回转控制方法、系统、轨道机及电子设备与流程
本发明涉及轨道机,尤其涉及一种回转控制方法、系统、轨道机及电子设备。
背景技术:
1、轨道机主要用于铁路轨道枕木的更换,在其工作时,既需要保证轨道机的作业安全,还需不影响相邻轨道上车辆的正常行驶。
2、然而,目前针对轨道机可能存在的碰撞风险,主要是通过操作人员的操作来进行避免,这使得在面对轨道机的碰撞风险时,完全依赖于操作人员的经验和能力,因而,不仅提高了对操作人员的能力要求,还增加了操作难度,以及作业风险。
技术实现思路
1、本发明提供一种回转控制方法、系统、轨道机及电子设备,用以解决现有技术中因在轨道机存在碰撞风险时,需要通过人工操作来避免碰撞,所造成的操作麻烦,且安全系数低的问题。
2、本发明提供一种回转控制方法,包括:
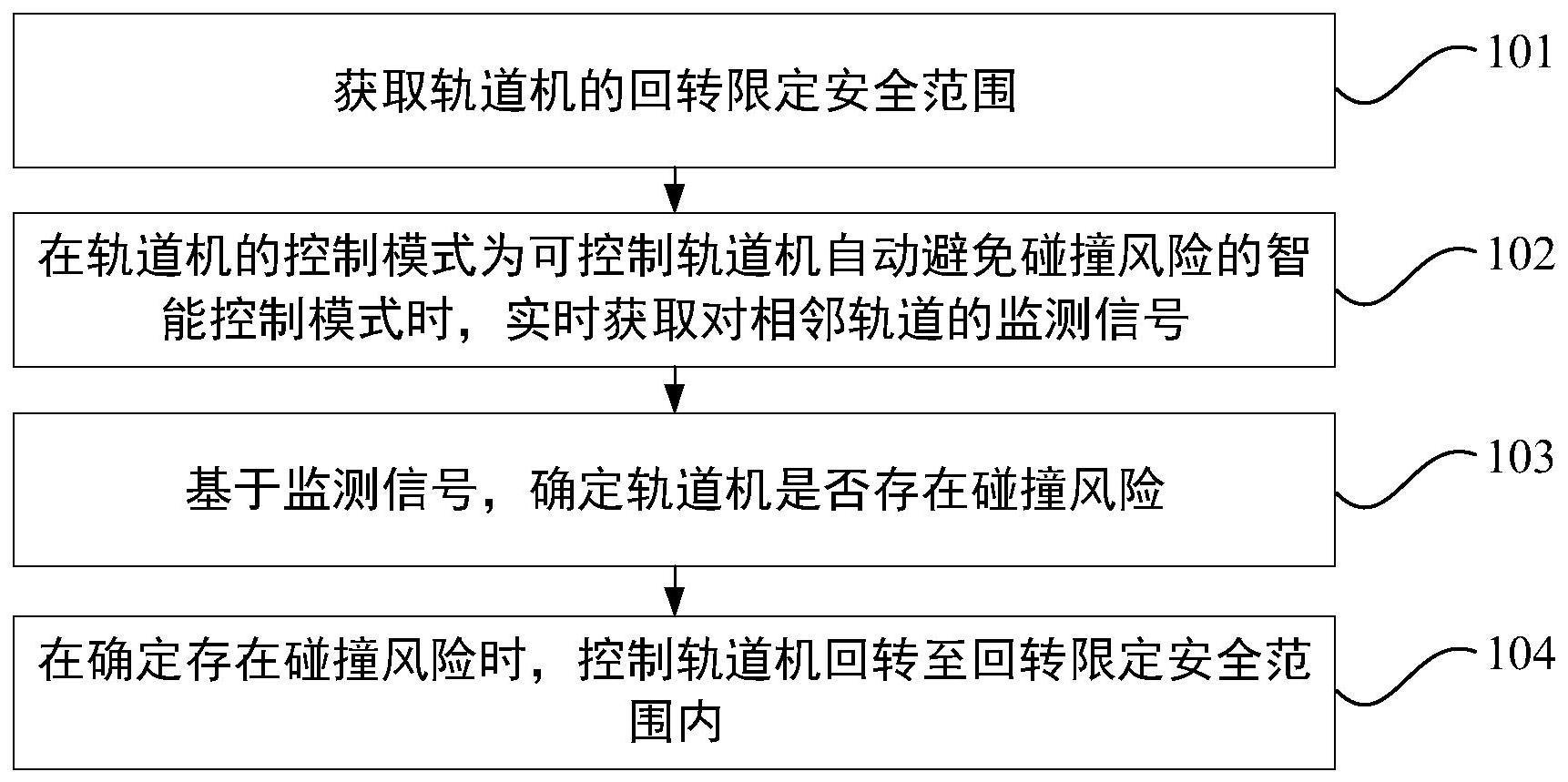
3、获取轨道机的回转限定安全范围;
4、在所述轨道机的控制模式为可控制所述轨道机自动避免碰撞风险的智能控制模式时,实时获取由安全监测模块采集的监测信号,所述碰撞风险为将有车辆由与所述轨道机作业的轨道相邻的轨道经过;
5、基于所述监测信号,确定所述轨道机是否存在所述碰撞风险;
6、在确定存在所述碰撞风险时,控制所述轨道机回转至所述回转限定安全范围内。
7、根据本发明所述的回转控制方法,所述获取轨道机的回转限定安全范围,包括:
8、触发回转起点设置操作提示信息;
9、将响应于所述回转起点设置操作提示信息后,所述轨道机的回转位置标记为回转起点位置;
10、触发回转终点设置操作提示信息;
11、将响应于所述回转终点设置操作提示信息后,所述轨道机的回转位置标记为回转终点位置。
12、根据本发明所述的回转控制方法,所述基于所述监测信号,确定所述轨道机是否存在所述碰撞风险,包括:
13、基于所述监测信号,确定在距离所述轨道机预设距离的范围内,所述相邻轨道上是否存在车辆;
14、在确定所述相邻轨道上存在所述车辆时,确定所述轨道机存在所述碰撞风险。
15、根据本发明所述的回转控制方法,所述在确定存在所述碰撞风险时,控制所述轨道机回转至所述回转限定安全范围内,包括:
16、获取所述轨道机的实时回转位置;
17、基于所述实时回转位置,确定所述轨道机是否处于所述回转限定安全范围内;
18、在所述轨道机处于所述回转限定安全范围外时,控制所述轨道机回转至所述回转限定安全范围内。
19、根据本发明所述的回转控制方法,还包括:
20、在所述轨道机的控制模式为控制所述轨道机自动作业的标定控制模式时,控制所述轨道机在所述回转限定安全范围限制的起点和终点间往复回转;
21、实时获取所述轨道机的回转位置;
22、基于所述轨道机的回转位置,确定所述轨道机是否处于所述回转限定安全范围外;
23、在确定所述轨道机处于所述回转限定安全范围外时,触发警报。
24、根据本发明所述的回转控制方法,所述在确定所述轨道机处于所述回转限定安全范围外时,触发警报,还包括:
25、基于所述轨道机的回转位置,确定所述轨道机的超限类型,所述超限类型包括:超出所述起点和超出所述终点;
26、基于所述轨道机的超限类型,关闭控制所述轨道机向相应方向回转的电磁阀。
27、本发明还提供一种回转控制系统,包括:
28、第一获取模块,用于获取轨道机的回转限定安全范围;
29、第二获取模块,用于在所述轨道机的控制模式为可控制所述轨道机自动避免碰撞风险的智能控制模式时,实时获取对相邻轨道的监测信号,所述相邻轨道为与所述轨道机作业的轨道相邻的轨道;
30、分析模块,用于基于所述监测信号,确定所述轨道机是否存在所述碰撞风险;
31、处理模块,用于在确定存在所述碰撞风险时,控制所述轨道机回转至所述回转限定安全范围内。
32、本发明还提供一种包括如上所述的回转控制系统的轨道机。
33、本发明还提供一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,所述处理器执行所述程序时实现如上述任一种所述的回转控制方法。
34、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如上述任一种回转控制方法。
35、本发明提供的一种回转控制方法、系统、轨道机及电子设备,通过获取轨道机的回转限定安全范围,并在轨道机的控制模式为可控制轨道机自动避免碰撞风险的智能控制模式时,实时获取对相邻轨道的监测信号,然后基于监测信号确定轨道机是否存在碰撞风险,并在确定存在碰撞风险时,控制轨道机回转至回转限定安全范围内,可以实现对轨道机是否存在碰撞可能的自动判断,以及在存在碰撞可能时对轨道机的作业姿态的自动控制,提高了轨道机的使用安全,还降低了操作人员的操作难度,提高了操作人员的工作效率。
36、通过以触发回转起点设置操作提示信息和回转终点设置操作提示信息的方式,进行回转限定安全范围的标定,使得操作人员可以根据提示实际操作轨道机进行回转起点位置和回转终点位置的标记,使得设置的回转限定安全范围可以保证轨道机的作业安全,即可以避免轨道机在设置的回转限定安全范围内动作时与其他活动物体发生碰撞,提高了通过基于回转限定安全范围对轨道机作业姿态进行自动调整以保证轨道机作业安全的有效性。
37、通过在轨道机的控制模式为标定控制模式时,控制轨道机在回转限定安全范围限制的起点和终点间往复回转,可以实现轨道机的自动作业,同时提高了轨道机在作业环境受限的区域内作业的作业效率。
技术特征:
1.一种回转控制方法,其特征在于,包括:
2.根据权利要求1所述的回转控制方法,其特征在于,所述获取轨道机的回转限定安全范围,包括:
3.根据权利要求1所述的回转控制方法,其特征在于,所述基于所述监测信号,确定所述轨道机是否存在所述碰撞风险,包括:
4.根据权利要求1所述的回转控制方法,其特征在于,所述在确定存在所述碰撞风险时,控制所述轨道机回转至所述回转限定安全范围内,包括:
5.根据权利要求1所述的回转控制方法,其特征在于,还包括:
6.根据权利要求5所述的回转控制方法,其特征在于,所述在确定所述轨道机处于所述回转限定安全范围外时,触发警报,还包括:
7.一种回转控制系统,其特征在于,包括:
8.一种轨道机,其特征在于,包括如权利要求7所述的回转控制系统。
9.一种电子设备,包括存储器、处理器及存储在所述存储器上并可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述程序时实现如权利要求1至6任一项所述的回转控制方法。
10.一种非暂态计算机可读存储介质,其上存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至6任一项所述的回转控制方法。
技术总结
本发明涉及挖掘机控制技术领域,提供一种回转控制方法、系统、轨道机及电子设备,其中方法包括:获取轨道机的回转限定安全范围;在轨道机的控制模式为可控制轨道机自动避免碰撞风险的智能控制模式时,实时获取对相邻轨道的监测信号,相邻轨道为与轨道机作业的轨道相邻的轨道;基于监测信号,确定轨道机是否存在碰撞风险;在确定存在碰撞风险时,控制轨道机回转至回转限定安全范围内。本发明用以解决现有技术中因在轨道机存在碰撞风险时,需要通过人工操作来避免碰撞,所造成的操作麻烦,且安全系数低的问题。
技术研发人员:周其,朱长远
受保护的技术使用者:三一重机有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!