一种针对道路行人的智能动态信号灯装置及控制方法
本发明属于交通相关人工智能技术中的智慧交通领域,尤其涉及一种针对道路行人的智能动态信号灯装置及控制方法。
背景技术:
1、现如今,人工智能技术发展迅速,人们不再局限于通过规则制定方案,更多的希望根据现实中不同的情况赋予不同的策略,感知与识别的应用,是人工智能技术落地的具体体现之一。
2、机器视觉是现在非常热门的研究领域,人脸识别、数字识别、自动驾驶中的感知系统,已经基本成熟,拥有一套可靠的解决方案,其中最核心的就是机器学习的引用,通过利用数据集多次的训练及纠正,让机器能够自己产生分辨的逻辑,即权重文件,通过这一权重,机器能够对一些未知的事物进行辨析,这是深度强化学习的基本逻辑,yolov5是一个非常成熟的机器视觉算法,随着计算机硬件的发展,对于数据的计算速度越来越快,应用场景愈发广泛,
3、在很多城市道路中的人行横道路口,规则要求驾驶员“礼让行人”,即如遇到有行人准备通过人行横道,车辆需要停止以等待行人通过,这在人员较为密集的时间段是低效的,例如早晚高峰时段,行人较为连续,若驾驶员一直遵守行人优先的原则,会导致汽车通行效率下降,且即使在非密集时段,只要有一位行人预通过则立刻停车,也会造成一定的追尾风险。
技术实现思路
1、本发明针对动态变化的行人流量,设计了一个智能动态交通信号灯装置,其可以通过摄像头识别正在等候通过人行横道的人数,从而显示不同的等待时常,若等候通过的行人较少,则等待时间设置稍长,若等候行人较多,则等待时间较短,同时向行人的道路车辆显示倒计时,以确保双方把握停留和通过的时间。
2、为了达到上述目的,本发明采取的技术方案如下:
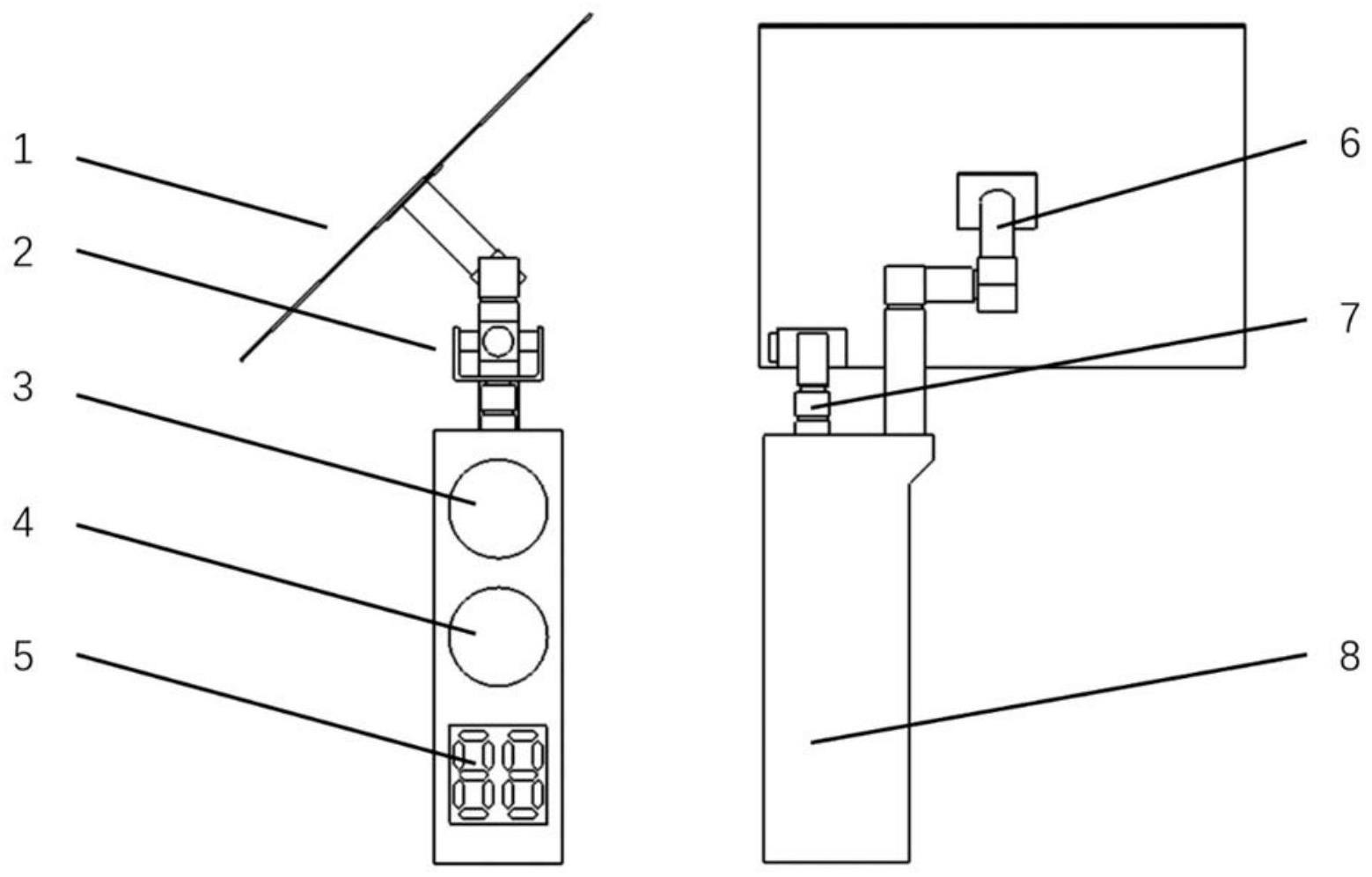
3、本发明首先提供了一种针对道路行人的智能动态信号灯装置,包括信号灯本体、设置在信号灯本体上方的摄像头和太阳能供电板以及设置在信号灯本体内部的主控单元;所述信号灯本体的一个侧面设置有红灯显示框、绿灯显示框以及倒计时数字显示框;所述摄像头用于实时拍摄道路行人以及车辆,并将拍摄结果输送给主控单元;所述主控单元为设置有处理器的控制板,主控单元中搭建有训练好的指定等候区行人数量识别的实时检测模型,主控单元处理拍摄结果并输出控制信号给信号灯本体;信号灯本体接收控制信号并根据控制信号控制红灯显示框和绿灯显示框的闪烁以及控制倒计时数字显示框显示的时间;所述太阳能供电板为整个智能信号灯装置进行供电。
4、作为本发明的优选方案,所述摄像头与信号灯本体之间设置有摄像头调节装置;摄像头调节装置实现摄像头三相角度的调整;所述太阳能供电板与信号灯本体之间设置有太阳能板调节机构;太阳能板调节机构实现太阳能供电板三相角度的调整;所述摄像头调节装置和太阳能板调节机构均为三相机械臂。
5、本发明还提供了一种上述智能信号灯装置的控制方法,包括以下步骤:
6、1)太阳能供电板吸收太阳能为智能信号灯装置供电;
7、2)摄像头通电后开启,摄像头对道路行人以及车辆进行拍摄,并将拍摄的照片输送给主控单元;
8、3)主控单元接受摄像头输送的照片,主控单元通过搭建在主控单元中的实时检测模型对照片中行人数量进行识别;主控单元根据识别的行人数量,计算此刻需要的信号灯显示颜色及时长,输出控制信号;
9、4)信号灯本体接收控制信号,并根据控制信号调节信号灯本体的显示状态。
10、作为本发明的优选方案,步骤3)中搭建在主控单元中的实时检测模型,具体搭建方式为:利用labellmg可视化图像标定工具对kitti图片数据库进行标定并整理为数据集;标定对象只选择其中的行人,标定的信息由索引标签、标定对象的中心坐标、标定对象的宽和高构成;基于yolov5的算法搭建模型;设置目标训练步长,使用数据集对模型进行训练,当模型训练的步长达到目标训练步长时后,则代表训练完成,得到训练好的模型;将训练好的模型嵌入到主控单元的控制板中,完成实时检测模型的搭建。
11、作为本发明的优选方案,步骤3具体为:
12、3.1)利用实时检测模型对照片中行人数量进行识别;
13、3.2)根据步骤3.1)识别的行人等待数量进行计算:
14、当没有行人等待时,保持显示红灯;
15、当检测到有行人正在等待之后,则进入红灯倒计时阶段,若道路没有车辆通过,则红灯倒计时5秒;若道路上有车辆通过,则遵循等候人数越多,倒计时长越短,具体设置如下:
16、
17、n:正在等待的行人数量
18、t1:红灯倒计时时长
19、t2:红灯结束后,绿灯时长;
20、3.3)将计算的结果转换为控制信号输出给信号灯本体。
21、作为本发明的优选方案,步骤4中倒计时的过程中,红灯显示框和绿灯显示框均以一个不断缩减的扇形显示。与现有技术相比,本发明具有以下有益效果:
22、1)本发明通过搭建对指定等候区行人数量识别的实时检测模型,实现精准的行人数量检测;
23、2)本发明利用一个根据人数而变化的红灯倒计时策略,让信号灯显示随着人数变化,从而提高路口效率。
24、3)本发明通过摄像头识别正在等候通过人行横道的人数,从而显示不同的等待时常,若等候通过的行人较少,则等待时间设置稍长,若等候行人较多,则等待时间较短,同时向行人的道路车辆显示倒计时,以确保双方把握停留和通过的时间。
技术特征:
1.一种针对道路行人的智能动态信号灯装置,其特征在于,包括信号灯本体、设置在信号灯本体上方的摄像头和太阳能供电板以及设置在信号灯本体内部的主控单元;所述信号灯本体的一个侧面设置有红灯显示框、绿灯显示框以及倒计时数字显示框;所述摄像头用于实时拍摄道路行人以及车辆,并将拍摄结果输送给主控单元;所述主控单元为设置有处理器的控制板,主控单元中搭建有训练好的指定等候区行人数量识别的实时检测模型,主控单元处理拍摄结果并输出控制信号给信号灯本体;信号灯本体接收控制信号并根据控制信号控制红灯显示框和绿灯显示框的闪烁以及控制倒计时数字显示框显示的时间;所述太阳能供电板为整个智能信号灯装置进行供电。
2.根据权利要求1所述的智能动态信号灯装置,其特征在于,所述摄像头与信号灯本体之间设置有摄像头调节装置;摄像头调节装置实现摄像头三相角度的调整;所述太阳能供电板与信号灯本体之间设置有太阳能板调节机构;太阳能板调节机构实现太阳能供电板三相角度的调整;所述摄像头调节装置和太阳能板调节机构均为三相机械臂。
3.一种如权利要求1所述智能信号灯装置的控制方法,其特征在于,包括以下步骤:
4.根据权利要求3所述智能信号灯装置的控制方法,其特征在于,步骤3)中搭建在主控单元中的实时检测模型,具体搭建方式为:利用labellmg可视化图像标定工具对kitti图片数据库进行标定并整理为数据集;标定对象只选择其中的行人,标定的信息由索引标签、标定对象的中心坐标、标定对象的宽和高构成;基于yolov5的算法搭建模型;设置目标训练步长,使用数据集对模型进行训练,当模型训练的步长达到目标训练步长时后,则代表训练完成,得到训练好的模型;将训练好的模型嵌入到主控单元的控制板中,完成实时检测模型的搭建。
5.根据权利要求3所述智能信号灯装置的控制方法,其特征在于,步骤3)具体为:
6.根据权利要求3所述智能信号灯装置的控制方法,其特征在于,步骤4中倒计时的过程中,红灯显示框和绿灯显示框均以一个不断缩减的扇形显示。
技术总结
本发明设计了一种针对道路行人的智能动态信号灯装置及控制方法,本发明方法利用YoloV5算法搭建了对等候区行人数量识别的实时检测系统;本发明方法利用Kitte数据集针对行人类别做了特殊的训练,得到了针对行人的权重文件,以提高行人检测的精准度;本发明方法设计的程序可以实时输出检测范围内的行人数量;本发明方法利用等待人数越多,则红灯等待时长越短这一基本策略,设计信号灯动态显示逻辑。本发明所产出的信号灯,能够在一定程度上适应城区道路中动态变化的人流量,提高行人与车辆的通行效率,增加安全性,能够很好地适应目前城市内早晚高峰时段的道路交通环境。
技术研发人员:俞小莉,王峥明,黄瑞,陈诺,陈云布,杨爱喜,陈俊玄,沈佳源,郅文彬,齐建斌
受保护的技术使用者:浙江大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!