一种隧道施工错车感知调度系统的制作方法
本技术涉及一种隧道施工错车感知调度系统。
背景技术:
1、隧道施工中,错车是一种常见的现象。尤其在长距离隧道施工中,隧道内空间狭小,往往两辆大车无法并行行驶,而且隧道内视线受限,光线较暗,容易在错车时不注意发生碰撞,或与隧道侧壁及皮带机等设备发生刮蹭,导致事故发生。
2、为了避免这种情况,需要对隧道内的车辆进行有效的监控和调度。现有的监控和调度系统主要依靠人工进行,效率较低,容易出现失误。因此,开发一种错车感知调度系统具有重要的实际意义。
技术实现思路
1、本实用新型的目的在于,针对上述存在的问题,提供一种隧道施工错车感知调度系统。
2、为此,本实用新型的上述目的通过如下技术方案实现:
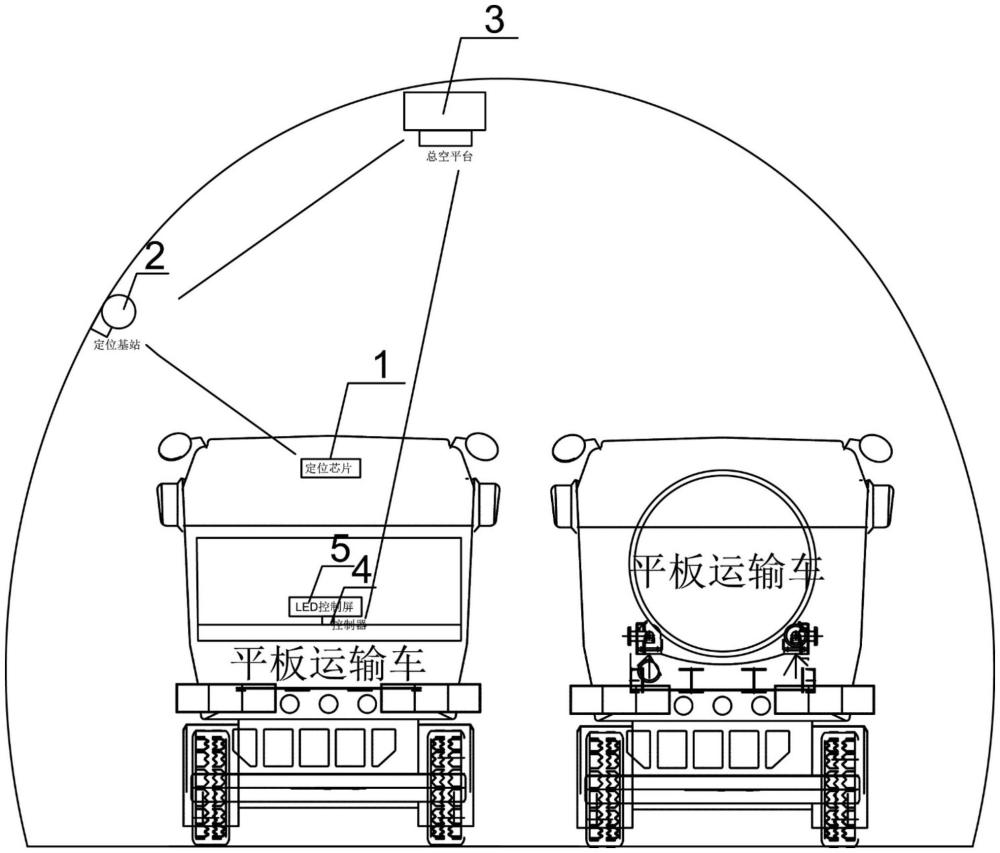
3、一种隧道施工错车感知调度系统,其特征在于:所述隧道施工错车感知调度系统包括定位芯片、定位基站、总控平台、控制器和车载led,
4、所述定位芯片、控制器和车载led设置在隧道施工车辆上;所述定位芯片用于获取隧道施工车辆的位置和速度信息,并将位置和速度信息发送至定位基站;
5、所述定位基站间隔设置在施工隧道的侧壁上,所述定位基站用于将隧道施工车辆的位置和速度信息发送至总控平台;
6、所述总控平台用于接收定位基站所发送的隧道施工车辆的位置和速度信息,并对相近两个车辆之间的距离进行判定:当相近两个车辆的距离很近,则向控制器发送提示信息;
7、所述控制器经无线网络接收来自总控平台的提示信息,并将该提示信息投放至车载led上。
8、在采用上述技术方案的同时,本实用新型还可以采用或者组合采用如下技术方案:
9、作为本实用新型的一种优选技术方案:所述定位芯片为rfid定位芯片或者uwb定位芯片。
10、作为本实用新型的一种优选技术方案:所述控制器为arduino微控制器、raspberry pi微控制器或者stm32微控制器。
11、作为本实用新型的一种优选技术方案:所述无线网络为wifi或者4g或者5g。
12、作为本实用新型的一种优选技术方案:所述隧道施工车辆为平板车或者混凝土罐车或者载作业人员进洞客车。
13、作为本实用新型的一种优选技术方案:长直隧道侧壁上每隔60至100米安装一个定位基站,拐弯处的隧道侧壁上每隔40米安装一个定位基站。
14、本实用新型提供一种隧道施工错车感知调度系统,通过定位芯片、车载led屏幕、控制器、定位基站及总控平台组成,能够实现对隧道内车辆的监控和调度,提高施工效率和安全性。
技术特征:
1.一种隧道施工错车感知调度系统,其特征在于:所述隧道施工错车感知调度系统包括定位芯片、定位基站、总控平台、控制器和车载led,
2.根据权利要求1所述的隧道施工错车感知调度系统,其特征在于:所述定位芯片为rfid定位芯片或者uwb定位芯片。
3. 根据权利要求1所述的隧道施工错车感知调度系统,其特征在于:所述控制器为arduino微控制器、raspberry pi微控制器或者stm32微控制器。
4.根据权利要求1所述的隧道施工错车感知调度系统,其特征在于:所述无线网络为wifi或者4g或者5g。
5.根据权利要求1所述的隧道施工错车感知调度系统,其特征在于:所述隧道施工车辆为平板车或者混凝土罐车或者载作业人员进洞客车。
6.根据权利要求1所述的隧道施工错车感知调度系统,其特征在于:长直隧道侧壁上每隔60至100米安装一个定位基站,拐弯处的隧道侧壁上每隔40米安装一个定位基站。
技术总结
本技术提供一种隧道施工错车感知调度系统,包括定位芯片、定位基站、总控平台、控制器和车载LED,所述定位芯片、控制器和车载LED设置在隧道施工车辆上;所述定位芯片用于获取隧道施工车辆的位置和速度信息,并将信息发送至定位基站;所述定位基站间隔设置在施工隧道的侧壁上,所述定位基站用于将隧道施工车辆的位置和速度信息发送至总控平台;所述总控平台用于接收定位基站所发送的信息,并对相近两个车辆之间的距离进行判定:当相近两个车辆的距离很近,则向控制器发送提示信息;所述控制器经无线网络接收来自总控平台的提示信息,并将该提示信息投放至车载LED上。本技术能够实现对隧道内车辆的监控和调度,提高施工效率和安全性。
技术研发人员:孙鹏宇,李西亚,严定成,许金林,吴青瑜,梁志强,虞海琪,苏竞雯,王忠元,陈天虹,翁知原,徐少伟,冯智超,吴坚,邱慧珊,杨文
受保护的技术使用者:中国电建集团华东勘测设计研究院有限公司
技术研发日:20230718
技术公布日:2024/3/17
- 还没有人留言评论。精彩留言会获得点赞!