一种交叉口和智能网联车辆控制方法、系统及存储介质
本发明涉及智能交通。具体而言,涉及一种交叉口和智能网联车辆控制方法、系统及存储介质。
背景技术:
1、随着车联网(vehicle to everything,v2x)与智能网联驾驶汽车(connected andautomated vehicle,cav)技术的快速发展,为信号交叉口提供了更多地车辆实时信息和更好地优化车辆轨迹方法。并且在未来,人类驾驶车辆(human-driven vehicle,hv)和cav共存的异质交通流将会普遍存在。
2、现有技术中,针对hv和cav共存的场景,通过基于cav专用车道的异质交通流协同控制方法,在避免hv驾驶行为不确定性的前提下提高交叉口通行能力。然而,现有技术,并没有更好发挥cav网联优势及挖掘交叉口的时空资源,因此,本发明亟需一种能够充分利用交叉口内部的时空资源的异质交通流信号控制方法和车辆控制方法。
技术实现思路
1、本发明正是基于现有技术的上述需求而提出的,本发明要解决的技术问题是提供一种交叉口和智能网联车辆控制方法、系统及存储介质以充分利用交叉口内部的时空资源,提高通信能力,减少车辆延误。
2、为了解决上述问题,本发明是采用如下技术方案实现的:
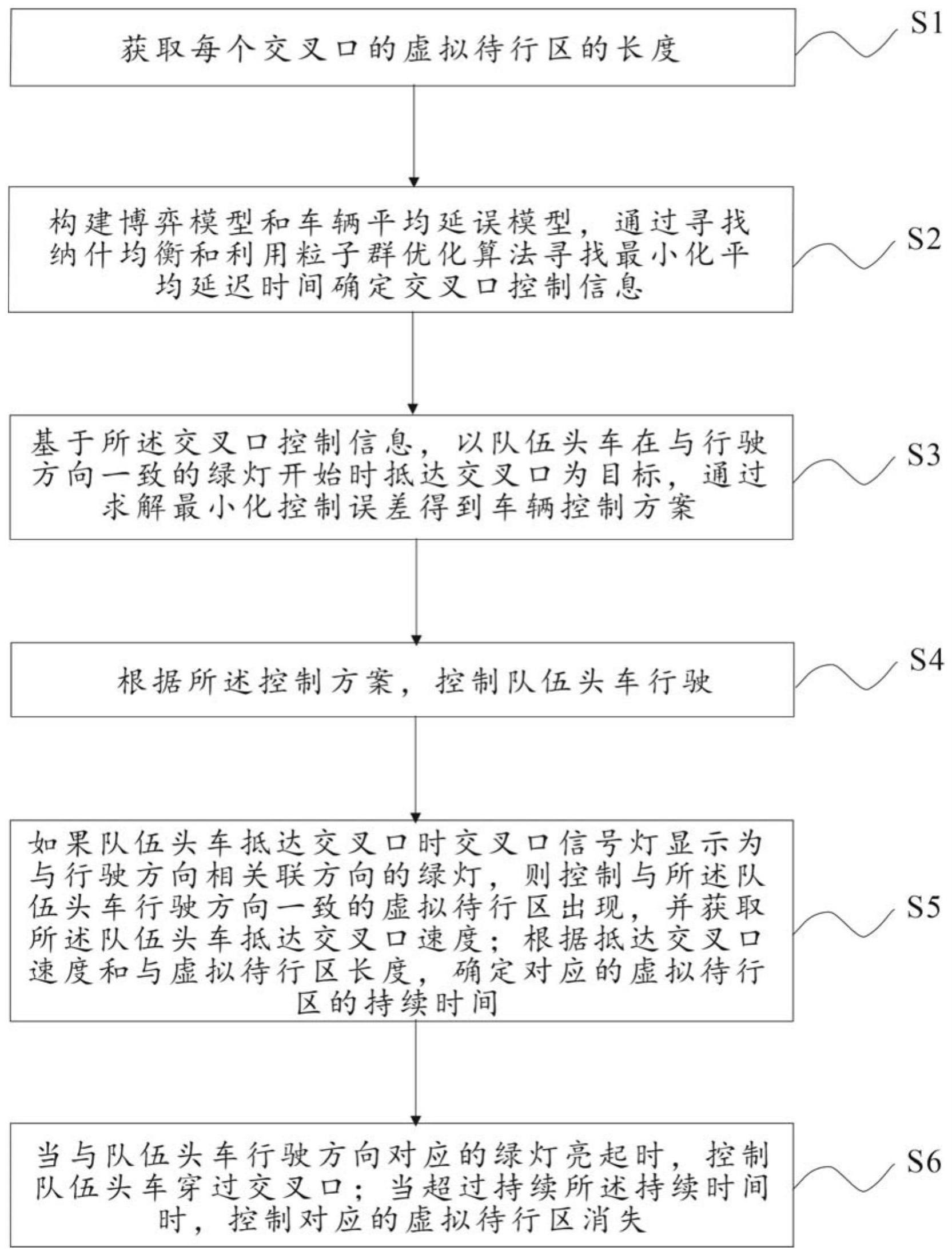
3、提供了一种交叉口和智能网联车辆控制方法,该方法包括:获取每个交叉口的虚拟待行区的长度,所述虚拟待行区包括直行虚拟待行区和左转虚拟待行区,其中,交叉口的直行方向与左转方向相关联;构建博弈模型和车辆平均延误模型,通过寻找纳什均衡和利用粒子群优化算法寻找最小化平均延迟时间确定交叉口控制信息,所述控制信息包括每个周期的相位顺序和相位持续时间;基于所述交叉口控制信息,以队伍头车在与行驶方向一致的绿灯开始时抵达交叉口为目标,通过二次规划求解最小化控制误差得到车辆控制方案;根据所述控制方案控制队伍头车行驶;所述控制误差为预期状态量与实际状态量之间的误差;所述状态量包括速度、位移和加速度;如果队伍头车抵达交叉口时交叉口信号灯显示为与行驶方向相关联方向的绿灯,则控制与所述队伍头车行驶方向一致的虚拟待行区出现,并获取所述队伍头车抵达交叉口速度;根据抵达交叉口速度和与虚拟待行区长度,确定对应的虚拟待行区的持续时间;当与队伍头车行驶方向对应的绿灯亮起时,控制队伍头车穿过交叉口;当超过持续所述持续时间时,控制对应的虚拟待行区消失。
4、可选地,所述获取每个交叉口的虚拟待行区的长度,包括:由交叉口入口的停车线到左转交叉口出口的左转行车线的距离,确定直行虚拟待行区的长度;由交叉口入口的停车线到左转交叉口出口的直行行车线的距离,确定左转虚拟待行区的长度。
5、可选地,所述基于博弈论构建以最小化车辆平均延误为目标的相邻交叉口模型,通过纳什平衡确定交叉口控制信息,包括:步骤一:构建博弈模型m={t,i,a,u},t表示交叉口的集合,i表示获取的每个交叉口的信息,a表示每个交叉口执行的动作,u表示效用函数;步骤二:构建车辆平均延迟时间算法,所述平均延迟时间算法表示为:其中,tdelay表示所有交叉口的延迟时间;n表示所有交叉口的其中一个;k表示交叉口n的一个进口道;rn表示交叉口n的所有入口;qk表示交叉口入口k的道路交通流量,w表示自变量,λ表示绿信比,dk(w,λ)表示延迟函数,dw表达式为:其中,dk表示车辆延迟时间;表示信号周期;λk表示进口道k的绿信比;w表示交通车流量;ηk表示饱和度;sk表示饱和交通量;步骤三:通过粒子群优化算法寻找最小化平均延迟时间的绿信比策略;步骤四:在当前绿信比策略下,利用博弈模型分析得到第一结果,所述第一结果包括最佳策略选择和达到纳什均衡的策略;步骤五:根据所述第一结果,确定粒子群优化算法下一次的搜索方向;步骤六:根据所述搜索方向,更新绿信比策略;重复执行步骤四至步骤六一次以上,以使绿信比策略达到稳定状态,并获取对应的最佳策略选择,作为交叉口控制信息。
6、可选地,所述粒子群优化算法表达式为:其中,ω为惯性权重,z为当前迭代次数;为迭代次数z的粒子速度;为迭代次数z+1的粒子速度;为迭代次数z的粒子位置;为迭代次数z+1的粒子位置;为个体极值;为群体极值;c1,r1,c2,r2为超参数,ωmax,ωmin分别为惯性权重最大值与最小值,nmax为最大迭代次数。
7、可选地,所述最小化控制误差表达式为:minldiff,ldiff=(xk-dk)tq(xk-dk),xk=ψx(k)+θuk,其中,ldiff表示控制误差;xk表示时刻k的未来p个控制周期内的实际状态量;ψ表示3p*3的列向量,其表达式为θ表示3p*p的下三角矩阵,其表达式为其中,t′=0.1s;x(k)表示时刻k的实际状态量,uk表示时刻k的未来p个控制周期内的期望状态量,dk表示p个控制周期内的状态变量的期望值序列;q表示若尔当矩阵,其表达式为其中p1,p2,p3表示权重。
8、可选地,所述根据抵达交叉口速度和与虚拟待行区长度,确定对应的虚拟待行区的持续时间,包括:以抵达交叉口的速度作为队伍头车从虚拟待行区的起始处行驶至终点处的平均速度;根据所述平均速度和虚拟待行区长度,确定对应的虚拟待行区的持续时间。
9、可选地,还包括:交叉口的每个路口包括调整区和专用车道区,在调整区内,按照行驶方向调整车辆形成队列;在专用车道区内,队列中的队伍成员根据队伍车头的轨迹行驶。
10、提供了一种交叉口和智能网联车辆控制系统,该系统包括:获取模块,获取每个交叉口的虚拟待行区的长度,所述虚拟待行区包括直行虚拟待行区和左转虚拟待行区,其中,交叉口的直行方向与左转方向相关联;第一处理模块,构建博弈模型和车辆平均延误模型,通过寻找纳什均衡和利用粒子群优化算法寻找最小化平均延迟时间确定交叉口控制信息,所述控制信息包括每个周期的相位顺序和相位持续时间;第二处理模块,基于所述交叉口控制信息,以队伍头车在与行驶方向一致的绿灯开始时抵达交叉口为目标,通过二次规划求解最小化控制误差得到车辆控制方案;控制模块,根据所述控制方案控制队伍头车行驶;所述控制误差为预期状态量与实际状态量之间的误差;所述状态量包括速度、位移和加速度;如果队伍头车抵达交叉口时交叉口信号灯显示为与行驶方向相关联方向的绿灯,则控制与所述队伍头车行驶方向一致的虚拟待行区出现,并获取所述队伍头车抵达交叉口速度;根据抵达交叉口速度和与虚拟待行区长度,确定对应的虚拟待行区的持续时间;当与队伍头车行驶方向对应的绿灯亮起时,控制队伍头车穿过交叉口;当超过持续所述持续时间时,控制对应的虚拟待行区消失。
11、一种计算机可读存储介质,其上存储有计算机程序,所述计算机可读存储介质上存储有交叉口和智能网联车辆控制程序,所述交叉口和智能网联车辆控制程序在被处理器执行时,实现所述一种交叉口和智能网联车辆控制方法。
12、与现有技术相比,本发明充分通过设置虚拟待行区,充分挖掘了交叉口的时空资源,能够在有效提高交叉口通行能力的基础上降低平均车辆延误。
技术特征:
1.一种交叉口和智能网联车辆控制方法,其特征在于,包括:
2.根据权利要求1所述的一种交叉口和智能网联车辆控制方法,其特征在于,所述获取每个交叉口的虚拟待行区的长度,包括:
3.根据权利要求1所述的一种交叉口和智能网联车辆控制方法,其特征在于,所述基于博弈论构建以最小化车辆平均延误为目标的相邻交叉口模型,通过纳什平衡确定交叉口控制信息,包括:
4.根据权利要求3所述的一种交叉口和智能网联车辆控制方法,其特征在于,所述粒子群优化算法表达式为:
5.根据权利要求1所述的一种交叉口和智能网联车辆控制方法,其特征在于,所述最小化控制误差表达式为:
6.根据权利要求1所述的一种交叉口和智能网联车辆控制方法,其特征在于,所述根据抵达交叉口速度和与虚拟待行区长度,确定对应的虚拟待行区的持续时间,包括:
7.根据权利要求1所述的一种交叉口和智能网联车辆控制方法,其特征在于,还包括:交叉口的每个路口包括调整区和专用车道区,在调整区内,按照行驶方向调整车辆形成队列;在专用车道区内,队列中的队伍成员根据队伍车头的轨迹行驶。
8.一种交叉口和智能网联车辆控制系统,其特征在于,包括:
9.一种计算机可读存储介质,其上存储有计算机程序,所述计算机可读存储介质上存储有交叉口和智能网联车辆控制程序,所述交叉口和智能网联车辆控制程序在被处理器执行时,实现权利要求1-7中任一项所述一种交叉口和智能网联车辆控制方法。
技术总结
本发明公开了一种交叉口和智能网联车辆控制方法、系统及存储介质,包括:获取每个交叉口的虚拟待行区的长度;构建博弈模型和车辆平均延误模型,通过寻找纳什均衡和利用粒子群优化算法寻找最小化平均延迟时间确定交叉口控制信息;确定车辆控制方案;根据控制方案控制队伍头车行驶;如果交叉口为与行驶方向相关联方向的绿灯,则控制与行驶方向一致的虚拟待行区出现,并获取抵达交叉口速度;根据速度和与虚拟待行区长度,确定对应的虚拟待行区的持续时间;当与行驶方向相同的绿灯亮起时,控制队伍头车穿过交叉口;当超过持续持续时间时,控制虚拟待行区消失。本发明充分挖掘了交叉口的时空资源,提高了交叉口通行能力,降低了平均车辆延误。
技术研发人员:于海洋,王吉祥,任毅龙,陈思祺,董承霖
受保护的技术使用者:北京航空航天大学
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!