一种基于机器视觉的智能交通灯控制系统
本发明涉及交通控制,特别涉及一种基于机器视觉的智能交通灯控制系统。
背景技术:
1、我国大部分城市及地区的交通灯控制系统通常是定时和静态的,红绿灯的切换按照预先设定的周期进行,无法根据实际交通状况进行实时的控制,增加了无效等待时间,从而降低了道路的使用效率。随着城市人口与车辆数量的快速增加,道路交通拥堵问题日益突出,因此需要一种可根据实时车流量调整红绿灯时长的交通灯控制系统,改善交通管理质量,减少车辆停车等待时间,缓解城市交通拥堵问题。基于机器视觉对交通灯进行调节是一种可用的方法,其原理是:高清摄像头拍摄图像,根据所拍摄的图像获得路况,根据获得的路况对道路交通进行实时控制。
2、现有技术中,授权公告号cn 113470385 b,授权公告日:2022.03.15,名称为基于机器视觉的交通灯控制方法、系统、装置及存储介质,该发明包括:获取交通路口各个车道的第一图像信息,车道包括车辆正在行驶的行驶车道和车辆正在等候的等候车道;根据第一图像信息确定行驶车道的车流量信息和等候车道的等候车辆数量信息;根据车流量信息确定对应交通相位的总车流量,并根据等候车辆数量信息确定对应交通相位的总等候车辆数量;根据总车流量和总等候车辆数量确定下一红绿灯周期的红绿灯配时方案,进而根据红绿灯配时方案对各车道的交通灯进行控制。
3、但是,上述发明中,在获取车流量信息时,使用深度神经网络进行车辆识别,而使用深度神经网络进行识别需要较大的计算量,需要更多的时间来完成计算任务,对于较弱的计算设备和资源受限的环境,使用卷积神经网络进行交通灯调节可能导致处理速度的下降,无法实时应用和处理需要即时反馈的场景。
技术实现思路
1、本发明提供一种基于机器视觉的智能交通灯控制系统,可以解决现有技术中,使用机器视觉获取道路车流量信息时计算量大的问题。
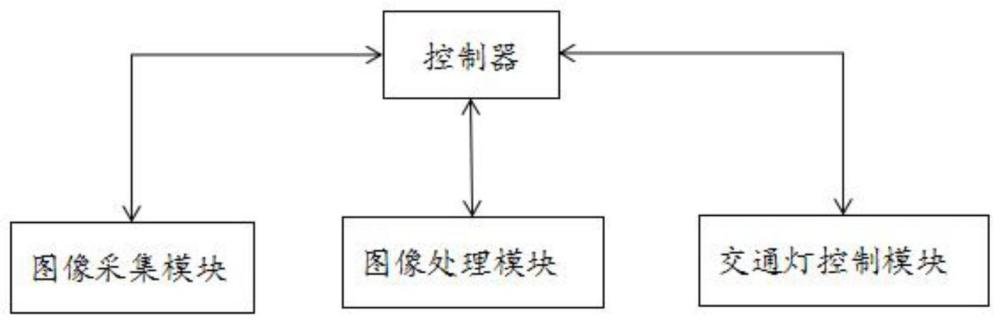
2、本发明提供一种基于机器视觉的智能交通灯控制系统,包括:
3、图像采集模块,用于获取交通灯附近的路况图像;
4、图像处理模块,
5、用于根据各交通灯附近的公路交通标线制作与各交通灯对应的左转车道掩膜、直行车道掩膜、右转车道掩膜;
6、用于将所采集的各交通灯的彩色路况图像转变为灰度路况图像,将所述灰度路况图像与对应的左转、直行、右转车道掩膜分别相乘,获得左转车道路况图像、直行车道路况图像、右转车道路况图像;
7、用于分别计算左转车道路况图像、直行车道路况图像、右转车道路况图像的中线上所有相邻像素点的灰度变化率,设置阈值,将灰度变化率大于所设阈值的像素点标记为有效像素点;
8、用于将有效像素点个数与对应的中线总像素点个数的比值作为对应车道的拥堵程度:
9、交通灯控制模块,用于根据所述拥堵程度控制交通灯的切换。
10、进一步的,所述图像采集模块,用于:
11、在每个交通灯旁固定设置一个高清摄像头,并对其进行编号,由所述高清摄像头拍摄采集各交通灯附近的路况图像;
12、其中所述交通灯、所述高清摄像头、所述路况图像之间一一对应。
13、进一步的,所述根据各交通灯附近的公路交通标线制作与各交通灯对应的左转车道掩膜、直行车道掩膜、右转车道掩膜,包括:
14、
15、其中,
16、n是高清摄像头个数;
17、是人工根据第i个高清摄像头拍摄路况图像上的公路交通标线制作的左转车道图像掩膜;
18、是人工根据第i个高清摄像头拍摄路况图像上的公路交通标线制作的直行车道图像掩膜;
19、是人工根据第i个高清摄像头拍摄路况图像上的公路交通标线制作的右转车道图像掩膜;
20、所述左转车道图像掩膜、直行车道图像掩膜、右转车道图像掩膜中对应车道区域的像素被保留,其他区域的像素被遮挡。
21、进一步的,所述将所述灰度路况图像与对应的左转、直行、右转车道掩膜分别相乘,获得左转车道路况图像、直行车道路况图像、右转车道路况图像,包括:
22、
23、
24、其中,
25、gi是由第i个高清摄像头拍摄的彩色图像生成的灰度图;
26、分别是与第i个高清摄像头对应的左转车道图像掩膜、直行车道图像掩膜、右转车道图像掩膜;
27、分别是与第i个高清摄像头对应的左转车道路况图像、直行车道路况图像、右转车道路况图像。
28、进一步的,所述分别计算左转车道路况图像、直行车道路况图像、右转车道路况图像的中线上所有相邻像素点的灰度变化率,包括:
29、
30、
31、其中,
32、分别是与第i个高清摄像头对应的左转道路况图像中线直行车道路况图像中线右转车道路况图像中线的相邻像素点的灰度变化率集合;
33、分别是中线上第j个像素点;
34、分别是像素点的灰度值;
35、分别是中线上第j个像素点与第j-1个像素点的灰度变换率。
36、进一步的,所述将有效像素点个数与对应的中线总像素点个数的比值作为对应车道的拥堵程度,包括:
37、
38、
39、其中,
40、分别是中线上的有效像素点个数;
41、mil、mis、mir分别是中线上所有像素点个数;
42、分别是与第i个高清摄像头对应的交通灯的左转车道拥挤程度、直行转车道拥挤程度、右转车道拥挤程度。
43、进一步的,所述交通灯控制模块,包括:
44、当流入车道的拥挤程度大于等于0.5、当前车道的拥挤程度大于等于0.5,当前车道的交通灯为红灯时,缩短红灯时间;当前车道的交通灯为绿灯时,延长绿灯时间时间;
45、当流入车道的拥挤程度大于等于0.5、当前车道的拥挤程度小于0.5,当前车道的交通灯为红灯时,缩短红灯时间;当前车道的交通灯为绿灯时,不变或延长绿灯时间时间;
46、当流入车道的拥挤程度小于0.5、当前车道的拥挤程度大于等于0.5,当前车道的交通灯为红灯时,缩短红灯时间;当前车道的交通灯为绿灯时,不变或延长绿灯时间时间;
47、当流入车道的拥挤程度小于0.5、当前车道的拥挤程度小于0.5,当前车道的交通灯为红灯时,延长红灯时间;当前车道的交通灯为绿灯时,缩短绿灯时间时间。
48、本发明实施例提供一种基于机器视觉的智能交通灯控制系统,与现有技术相比,其有益效果如下:
49、本发明首先将获得的r、g、b彩色路况图像转变为灰度路况图像,降低了2/3的计算量,然后通过掩膜剔除非车道区域获得车道区域,并且仅考虑车道区域中线位置的像素灰度变化,需要处理的信息量更小,进一步减少了计算量,提高了交通灯调节的即时处理速度和效率。
技术特征:
1.一种基于机器视觉的智能交通灯控制系统,其特征在于,包括:
2.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述图像采集模块,用于:
3.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述根据各交通灯附近的公路交通标线制作与各交通灯对应的左转车道掩膜、直行车道掩膜、右转车道掩膜,包括:
4.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述将所述灰度路况图像与对应的左转、直行、右转车道掩膜分别相乘,获得左转车道路况图像、直行车道路况图像、右转车道路况图像,包括:
5.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述分别计算左转车道路况图像、直行车道路况图像、右转车道路况图像的中线上所有相邻像素点的灰度变化率,包括:
6.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述将有效像素点个数与对应的中线总像素点个数的比值作为对应车道的拥堵程度,包括:
7.根据权利要求1所述的基于机器视觉的智能交通灯控制系统,其特征在于,所述交通灯控制模块,包括:
技术总结
本发明公开一种基于机器视觉的智能交通灯控制系统,涉及交通控制技术领域,包括图像采集模块,用于获取交通灯附近的路况图像;图像处理模块,用于对所获取的路况图像进行处理分析,得到对应交通灯的路况拥挤程度;交通灯控制模块,用于根据所述拥堵程度控制交通灯的切换;所述图像采集模块、图像处理模块、交通灯控制模块均与处理器连接。本发明首先将获得的R、G、B彩色路况图像转变为灰度路况图像,降低了2/3的计算量,然后通过掩膜剔除非车道区域获得车道区域,并且仅考虑车道区域中线位置的像素灰度变化,需要处理的信息量更小,进一步减少了计算量,提高了交通灯调节的即时处理速度和效率。
技术研发人员:陈亮亮,詹春,张辰昕,黄瑶磊,刘志杰,武汝东,柳琳,陈富康
受保护的技术使用者:江西科技师范大学
技术研发日:
技术公布日:2024/1/25
- 还没有人留言评论。精彩留言会获得点赞!