德斯-奔驰集团股份公司
技术研发日:
技术公布日:2024/9/5
- 还没有人留言评论。精彩留言会获得点赞!