一种基于救护车的车载无人机救援系统及救护车
本发明涉及道路车辆的交通控制系统的,尤其涉及一种基于救护车的车载无人机救援系统及救护车。
背景技术:
1、在《道路交通安全法》第五十三条规定,警车、消防车、救护车、工程救险车执行紧急任务时,可以使用警报器、标志灯具;在确保安全的前提下,不受行驶路线、行驶方向、行驶速度和信号灯的限制,其他车辆和行人应当让行。
2、然而,在实际的行驶任务中,例如救护车在救援的路途中,需要执行安全快速的行驶任务,但是现有救护车在赶往救援地点的过程中,通常只能接收到医院总部的调度信息和结合互联网信息中的各个路况信息、导航信息,虽然能够得到一定的行车路线建议,但由于缺乏数字化技术,对道路上的实时信息难以进行处理,影响通行效率、行驶速度和行驶安全性。因此,亟需提供一种方案以改善上述问题。
技术实现思路
1、本发明的目的在于提供一种基于救护车的车载无人机救援系统及救护车,能够对车辆端周边各个车道上的车辆进行实时监控,并依据实时路边规划超车路线并指导通行,以利于车辆安全地超车通过,缩短行驶时间,特别是在高架、快速路、高速等没有行人或行人较少的道路上,能够明显提高车辆的通行效率、行驶速度和行驶安全性。
2、第一方面,本发明提供的一种基于救护车的车载无人机救援系统,采用如下的技术方案:
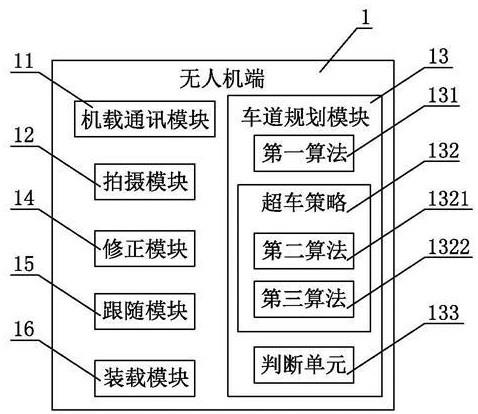
3、包括无人机端,所述无人机端用于与车辆端通信连接;
4、所述无人机端配置有拍摄模块和车道规划模块,所述拍摄模块用于获取并标记拍摄范围内的车辆影像以生成含有标记信息的第一图像,所述车道规划模块用于接收并处理所述第一图像以生成含有超车路线的超车指令,并将所述超车指令发送至所述车辆端;
5、所述车道规划模块配置有第一算法和超车策略,所述第一算法用于计算所述第一图像位于第一目标区域内的车辆行驶稳定性的稳定权重值,所述超车策略用于计算第二目标区域内的车辆与所述车辆端的间距,并结合所述稳定权重值以生成含有超车路线的超车指令;其中,所述第二目标区域为所述第一图像中靠近所述车辆端的区域,所述第一目标区域为所述第一图像除第二目标区域外的区域。
6、本发明提供的一种基于救护车的车载无人机救援系统的有益效果在于:在车辆行驶时,无人机端能够对车辆端周边各个车道上的车辆进行实时监控,并依据实时路边规划超车路线并指导通行,以利于车辆安全地超车通过,缩短行驶时间,特别是在高架、快速路、高速等没有行人或行人较少的道路上,能够明显提高车辆的通行效率。
7、可选地,所述超车策略配置有第一超车安全值、第二超车安全值、第二算法和第三算法;所述第二算法用于计算第一超车间距,所述第一超车间距为所述第一图像中,沿所述车辆端行驶方向,位于所述车辆端前方的前方车辆与位于所述前方车辆后侧车辆的间距;所述第三算法用于计算第二超车间距,所述第二超车间距为所述第一图像中,沿所述车辆端行驶方向,位于所述车辆端前方的前方车辆与位于所述前方车辆相邻车辆的垂直所述行驶方向的最小间距;所述第一超车间距用于与所述第一超车安全值进行比较,当所述第一超车间距大于或等于所述第一超车安全值时,所述超车策略发出所述超车指令;当所述第一超车间距小于所述第一超车安全值时,所述第二超车间距与所述第二超车安全值比较,当所述第二超车间距大于或等于所述第二超车安全值时,所述超车策略发出所述超车指令;当所述第二超车间距小于所述第二超车安全值时,所述超车策略生成等待指令,并将所述等待指令发送至所述车辆端。其有益效果在于:能够判断是否进行超车动作,并提高超车安全性。
8、可选地,所述超车策略配置有预设权重值,所述预设权重值用于与所述稳定权重值进行比较;当所述稳定权重值小于所述预设权重值时,所述超车策略生成所述等待指令,并将所述等待指令发送至所述车辆端。其有益效果在于:评估车道上行驶过程中各个车辆的驾驶稳定性,给予车辆端更优的超车路线和超车评估。
9、可选地,所述车辆道路规划模块中还配置有判断单元,所述判断单元用于在在具有多条超车路线的前提下,选取所述第一超车间距与所述第一超车安全值的差值,或所述第二超车间距与所述第二超车安全值差值最大的一条超车路线以发出超车指令。其有益效果在于:能够提高车辆端在进行超车时的通行安全性。
10、可选地,所述无人机端还配置有跟随模块,所述跟随模块用于所述无人机端跟随所述车辆端。
11、可选地,所述跟随模块获取所述车辆端的实时时速,并获取所述车辆端的行驶路线信息以跟随所述车辆端;所述行驶路线信息包括所述超车指令中的超车路线。
12、可选地,所述第一算法为:
13、;
14、其中,所述n为拍摄的所有画面帧,所述δ为车辆稳定权重值,所述hi为第i帧所述无人机端所处高度,所述xi为第i帧车辆与车道线的成像间距,所述ai为第i帧车辆中心点距离的成像点距离镜头的间距,θi为第i帧车辆标记点摄入镜头与所述无人机端垂直方向的夹角。
15、第二方面,本发明还提供一种应用上述任一可选车载无人机救援系统的救护车。
16、可选地,所述救护车上配置有第一命令,所述第一命令用于启动所述救护车的车载无人机救援系统。
17、可选地,所述救护车上配置有显示模块,所述显示模块用于显示所述第一图像信息和所述超车指令中的超车路线。
技术特征:
1.一种基于救护车的车载无人机救援系统,其特征在于,包括无人机端,所述无人机端用于与车辆端通信连接;
2.根据权利要求1所述的一种基于救护车的车载无人机救援系统,其特征在于,所述超车策略配置有第一超车安全值、第二超车安全值、第二算法和第三算法;
3.根据权利要求2所述的一种基于救护车的车载无人机救援系统,其特征在于,所述超车策略配置有预设权重值,所述预设权重值用于与所述稳定权重值进行比较;
4.根据权利要求2所述的一种基于救护车的车载无人机救援系统,其特征在于,所述车辆道路规划模块中还配置有判断单元,所述判断单元用于在具有多条超车路线的前提下,选取所述第一超车间距与所述第一超车安全值的差值,和所述第二超车间距与所述第二超车安全值差值最大的一条超车路线以发出超车指令。
5.根据权利要求1所述的一种基于救护车的车载无人机救援系统,其特征在于,所述无人机端还配置有跟随模块,所述跟随模块用于所述无人机端跟随所述车辆端。
6.根据权利要求5所述的一种基于救护车的车载无人机救援系统,其特征在于,所述跟随模块获取所述车辆端的实时时速,并获取所述车辆端的行驶路线信息以跟随所述车辆端;所述行驶路线信息包括所述超车指令中的超车路线。
7.根据权利要求1所述的一种基于救护车的车载无人机救援系统,其特征在于,所述第一算法为:
8.一种应用如权利要求1至7任一项所述基于救护车的车载无人机救援系统的救护车。
9.根据权利要求8所述的一种基于救护车的车载无人机救援系统的救护车,其特征在于,所述救护车上配置有第一命令,所述第一命令用于启动所述救护车的车载无人机救援系统。
10.根据权利要求8所述的一种基于救护车的车载无人机救援系统的救护车,其特征在于,所述救护车上配置有显示模块,所述显示模块用于显示所述第一图像信息和所述超车指令中的超车路线。
技术总结
本发明提供了一种基于救护车的车载无人机救援系统及救护车,涉及道路车辆的交通控制系统的技术领域。车载无人机救援系统包括与车辆端通信连接的无人机端,且无人机端内配置有拍摄模块和车道规划模块,车道规划模块接收拍摄模块拍摄的第一图像并对第一图像进行处理,以生成含有超车路线的超车指令,并将超车指令发送至车辆端。本发明提供的系统能够对车辆端周边各个车道上的车辆进行实时监控,并依据实时路边规划超车路线并指导通行,以利于救护车安全地超车通过,缩短行驶时间,特别是在高架、快速路、高速等没有行人或行人较少的道路上,能够明显提高车辆的通行效率、行驶速度和行驶安全性。
技术研发人员:刘昱辰,黄璇,李勇
受保护的技术使用者:南昌大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!