一种智能网联汽车车道级红绿灯信息获取方法与流程
本发明涉及车载显示交通信息,具体涉及一种智能网联汽车车道级红绿灯信息获取方法。
背景技术:
1、目前智能网联汽车仅依靠纯视觉的方式识别红绿灯信息容易受光照、天气、红绿灯形状和安装位置、遮挡等因素的影响,导致智能网联汽车无法实现红绿灯信息的百分之百准确识别。如果红绿灯信息一旦出现误识别或者漏识别,会导致智能网联汽车在行驶过程中出现闯红灯甚至与其他车辆发生碰撞的风险。
2、现有技术一中,车辆通过车载终端上的gps模块或北斗模块实现本车经纬度信息的获取;车辆通过车载终端上的无线通信模块接收红绿灯广播发送的各组红绿灯信息;车辆收到红绿灯信息后,结合本车的经纬度位置,通过红绿灯匹配方法,计算出本车行驶方向的红绿灯信息组;车辆取出该红绿灯信息组中的红/绿灯读数,开始语音播报或屏幕显示;并在车辆离开路口后,停止语音播报或屏幕显示。而现有技术一仅适用于红绿灯数量不大于4个的道路环境路口,如果路口单个方向上有两个及以上的红绿灯,则该方法无法获取实时的红绿灯信息。
3、现有技术二中,路侧单元rsu周期性的广播红绿灯信号,车载单元obu接收rsu广播的红绿灯信号,并将所述红绿灯信号转化为可视信号,将所述可视信号发送到led显示屏,用于显示路口的红绿灯状态信息。现有技术二无法实时获取车辆当前所在车道的红绿灯信息,如果车辆上只安装一个led显示屏只能顺次显示车辆的左转向红绿灯信息、右转向红绿灯信息、直行红绿灯信息。
技术实现思路
1、本发明的目的在于提供一种智能网联汽车车道级红绿灯信息获取方法,以实现智能网联汽车的红绿灯信息准确识别。
2、为解决上述技术问题,本发明提供了一种技术方案:一种智能网联汽车车道级红绿灯信息获取方法,该方法包括以下步骤,
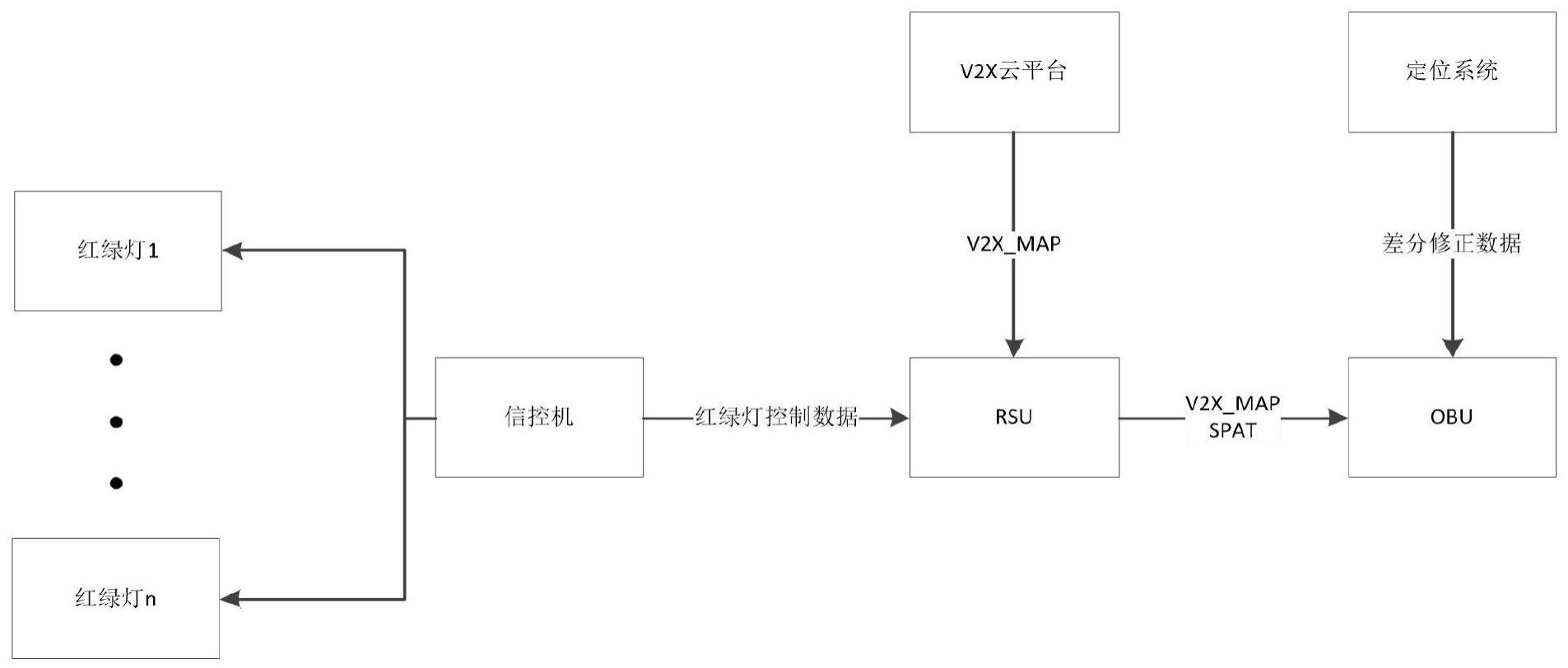
3、s1、v2x云平台根据采集得到的路口地图,编译生成v2x_map;
4、s2、v2x云平台将v2x_map发送至自车所在路口的路侧单元rsu;
5、s3、路侧单元rsu获取信控机的红绿灯控制数据并生成spat;
6、s4、路侧单元rsu建立spat中红绿灯编号phase_id与v2x_map中车道编号的对应关系,将建立了对应关系的spat与v2x_map发送至路侧单元rsu辐射范围内的车载单元obu;
7、s5、车载单元obu通过接收来自定位系统的差分修正数据并进行解算,得到自车的位置信息,而后根据自车的位置信息与v2x_map中的地图信息得到自车所在的车道编号;
8、s6、车载单元obu根据自车所在的车道编号得到对应的phase_id,根据spat得到该phase_id对应的灯色与倒计时信息;s7、显示终端根据车载单元obu输出的灯色与倒计时信息进行显示。
9、按上述方案,路口地图以及根据路口地图编译生成的v2x_map所包含的地图信息包括路口参考点的经纬度信息、车道编号、车道转向属性、上游车道与下游车道之间的连接关系、车道线经纬度信息、车道中心线经纬度信息、停止线经纬度信息、交通标志牌位置信息、红绿灯位置信息。
10、按上述方案,红绿灯控制数据包括各个红绿灯灯组的入口方向、红绿灯灯组的灯组类型、当前灯色以及倒计时数;spat包括红绿灯编号phase_id、各phase_id对应的当前灯色与倒计时信息。
11、按上述方案,s5中根据自车的位置信息与v2x_map中的地图信息得到自车所在车道的具体方法为,根据自车的位置信息与车道中心线经纬度信息,将与自车距离最近的车道中心线所在的车道作为自车所在车道,若当前时刻存在两条车道中心线与自车的距离相同,则以前一时刻的自车所在车道作为当前时刻的自车所在车道。
12、按上述方案,v2x_map中的车道中心线经纬度信息表示为沿车道中心线以一定间隔均匀分布的、具有不同经纬度的采样点;s5中根据自车的位置信息与v2x_map中的地图信息得到自车所在车道的具体方法为,将与自车距离最近的采样点所在的车道作为自车所在车道,若当前时刻存在两个采样点与自车的距离相同,则以前一时刻的自车所在车道作为当前时刻的自车所在车道。
13、按上述方案,当自车与路口参考点的距离s1、自车所在车道的停止线中心点与路口参考点的距离s2,满足s2-s1≥δs时,车载单元obu停止获取spat、v2x_map,显示终端停止显示灯色以及倒计时信息;其中δs为标定的预设值。
14、一种智能网联汽车车道级红绿灯信息获取系统,包括,
15、v2x云平台,用于根据采集得到的路口地图,编译生成v2x_map;
16、路侧单元rsu,用于获取信控机的红绿灯控制数据生成spat,并建立spat中红绿灯编号phase_id与v2x_map中车道编号的对应关系;
17、车载单元obu,用于接收来自定位系统的差分修正数据并进行解算,得到自车的位置信息,根据自车的位置信息与v2x_map中的地图信息得到自车所在的车道编号,进而根据自车所在的车道编号得到对应的phase_id,根据spat得到该phase_id对应的灯色与倒计时信息;
18、显示终端,用于对灯色与倒计时信息进行显示。
19、一种计算机设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现如上文所述的智能网联汽车车道级红绿灯信息获取方法的步骤。
20、一种计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上文所述的智能网联汽车车道级红绿灯信息获取方法的步骤。
21、一种汽车,其采用如上文所述的智能网联汽车车道级红绿灯信息获取方法获取红绿灯信息。
22、本发明的有益效果是:本发明可大幅度提高智能网联汽车红绿灯信息识别的准确率,且红绿灯识别的时延可降低到200ms以内,当智能网联汽车行驶向红绿灯路口时,可提前快速获取当前车道的红绿灯灯色和倒计时信息,进一步提升智能网联汽车的通行效率和行驶安全性。
技术特征:
1.一种智能网联汽车车道级红绿灯信息获取方法,其特征在于:该方法包括以下步骤,
2.根据权利要求1所述的智能网联汽车车道级红绿灯信息获取方法,其特征在于:路口地图以及根据路口地图编译生成的v2x_map所包含的地图信息包括路口参考点的经纬度信息、车道编号、车道转向属性、上游车道与下游车道之间的连接关系、车道线经纬度信息、车道中心线经纬度信息、停止线经纬度信息、交通标志牌位置信息、红绿灯位置信息。
3.根据权利要求1所述的智能网联汽车车道级红绿灯信息获取方法,其特征在于:红绿灯控制数据包括各个红绿灯灯组的入口方向、红绿灯灯组的灯组类型、当前灯色以及倒计时数;spat包括红绿灯编号phase_id、各phase_id对应的当前灯色与倒计时信息。
4.根据权利要求2所述的智能网联汽车车道级红绿灯信息获取方法,其特征在于:s5中根据自车的位置信息与v2x_map中的地图信息得到自车所在车道的具体方法为,根据自车的位置信息与车道中心线经纬度信息,将与自车距离最近的车道中心线所在的车道作为自车所在车道,若当前时刻存在两条车道中心线与自车的距离相同,则以前一时刻的自车所在车道作为当前时刻的自车所在车道。
5.根据权利要求2所述的智能网联汽车车道级红绿灯信息获取方法,其特征在于:v2x_map中的车道中心线经纬度信息表示为沿车道中心线以一定间隔均匀分布的、具有不同经纬度的采样点;s5中根据自车的位置信息与v2x_map中的地图信息得到自车所在车道的具体方法为,将与自车距离最近的采样点所在的车道作为自车所在车道,若当前时刻存在两个采样点与自车的距离相同,则以前一时刻的自车所在车道作为当前时刻的自车所在车道。
6.根据权利要求2智能网联汽车车道级红绿灯信息获取方法,其特征在于:当自车与路口参考点的距离s1、自车所在车道的停止线中心点与路口参考点的距离s2,满足s2-s1≥δs时,车载单元obu停止获取spat、v2x_map,显示终端停止显示灯色以及倒计时信息;其中δs为标定的预设值。
7.一种智能网联汽车车道级红绿灯信息获取系统,其特征在于:包括,
8.一种计算机设备,包括存储器、处理器以及存储在存储器上并可在处理器上运行的计算机程序,其特征在于:所述处理器执行所述计算机程序时实现权利要求1-6任一项所述的智能网联汽车车道级红绿灯信息获取方法的步骤。
9.一种计算机可读存储介质,其上存储有计算机程序,其特征在于:所述计算机程序被处理器执行时实现权利要求1-6任一项所述的智能网联汽车车道级红绿灯信息获取方法的步骤。
10.一种汽车,其特征在于:其采用权利要求1-6任一项所述的智能网联汽车车道级红绿灯信息获取方法获取红绿灯信息。
技术总结
本发明涉及一种智能网联汽车车道级红绿灯信息获取方法,包括以下步骤:V2X云平台根据采集得到的路口地图生成V2X_MAP,将其发送至路侧单元RSU;RSU获取信控机的红绿灯控制数据并生成SPAT,建立SPAT中红绿灯编号和V2X_MAP中车道编号的对应关系,并将其与V2X_MAP发送至车载单元OBU;OBU通过接收定位系统的差分修正数据得到自车位置信息,结合V2X_MAP中的地图信息确定自车行驶方向和所在车道编号,根据自车行驶方向和车道编号获取对应的红绿灯编号phase_ID,根据SPAT得到该phase_ID对应的灯色与倒计时信息,显示终端进行显示。该技术方案可实现智能交通系统的高效运行,提高道路通行效率和安全性,并为智能交通领域的进一步应用提供了技术支持。
技术研发人员:张辉,裴双红,程梁柱,季学文,庹新娟
受保护的技术使用者:东风汽车集团股份有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!