一种基于时空格兰杰因果的交通流预测方法
本发明属于交通流预测,尤其涉及一种基于时空格兰杰因果的交通流预测方法。
背景技术:
1、随着智能交通系统的不断发展,作为智能交通系统重要功能之一的交通预测得到了越来越多的关注。交通预测属于时间序列预测任务中的一种,需要根据交通传感器记录的历史交通数据对未来时刻的交通数据进行预测,包括流量预测、流速预测和高峰期预测等,能够为城市管理、交通规划、路径优化等决策提供帮助。
2、交通预测任务的基本假设是交通数据背后隐含着某种稳定的模式,因而可以从历史数据中发现这种模式并用于未来时刻的预测,近年来大量交通预测的研究涌现。基于统计学的方法最早被应用,包括历史平均值(historical average,ha)、向量自回归(vectorautoregression,var)、整合移动平均自回归(autoregressive integrated movingaverage,arima)模型、卡尔曼滤波模型(kalman filtering model)等。随着深度学习的发展,前馈神经网络模型(feed forward neural network)深度信念网络(deep beliefnetwork,dbn)等回归模型被用于交通流预测,循环神经网络(recurrent neural network,rnn)及其变体长短时记忆网络(lstm)和门控循环单元(gated recurrent unit,gru)也被用于对交通流数据的时间依赖性建模。然而,上述方法仅仅建模了交通流数据的时间依赖性,却忽略了不同路网节点间的空间依赖关系。现有的观点普遍认为,交通预测任务不同于一般的时间序列预测任务,除了趋势性、周期性等时间动态模式的捕捉外,路网结构约束下的空间依赖关系更加重要。
3、为捕捉空间依赖关系,基于卷积神经网络(convolutional neural network,cnn)的模型被用于对路网节点的空间依赖性建模,然而这种模型只适用于欧几里德数据,不适用于非欧的路网数据。因此,能够对离散化的非规则数据进行表示的图神经网络(graphneural network,gnn)被用于对复杂路网进行建模,已经成为交通预测事实上的经典模型。这类方法主要从静态的路网拓扑结构中抽象出一种节点间局部的连接关系并建模为空间图输入到gnn结构中,通过gnn的消息传播机制实现交通信息在节点间的流动,比如时序图卷积网络(temporal graph convolutional network,t-gcn)、graph wavenet、时空图卷积网络(spatio-temporal graph convolutional networks,stgcn)等,也有方法考虑了空间依赖关系在时间轴上的效应,将空间图与时间图组合输入到gnn结构中,如stsgcn、stfgnn和stgode。
4、空间依赖关系的本质在于精确描述路网节点间的交通信息如何传递,即交通信息的传递如何受其他路网节点的影响。然而,微观交通工具的移动行为具有非常大的不确定性,使得追踪和预测交通信息在路网中的传递具有固有的困难,尤其是在长时预测时,交通信息的传递是一个全局的、动态的过程,空间图所刻画的静态的、局部的空间依赖关系无法表达路网节点间全局的、动态的交通信息(global-dynamic traffic information,gdti)的传递。如何建模gdti在路网中的传递,并通过gnn的消息传播机制对未来时刻的交通信息进行预测,是长时预测中的关键问题。
技术实现思路
1、有鉴于此,本发明提出一种新的假设:gdti的传递在微观层次上具有强的不确定性,但是在宏观层次上表现为一种稳定的交通流传递的因果关系(transmitting causalrelationship,tcr),在全局、动态的交通流经过长时的传递中是可逼近的,且可以通过时空格兰杰因果来建模。基于这一假设,本发明提出了一种时空格兰杰因果对gdti的长时传递进行逼近,从而捕获长时预测所需的全局、动态的空间依赖关系。在此基础上,本发明提出了一种使用时空格兰杰因果图的图神经网络交通流预测框架(stgc-gnns),根据gdti的传递进行预测。
2、本发明公开的基于时空格兰杰因果的交通流预测方法,包括以下步骤:
3、全局动态交通信息gdti表达长时预测下路网的空间依赖关系,具体表现为交通流传递的因果关系tcr,将交通流传递的因果关系tcr建模为时空格兰杰因果关系图;
4、考虑全局动态交通信息gdti在传递时的时空耦合,根据时空对齐算法捕获tcr;所述时空对齐算法考虑tcr中因果关系从原因节点传递到结果节点的时间,根据路网中全局动态交通信息gdti全局传递的起始点的空间距离进行时间序列的对齐,建模tcr传递的时空滞后;
5、使用时空格兰杰因果检验方法从对齐后的时间序列中测试出哪两个节点间有gdti的传递,从而捕获动态交通流下稳定的tcr;
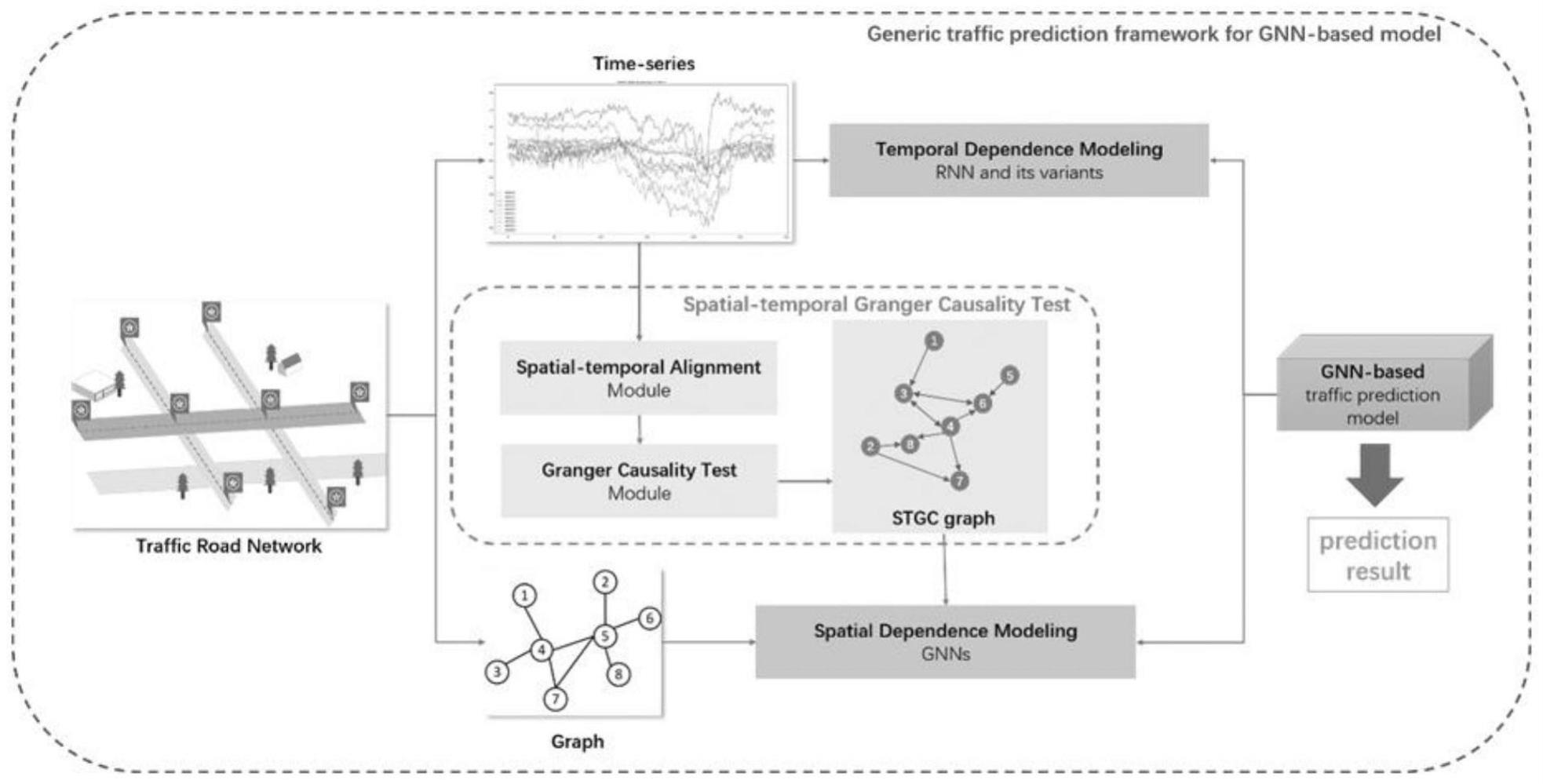
6、将得到的时空格兰杰因果检验图输入到基于gnn的交通预测模型中,同时捕获交通路网的时间依赖性和空间依赖性;所述基于gnn的交通预测模型包括两个模块,一个用于建模时间依赖性,一个使用gnn建模空间依赖性;其中,gnn结构传播和集成有空间依赖性的节点间的交通信息。
7、本发明的有益效果如下:
8、提出了一种时空格兰杰因果来建模tcr,这种因果关系能够表达一种全局、动态的空间依赖关系,能够捕获gdti从而提升长程预测效果。本发明首先通过时空对齐算法对tcr全局传递下的顺序性和滞后性进行建模,在此基础上使用格兰杰因果检验对节点间的tcr进行探测。
9、提出了一种使用时空格兰杰因果图的图神经网络交通流预测框架(stgc-gnns)用于提升长时预测效果,能够与所有使用空间图建模空间依赖关系的基于gnn的交通流预测模型相兼容。
10、在一个预测复杂性高的现实世界数据集上进行了性能对比实验,结果表现本发明的方法能够比骨干模型在45分钟和60分钟的长时预测上效果更好。可视化结果表明本发明能够在所有预测时长上提升对交通系统交叉点、边缘点和偏远点等具有高预测难度的点的预测,能够进一步验证本发明的有效性。
技术特征:
1.一种基于时空格兰杰因果的交通流预测方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,所述时空对齐算法是将源节点的时间序列沿着时间轴向后平移,步长等于源节点和目标节点间的时空滞后,所述时空滞后等于源节点与目标节点间的空间滞后与源节点的平均交通速度的比值;
3.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,所述因果滞后性为:结果发生和原因发生具有一个时间差,在交通路网中表现为原因节点和结果节点之间的时空滞后;
4.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,节点间的空间滞后是节点之间的空间距离,时空滞后是gdti从原因节点流向结果节点需要消耗的时间,即tcr传递需要的时间。
5.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,格兰杰因果检验方法建立的两个向量自回归模型如下:
6.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,
7.根据权利要求1所述的基于时空格兰杰因果的交通流预测方法,其特征在于,为了防止把长程时空依赖关系过滤掉,不通过距离阈值或拓扑相邻性来得到输入图,而是将节点间的距离建模为时空滞后并使用时空格兰杰因果检验对全局传递下的空间依赖关系进行检验;不直接使用数据集中的成本,所述成本表示不同节点间空间距离,而是计算路网中两个节点间最短距离并得到最小的成本;
技术总结
本发明公开了一种基于时空格兰杰因果的交通流预测方法,包括步骤:将交通流传递的因果关系TCR建模为时空格兰杰因果关系图;根据时空对齐算法捕获TCR;使用时空格兰杰因果检验方法从对齐后的时间序列中测试出哪两个节点间有GDTi的传递,从而捕获动态交通流下稳定的TCR;将得到的时空格兰杰因果检验图输入到基于GNN的交通预测模型中,同时捕获交通路网的时间依赖性和空间依赖性。本发明提出时空格兰杰因果来建模TCR,能表达一种全局、动态的空间依赖关系,能捕获GDTi从而提升长程预测效果;使用时空格兰杰因果图的图神经网络交通流预测框架用于提升长时预测效果。
技术研发人员:李海峰,贺丝露,罗琴瑶,时天冬
受保护的技术使用者:中南大学
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!