移动预测装置、移动预测方法以及移动预测程序与流程
本公开涉及移动预测装置、移动预测方法以及移动预测程序。
背景技术:
1、在人和自主移动机器人(以下还有时总称为移动体)混合存在的环境中,自主移动机器人需要以避免与自主移动机器人以外的移动体即其他移动体碰撞或者追踪其他移动体的方式安全并且高效地移动。为了实现此,控制自主移动机器人的系统需要通过测量并预测在自主移动机器人周边存在的其他移动体的移动来使自主移动机器人的移动高效化。
2、此外,在人等其他移动体的复杂的移动的预测中,有时使用机器学习。例如,在专利文献1中,记载了通过将由搭载于自主移动机器人的传感器测量的测量信息作为输入来进行机器学习而检测其他移动体或者预测其他移动体的移动的技术。
3、现有技术文献
4、专利文献
5、专利文献1:日本特开2020-135901号公报
技术实现思路
1、然而,在专利文献1的技术中,关于由自主移动机器人的传感器提供的测量信息,实质上原样地进行机器学习。因此,存在难以不变更在机器学习中使用的模型而进行传感器的种类的变更以及外部传感器的追加等传感器的结构的变更这样的问题。
2、因此,本公开是鉴于如上述的问题而完成的,其目的在于,提供一种即使不变更在机器学习中使用的模型也能够变更传感器的结构的技术。
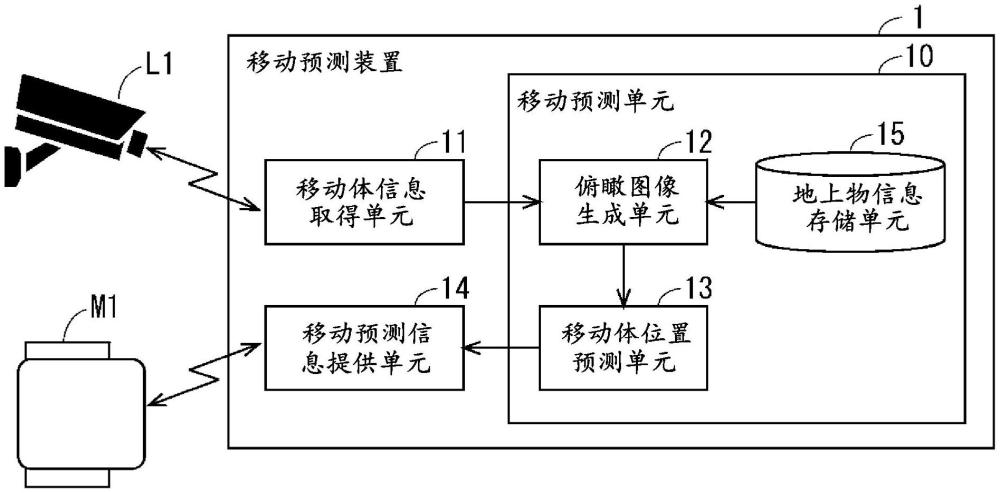
3、本公开所涉及的移动预测装置具备:信息取得单元,取得包括移动体的位置信息的移动体信息;俯瞰图像生成单元,根据所述移动体信息,生成通过表示所述移动体的图形即移动体图形来图示所述移动体的位置关系的俯瞰图像;以及移动体位置预测单元,对所述俯瞰图像的时间序列使用机器学习来预测所述移动体的将来位置。
4、根据本公开,根据移动体信息,生成图示移动体的位置关系的俯瞰图像,对俯瞰图像的时间序列使用机器学习来预测移动体的将来位置。根据这样的结构,即使不变更在机器学习中使用的模型,也能够变更传感器的结构。
5、本公开的目的、特征、方面以及优点通过以下的详细说明和附图将变得更加明确。
技术特征:
1.一种移动预测装置,具备:
2.根据权利要求1所述的移动预测装置,其中,
3.根据权利要求1或者2所述的移动预测装置,其中,
4.根据权利要求1至3中的任意一项所述的移动预测装置,其中,
5.根据权利要求4所述的移动预测装置,其中,
6.根据权利要求5所述的移动预测装置,其中,
7.根据权利要求1至3中的任意一项所述的移动预测装置,其中,
8.根据权利要求2所述的移动预测装置,其中,
9.根据权利要求8所述的移动预测装置,其中,
10.根据权利要求1至5中的任意一项所述的移动预测装置,其中,
11.一种移动预测方法,具备:
12.一种移动预测程序,使计算机执行:
技术总结
其目的在于提供一种即使不变更在机器学习中使用的模型也能够变更传感器的结构的技术。移动预测装置具备:信息取得单元,取得包括移动体的位置信息的移动体信息;俯瞰图像生成单元,根据移动体信息,生成通过表示移动体的图形即移动体图形来图示移动体的位置关系的俯瞰图像;以及移动体位置预测单元。移动体位置预测单元对俯瞰图像的时间序列使用机器学习来预测移动体的将来位置。
技术研发人员:安达佳明,五十岚雄治,山口弘纯,东野辉夫
受保护的技术使用者:三菱电机株式会社
技术研发日:
技术公布日:2025/4/7
- 还没有人留言评论。精彩留言会获得点赞!