一种智能车路协同环形交叉口内车辆换道通行引导方法
本发明涉及智能交通系统中车路协同与安全控制,尤其涉及一种智能车路协同环形交叉口内车辆换道通行引导方法。
背景技术:
1、环形交叉口作为一种特殊的交叉口节点形式,具有高效率、低事故率等优势,可满足城市地标性建筑的需求。汽车保有量与交通量的不断增加,促使城市环形交叉口的交通运行状况也在逐渐恶化。为缓解城市交通拥堵问题,采取了直接拆除或改建环形交叉口的措施,或在环形交叉口入口处设置信号灯,以保证环岛内部车流的正常运转,意在短时间内解决交通拥堵。但加载信号后的环形交叉口不能有效引导交叉口内车辆换道行为,在高峰时段需配合交警指挥来缓解拥堵,并未使城市交通系统的拥堵带来根本性改善。随着计算机技术及智能交通的快速发展,智能车路协同系统将成为解决环形交叉口交通问题的有效手段,以车-车、车-路通信,对车辆换道通行进行高效引导,改善城市交通拥堵,提升行车安全性。
技术实现思路
1、本发明要解决的技术问题是针对上述现有技术的不足,提供一种智能车路协同环形交叉口内车辆换道通行引导方法,基于现有的车路协同环境下环形交叉口车辆通行引导系统,在环形交叉口车辆换道引导通行,提高车辆通行效率,缓解城市交通拥堵问题。
2、为解决上述技术问题,本发明所采取的技术方案是:一种智能车路协同环形交叉口内车辆换道通行引导方法,包括以下步骤:
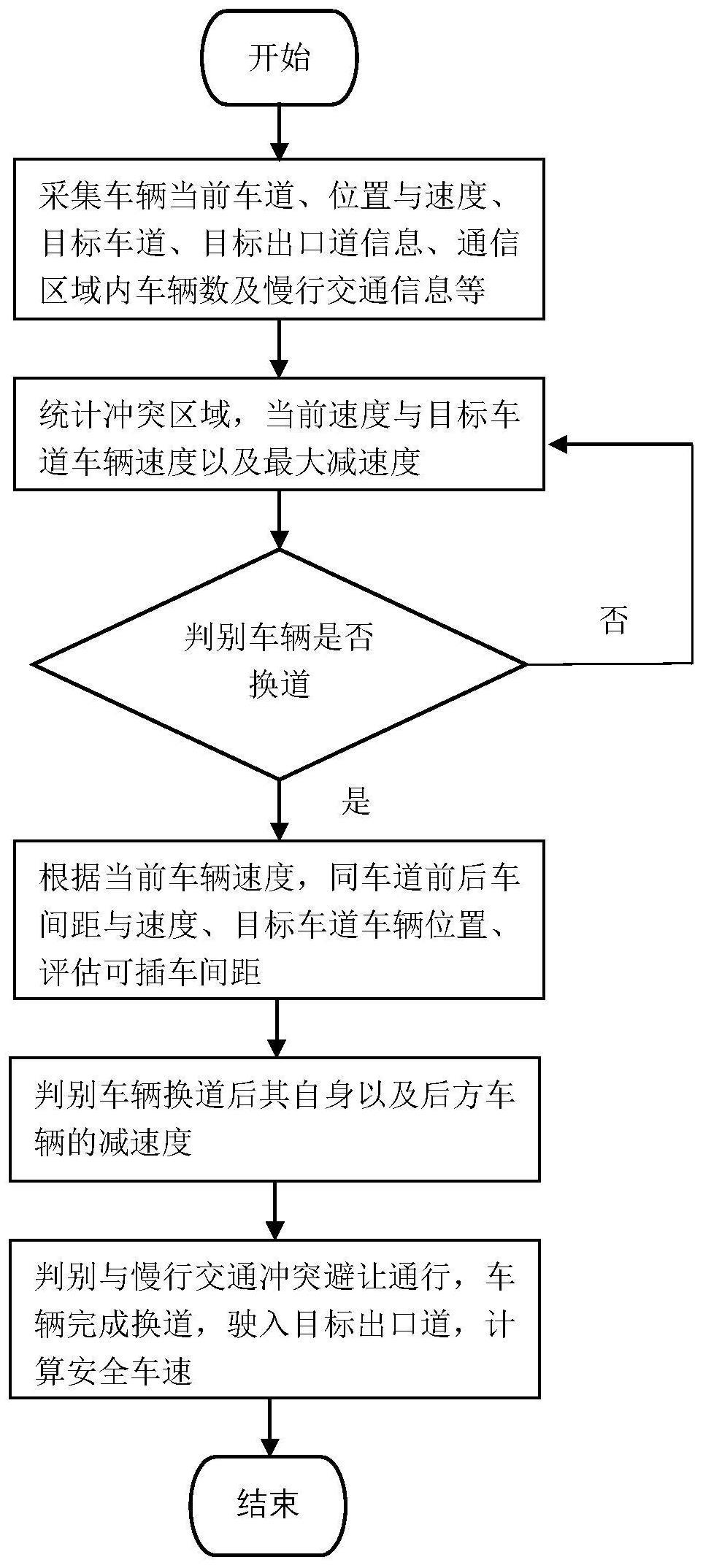
3、步骤1、采集车辆当前车道、位置和速度、目标车道、目标出口道信息、通信区域内车辆数及慢行交通信息等;
4、车载单元实时采集自身车辆车道信息、位置和速度信息,路侧单元实时检测交叉口通信区域内目标车道、目标出口道信息、各车道车辆数量与慢行交通信息,采集车辆转向灯信号,传递车辆行驶方向信息;
5、步骤2、统计机动车冲突区域,当前速度与目标车道车辆速度以及最大减速度;
6、当进入交叉口通信区域时,车载单元与路侧单元、车载单元与车载单元之间进行信息的交互,分析环岛内机动车与机动车冲突区域,根据车载单元与路侧单元、车载单元与车载单元之间交互的信息,统计当前车速度与目标车道车辆速度,计算最大安全速度与最大减速度;
7、步骤2.1、根据环内车辆运行规则,车载单元与路侧单元、车载单元与车载单元之间交互的信息,当车辆需要进行换道时,判断有无冲突车辆,是否存在机动车可穿越空挡,计算最大安全速度;
8、考虑换道车辆n本身于t时刻换道后将以车辆n+1为前导车进行跟驰,为了保证不与车辆n+1发生碰撞,t+t时刻车辆n速度不能超过最大安全速度vn(t+t)。根据前后车位置信息,保持安全距离,前后两辆车之间的相对距离情况下,可推算出车辆跟随最大安全速度,具体车辆跟随最大安全速度计算方法为:
9、
10、根据上述表达式,推算出车辆跟随最大安全速度vn(t+τn)为
11、
12、式中:sn(t+t)为车辆n在t+t时刻的位置;vn(t+t)为车辆n在t+t时刻的速度;τn为后车n反应延时;bn(t)为车辆n在t时刻的减速度;ln为车辆n车身长度。
13、步骤2.2、根据计算最大安全速度,计算得到车辆的最大减速度;
14、计算得到车辆n的最大安全速度vn(t+t),则其减速度最大为[vn(t+t)-vn(t)]/t。如果该减速度绝对值小于车辆n的最大减速度bn的绝对值,则车辆n换道安全;反之则不安全。而对车辆n-1,车辆n换道后成为其前导车,车辆n-1的跟驰规则与车辆n相似,安全条件的与车辆n相似。
15、综合考虑换道后车辆n和车辆n-1的跟驰情况,当[vn(t+t)-vn(t)]/t≥bn且[vn-1(t+t)-vn-1(t)]/t≥bn-1时,车辆换道安全,否则不安全。
16、步骤3、统计慢行交通冲突区域,当前速度与目标车道车辆速度以及最大减速度;
17、当进入交叉口通信区域时,车载单元与路侧单元、车载单元与车载单元之间进行信息的交互,分析环岛内机动车与非机动车冲突区域以及机动车与行人冲突区域;根据车载单元与路侧单元、车载单元与车载单元之间交互的信息,统计当前车速度与目标车道车辆速度,计算最大安全速度与最大减速度;
18、步骤3.1、根据机动车与非机动车冲突区域分析,确定机动车通过非机动车冲突区域的车辆速度以及最大减速度;
19、按照非机动车让行机动车的通行权,机动车以减速度bif减速到vf进入目标车道,其中,bif为机动车在非机动车冲突区域f的减速度,计算如下:
20、
21、其中,si,i-1(t)为前后机动车在t时刻的安全间距;δt为损失时间之和;li-1为第i-1辆机动车的车身长度;vi(t)为第i辆机动车进入环形交叉口目标车道的速度;
22、步骤3.2、根据机动车与行人冲突区域分析,确定机动车通过行人冲突区域的车辆速度以及最大减速度;
23、按照机动车礼让行人的通行权,机动车以减速度bip减速至停车等待行人通行后,驶入目标车道,其中,bip为机动车在行人冲突区域p的减速度,计算如下:
24、
25、其中,s为安全间距;vi-1(t)为第i-1辆机动车进入环形交叉口目标车道的速度。
26、步骤4、计算车辆进入目标出口道的安全速度;
27、计算机动车与机动车车流冲突、机动车与非机动车通行冲突及机动车与行人通行冲突情况下机动车换道驶入目标出口道的安全速度。
28、采用上述技术方案所产生的有益效果在于:本发明提供的一种智能车路协同环形交叉口内车辆换道通行引导方法,充分利用了智能车路协同环境下的信息交互,可以有效缓解环形交叉口车辆换道引发的交通安全问题,提升环形交叉口内车辆通行效率与舒适性。
技术特征:
1.一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:包括以下步骤:
2.根据权利要求1所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤1的具体方法为:
3.根据权利要求1所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤2的具体方法为:
4.根据权利要求3所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤2.1的具体方法为:
5.根据权利要求3所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤2.2的具体方法为:
6.根据权利要求1所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤3的具体方法为:
7.根据权利要求6所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤3.1的具体方法为:
8.根据权利要求6所述的一种智能车路协同环形交叉口内车辆换道通行引导方法,其特征在于:所述步骤3.2的具体方法为:
技术总结
本发明提供一种智能车路协同环形交叉口内车辆换道通行引导方法,涉及智能交通系统中车路协同与安全控制技术领域。该方法首先采集车辆当前车道、位置和速度、目标车道、目标出口道信息,实时检测环形交叉口通信区域内各车道车辆数量与慢行交通信息,统计机动车冲突区域与当前速度;并根据车载单元与路侧单元、车载单元与车载单元之间交互的信息,计算车辆速度以及最大减速度;确定机动车通过慢行交通冲突区域的车辆速度以及最大减速度;最后计算车辆进入目标出口道的安全速度。该方法可以有效缓解环形交叉口车辆换道引发的交通安全问题,提升环形交叉口内车辆通行效率与舒适性。
技术研发人员:张媛媛
受保护的技术使用者:辽宁工程技术大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!