一种基于车路协同感知的车辆引导方法
本发明属于车路协同,具体涉及一种基于车路协同感知的车辆引导方法。
背景技术:
1、随着城市化进程的加快,交通问题已成为影响城市可持续发展的主要因素之一。为了解决这些问题,智能交通系统成为了当今研究的热点之一。其中,车路协同技术被认为是智能交通的重要组成部分。
2、车路协同是指车辆与道路之间的信息交换和协同,旨在提高驾驶的安全性、效率和舒适性。通过车辆和道路设备之间的通信和数据共享,车路协同可以实现交通流量优化、智能驾驶、智慧路网等功能,从而提高城市交通的效率和安全性。同时,随着通信技术、传感器技术、数据处理技术等技术的不断发展,车路协同技术得到了快速发展。许多国家都开始大规模推广车路协同技术,并取得了良好的效果。尽管车路协同技术在智能交通中的应用取得了一定的成果,但仍然存在一些挑战。在不同的交通情况下,不同信息的权重将会有变化,如天气恶劣情况下摄像头的检测效果会减弱,车辆多的情况下v2v通信效果会比车辆少的情况下更好。
3、因此,亟需提供一种基于车路协同感知的车辆引导方法,通过融合复杂交通环境下的多源数据,实现有效且更加智能的车辆引导功能。
技术实现思路
1、为解决现有技术中存在的上述问题,本发明提供了一种基于车路协同感知的车辆引导方法,通过对多源数据的融合、计算和分析,得出在当前交通环境下对车辆的最优引导方法,并基于此引导车辆行驶,以实现不同交通场景下更为智能和安全的车辆引导。
2、本发明的目的可以通过以下技术方案实现:
3、本发明提供了一种基于车路协同感知的车辆引导方法,应用于车辆引导系统,所述车辆引导系统包括信息收集模块、数据融合模块和车辆引导模块;所述数据融合模块分别与信息收集模块和车辆引导模块之间建立数据通信;所述方法包括以下步骤:
4、s1、基础信息采集:通过信息收集模块收集基础信息并将其发送给数据融合模块;
5、s2、获取最优引导方法:通过数据融合模块首先根据实时交通环境动态分配点云信息和图像信息的权重并进行一次数据融合,再与车辆之间的通信信息进行二次数据融合,得出在当前环境下对车辆的最优引导方法;
6、s3、引导车辆行驶:通过车辆引导模块根据最优引导方法引导车辆行驶。
7、进一步地,所述步骤s1中,基础信息包括来自路侧和车载的摄像头的图像信息、来自路侧和车载的雷达的点云信息以及来自车辆之间的通信信息。
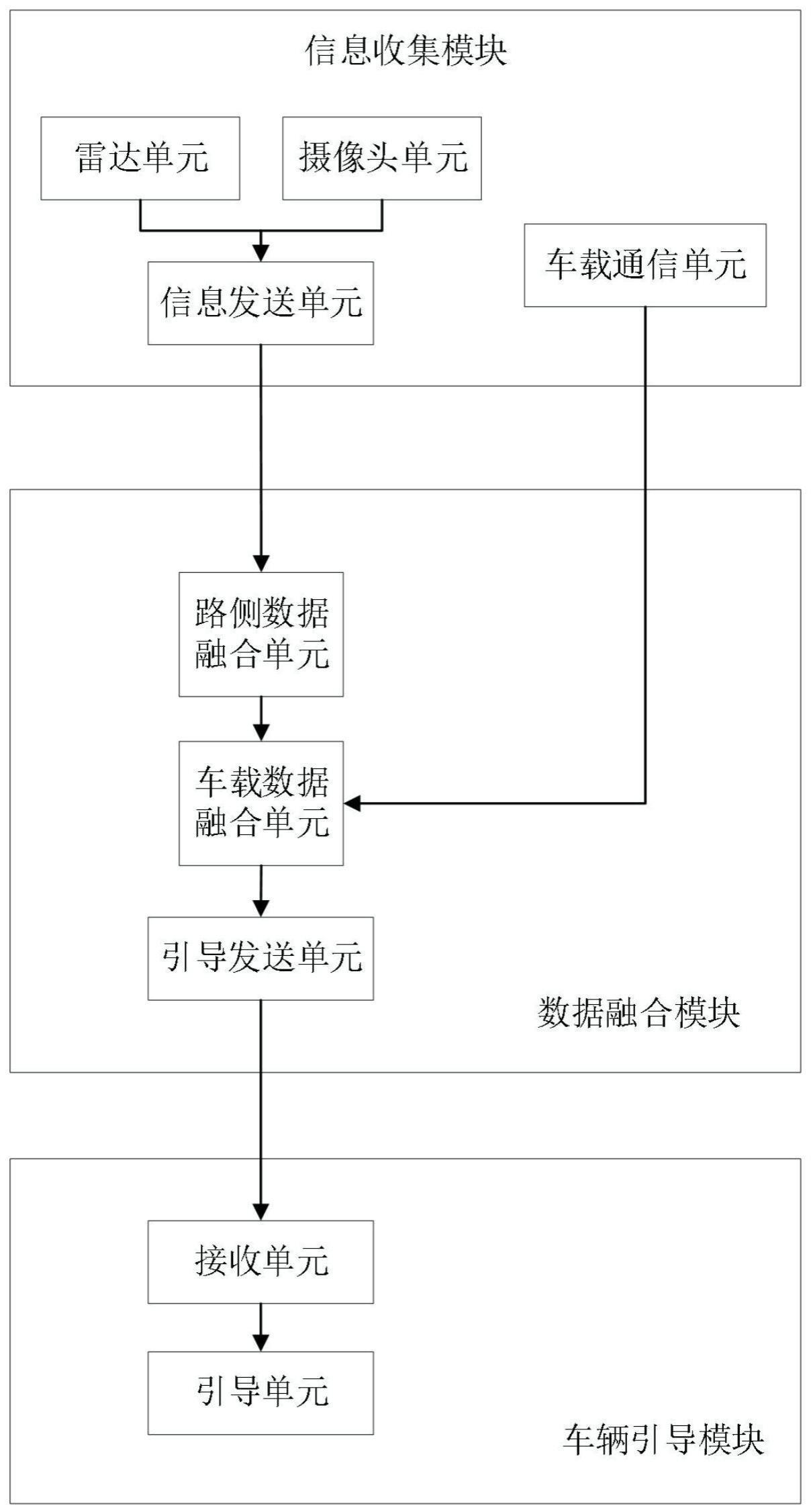
8、进一步地,所述步骤s1中,信息收集模块用于收集基础信息并将其发送给数据融合模块,所述信息收集模块包括雷达单元、摄像头单元、车载通信单元和信息发送单元。
9、进一步地,所述雷达单元,用于通过路侧和车载的雷达获取道路、车辆和其他交通参与者的点云信息;所述摄像头单元,用于通过路侧和车载摄像头获取道路、车辆和其他交通参与者的图像信息。
10、进一步地,所述车载通信单元,用于车辆之间进行环境信息交换;其中,环境信息包括道路、车辆和其他交通参与者的信息;所述信息发送单元将收集到的点云信息和图像信息发送到数据融合模块。
11、进一步地,所述步骤s2中,数据融合模块包括路侧数据融合单元、车载数据融合单元和引导发送单元。
12、进一步地,所述路侧数据融合单元,用于将雷达单元的数据和摄像头单元的数据进行一次数据融合,根据当前环境实际情况动态分配雷达单元点云数据和摄像头单元图像数据融合的权重,并将融合结果发送至车载数据融合单元。
13、所述车载数据融合单元,用于将接收来自路侧数据融合单元一次融合之后的数据与车辆之间的通信数据进行二次融合计算,得出在当前情况下对车辆的最优引导方法。
14、进一步地,所述步骤s3中,车辆引导模块包括接收单元和引导单元;
15、其中:
16、所述接收单元,用于获取引导发送单元传来的引导信息;
17、所述引导单元,用于根据引导信息对车辆驾驶进行引导。
18、本发明的有益效果为:
19、(1)本发明通过收集和融合来自路侧和车载的摄像头的图像信息、来自路侧和车载的雷达的点云信息、来自车辆之间的通信信息以更好观测道路上的交通状况,并提供当前环境中最适合车辆的引导方法,实现更安全、更高效的引导驾驶。
20、(2)本发明通过在路侧数据融合单元和车载数据融合单元融合数据,并且根据实际交通状况动态分配多源数据的权重,以提供更符合当前驾驶场景下的行驶决策,具有更强的实时性和安全性。
技术特征:
1.一种基于车路协同感知的车辆引导方法,其特征在于:应用于车辆引导系统,所述车辆引导系统包括信息收集模块、数据融合模块和车辆引导模块;所述数据融合模块分别与信息收集模块和车辆引导模块之间建立数据通信;所述方法包括以下步骤:
2.根据权利要求1所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述步骤s1中,基础信息包括来自路侧和车载的摄像头的图像信息、来自路侧和车载的雷达的点云信息以及来自车辆之间的通信信息。
3.根据权利要求1所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述步骤s1中,信息收集模块用于收集基础信息并将其发送给数据融合模块,所述信息收集模块包括雷达单元、摄像头单元、车载通信单元和信息发送单元。
4.根据权利要求3所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述雷达单元,用于通过路侧和车载的雷达获取道路、车辆和其他交通参与者的点云信息;所述摄像头单元,用于通过路侧和车载摄像头获取道路、车辆和其他交通参与者的图像信息。
5.根据权利要求4所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述车载通信单元,用于车辆之间进行环境信息交换;其中,环境信息包括道路、车辆和其他交通参与者的信息;所述信息发送单元将收集到的点云信息和图像信息发送到数据融合模块。
6.根据权利要求1所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述步骤s2中,数据融合模块包括路侧数据融合单元、车载数据融合单元和引导发送单元。
7.根据权利要求6所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述路侧数据融合单元,用于将雷达单元的数据和摄像头单元的数据进行一次数据融合,根据当前环境实际情况动态分配雷达单元点云数据和摄像头单元图像数据融合的权重,并将融合结果发送至车载数据融合单元;
8.根据权利要求1所述的一种基于车路协同感知的车辆引导方法,其特征在于:所述步骤s3中,车辆引导模块包括接收单元和引导单元;其中:
技术总结
本发明涉及一种基于车路协同感知的车辆引导方法,属于车路协同技术领域。应用于车辆引导系统,车辆引导系统包括信息收集模块、数据融合模块和车辆引导模块;所述方法包括:S1、通过信息收集模块收集基础信息并将其发送给数据融合模块;S2、通过数据融合模块首先根据实时交通环境动态分配点云信息和图像信息的权重并进行一次数据融合,再与车辆之间的通信信息进行二次数据融合,得出车辆的最优引导方法;S3、通过车辆引导模块根据最优引导方法引导车辆行驶。本发明通过对多源数据的融合、计算和分析,得出在当前交通环境下对车辆的最优引导方法,并基于此引导车辆行驶,以实现不同交通场景下更为智能和安全的车辆引导。
技术研发人员:陈睿,张蕗怡,胡晓鹏,高露,石海新,张金航
受保护的技术使用者:西安电子科技大学广州研究院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!