一种基于基础设施的对象级感知方法、系统及电子设备与流程
本发明涉及对象级感知系统,特别是涉及一种基于基础设施的对象级感知方法、系统及电子设备。
背景技术:
1、随着出行需求的快速增长,交通系统面临着日益严峻的交通相关挑战,例如提高交通安全、缓解交通拥堵和减少移动源排放。利用近年来在先进传感、无线连接和人工智能方面取得的进步,协同驾驶自动化(cda)吸引了越来越多的关注,并被视为应对上述挑战的变革性解决方案。提高互联和自动驾驶汽车(cav)在如此复杂环境中的适应能力的流行方法之一是提高其态势感知能力。例如,车辆配备了越来越多的高分辨率车载传感器,并升级了强大的车载计算机,以更好地感知周围环境并自行做出决策,这与高度自动化汽车(hav)的路径类似。然而,该路线面临几个主要挑战:1)大规模高分辨传感器的成本令人望而却步;2)车载传感器的检测范围有限,由于安装高度和位置的原因,车载传感器也会受到遮挡的影响。
2、近年来,路边传感器辅助感知吸引了cav的大量关注,被认为是一种有前途的方式,可以为协同驾驶自动化应用释放大量机会。目前的道路侧传感系统主要基于摄像头,在交通监控(如转弯运动计数)方面具有成本效益和完善性,但由于照明条件和阴影效应,很难提供可靠的物体级高保真3d信息。考虑到其基于点云数据确定准确3d位置的能力,激光雷达(lidar)在基于基础设施的交通监控中越来越受欢迎。路边激光雷达在车辆检测、车辆跟踪、车道识别、行人近撞警告和其他应用中具有较好的性能。这些研究为基于路边激光雷达的感知系统的应用奠定了基础。然而,这些系统大多部署在传统的感知管道上,包括背景过滤、点云聚类、目标分类和目标跟踪。这种管道可能会产生稳定的结果,但存在不确定性和普遍性。随着计算机视觉的发展,基于深度学习的感知模型在克服上述问题方面显示出巨大的潜力。然而,很少有研究将基于深度学习的感知算法应用于路边lidar系统。
技术实现思路
1、本发明的目的是提供一种基于基础设施的对象级感知方法、系统及电子设备,能够提高基础设施的对象级感知精度。
2、为实现上述目的,本发明提供了如下方案:
3、一种基于基础设施的对象级感知方法,所述方法应用于基于基础设施的对象级感知装置,所述装置包括:云系统、边路系统和移动系统;
4、所述边路系统和所述移动系统均与所述云系统连接;
5、所述边路系统的数量为一个或多个;所述边路系统设置于被测公路的路边;所述边路系统与被测公路中的监测路段一一对应设置;
6、所述移动系统的数量为一个或多个;
7、所述边路系统用于获取所在监测路段的点云数据,并根据所述点云数据确定目标边界;所述点云数据是边路系统中的激光雷达处于多个姿态下获取的;
8、所述云系统用于根据一个或多个边路系统识别到的目标边界完成场景模拟;
9、所述移动系统用于接收并显示场景模拟的结果;
10、所述方法包括:
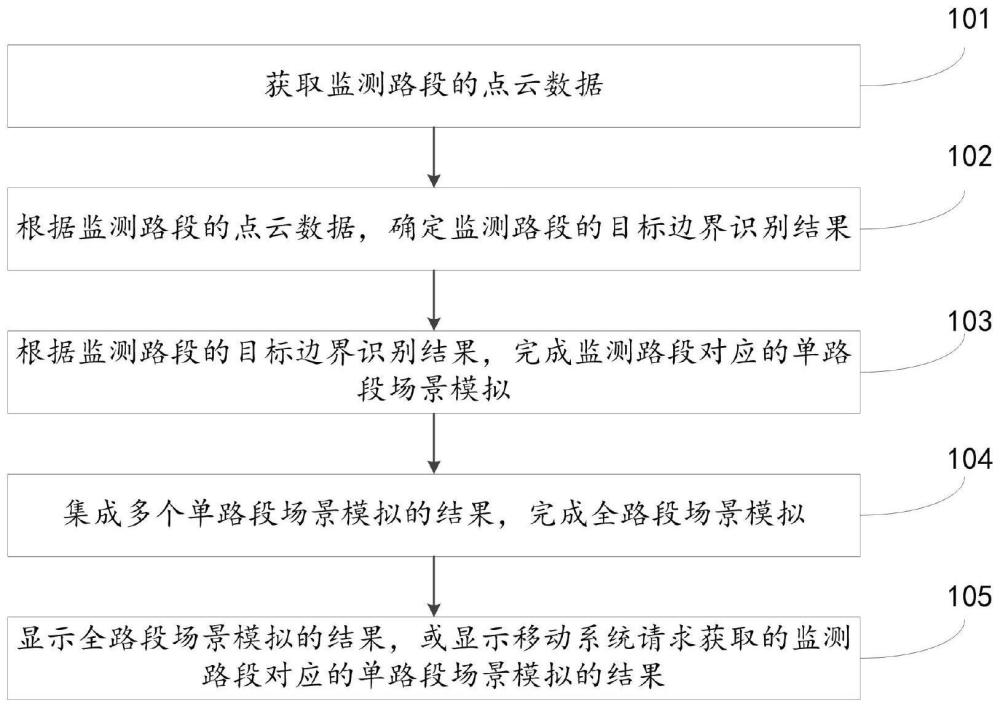
11、获取监测路段的点云数据;
12、根据监测路段的点云数据,确定监测路段的目标边界识别结果;
13、根据监测路段的目标边界识别结果,完成监测路段对应的单路段场景模拟;
14、集成多个单路段场景模拟的结果,完成全路段场景模拟;
15、显示全路段场景模拟的结果,或显示移动系统请求获取的监测路段对应的单路段场景模拟的结果。
16、可选的,所述根据监测路段的点云数据,确定监测路段的目标边界识别结果,包括:
17、利用最小二乘回归法对监测路段的点云数据进行自校准,得到编码点云数据;
18、对所述编码点云数据进行体素化处理,得到多个点云柱;
19、将多个所述点云柱对应的编码点云数据集合,输入到特征提取网络中,得到每个点云柱的边界识别结果;所述特征提取网络是利用监测路段的多个历史点云数据对初始特征提取网络进行训练后得到的。
20、可选的,所述初始特征提取网络包括:依次连接的第一2d卷积层、第二2d卷积层、第三2d卷积层和反卷积层。
21、可选的,在所述获取监测路段的点云数据之前,还包括:
22、获取监测路段的多个历史点云数据;
23、利用最小二乘回归法对多个历史点云数据进行自校准,得到多个历史编码点云数据;
24、分别对每个所述历史编码点云数据进行体素化处理,得到多个历史点云柱;
25、对每个历史点云柱进行边界标注处理,得到历史边界标注结果;
26、以历史点云柱对应的历史编码点云数据集合为输入,以历史边界标注结果为输出,对初始特征提取网络进行训练,得到特征提取网络。
27、一种基于基础设施的对象级感知系统,包括:
28、点云数据获取模块,用于获取监测路段的点云数据;
29、边界识别模块,用于根据监测路段的点云数据,确定监测路段的目标边界识别结果;
30、单路段场景模拟模块,用于根据监测路段的目标边界识别结果,完成监测路段对应的单路段场景模拟;
31、全路段场景模拟模块,用于集成多个单路段场景模拟的结果,完成全路段场景模拟;
32、场景模拟显示模块,用于显示全路段场景模拟的结果,或显示移动系统请求获取的监测路段对应的单路段场景模拟的结果。
33、一种电子设备,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行所述的一种基于基础设施的对象级感知方法。
34、可选的,所述存储器为可读存储介质。
35、根据本发明提供的具体实施例,本发明公开了以下技术效果:
36、本发明提供的一种基于基础设施的对象级感知方法、系统及电子设备,基于cmr模型,有效且较准确的通过路测传感器在路侧观测交通目标,得到较好的高清感知信息,通过仿真平台,避开了在部署cmr系统传感器面临的高成本、耗时等问题,高效且具有成本效益的对路测感知模型进行训练,仿真平台得到的数据对现实测量系统进行了回环反馈,通过与仿真系统仿真结果的对比,在真实物理世界中搭建cmr系统平台,从路测传感器得到了可靠性更高的高清感知信息,以应用于更多高级驾驶辅助系统(adas)。
技术特征:
1.一种基于基础设施的对象级感知方法,其特征在于,所述方法应用于基于基础设施的对象级感知装置,所述装置包括:云系统、边路系统和移动系统;
2.根据权利要求1所述的一种基于基础设施的对象级感知方法,其特征在于,所述根据监测路段的点云数据,确定监测路段的目标边界识别结果,包括:
3.根据权利要求2所述的一种基于基础设施的对象级感知方法,其特征在于,所述初始特征提取网络包括:依次连接的第一2d卷积层、第二2d卷积层、第三2d卷积层和反卷积层。
4.根据权利要求2所述的一种基于基础设施的对象级感知方法,其特征在于,在所述获取监测路段的点云数据之前,还包括:
5.一种基于基础设施的对象级感知系统,其特征在于,包括:
6.一种电子设备,其特征在于,包括存储器及处理器,所述存储器用于存储计算机程序,所述处理器运行所述计算机程序以使所述电子设备执行权利要求1至4中任一项所述的一种基于基础设施的对象级感知方法。
7.根据权利要求6所述的一种电子设备,其特征在于,所述存储器为可读存储介质。
技术总结
本发明的目的是提供一种基于基础设施的对象级感知方法、系统及电子设备,涉及对象级感知系统技术领域。方法包括:根据监测路段的点云数据,确定监测路段的目标边界识别结果,根据监测路段的目标边界识别结果,完成监测路段对应的单路段场景模拟,集成多个单路段场景模拟的结果,完成全路段场景模拟,显示全路段场景模拟的结果,或显示移动系统请求获取的监测路段对应的单路段场景模拟的结果。本发明能够完成基础设施的对象级感知精度进而提高场景模拟精度。
技术研发人员:殷嘉伦,王钊,闫家强,刘晨,张祖锋
受保护的技术使用者:苏州德宜溪谷智能科技有限公司
技术研发日:
技术公布日:2024/5/8
- 还没有人留言评论。精彩留言会获得点赞!