车位状态的检测方法、装置、电子设备及可读存储介质与流程
本申请涉及汽车,尤其涉及一种车位状态的检测方法、装置、电子设备及可读存储介质。
背景技术:
1、当前的车位检测主要有划线车位检测和空间车位检测两种,空间车位检测一般是基于超声波检测数据,其缺点在于检测效率低且对硬件依赖高;划线车位检测主要是通过视觉检测模型,其精度越高,检测的准确率也就越高,但是当车位被障碍物、地锁、行人等占用时,很难准确识别当前车位的可用状态。
2、因此,现在亟待一种可以识别车位当前状态的高精度的车位识别方法。
技术实现思路
1、有鉴于此,本申请实施例提供了一种车位状态的检测方法、装置、电子设备及可读存储介质,以解决现有技术中车位识别精度低的问题。
2、本申请实施例的第一方面,提供了一种车位状态的检测方法,包括:
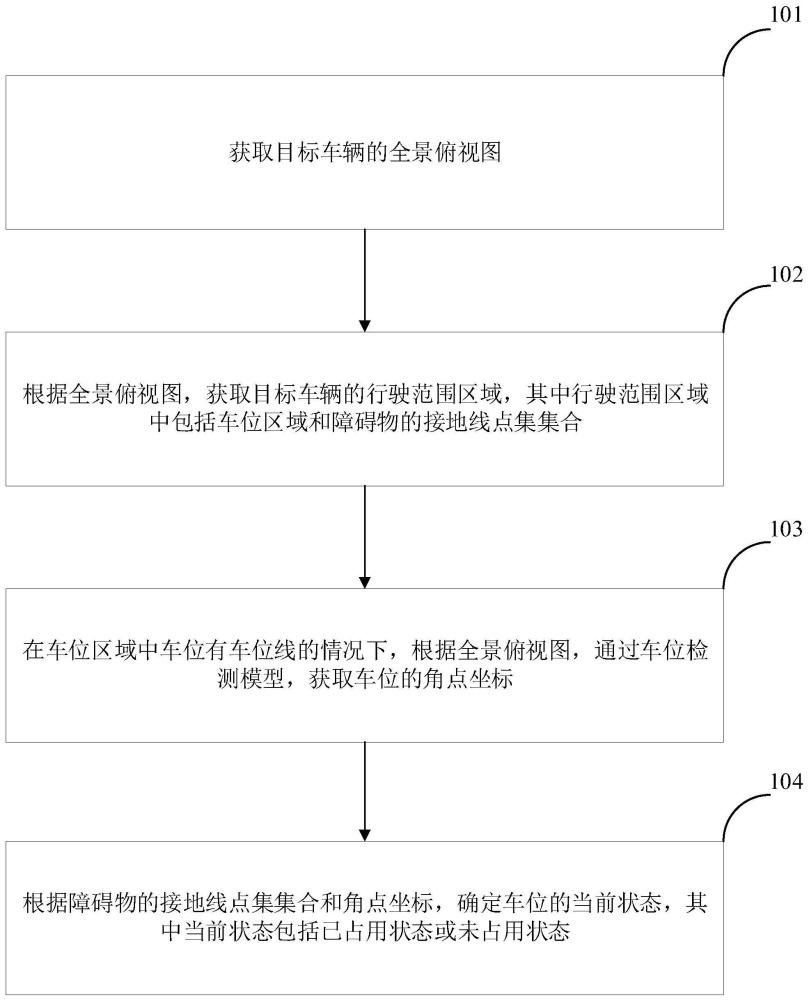
3、获取目标车辆的全景俯视图;
4、根据全景俯视图,获取目标车辆的行驶范围区域,其中行驶范围区域中包括车位区域和障碍物的接地线点集集合;
5、在车位区域中车位有车位线的情况下,根据全景俯视图,通过车位检测模型,获取车位的角点坐标;
6、根据障碍物的接地线点集集合和角点坐标,确定车位的当前状态,其中当前状态包括已占用状态或未占用状态。
7、本申请实施例的第二方面,提供了一种车位状态的检测装置,包括:
8、第一获取模块,用于获取目标车辆的全景俯视图;
9、第二获取模块,用于根据全景俯视图,获取目标车辆的行驶范围区域,其中行驶范围区域中包括车位区域和障碍物的接地线点集集合;
10、第三获取模块,用于在车位区域中车位有车位线的情况下,根据全景俯视图,通过车位检测模型,获取车位的角点坐标;
11、状态判断模块,用于根据障碍物的接地线点集集合和角点坐标,确定车位的当前状态,其中当前状态包括已占用状态或未占用状态。
12、本申请实施例的第三方面,提供了一种电子设备,包括存储器、处理器以及存储在存储器中并且可在处理器上运行的计算机程序,该处理器执行计算机程序时实现上述方法的步骤。
13、本申请实施例的第四方面,提供了一种可读存储介质,该可读存储介质存储有计算机程序,该计算机程序被处理器执行时实现上述方法的步骤。
14、本申请实施例的有益效果至少包括:
15、通过获取目标车辆的全景俯视图,使得系统可以通过车辆上安装的视觉传感器来对车辆周围的环境进行感知,并且可以在不使用超声雷达等前提下,就可以完成车位的探测和构建,并且获取到的全景俯视图可以为之后进行数据处理和车位检测提供数据基础;通过根据全景俯视图,获取目标车辆的行驶范围区域,其中行驶范围区域中包括车位区域和障碍物的接地线点集集合,在车辆行驶范围区域构建障碍物的接地线,避免了全景图像中立体障碍物对可行驶空间的遮挡,进而能够准确的探测出具有停车空间的,且能够进行路径规划的车辆行驶范围区域,提高了车位探测的准确性;在车位区域中车位有车位线的情况下,根据全景俯视图,通过车位检测模型,获取车位的角点坐标,并根据障碍物的接地线点集集合和角点坐标,确定车位的当前状态是已占用状态还是未占用状态,这样根据行驶范围区域和车位角点坐标共同检测车位当前状态,可以更加准确的判断当前的车位是否被障碍物或其它车辆占据,解决了当前现有技术中车位识别精度低的技术问题。
技术特征:
1.一种车位状态的检测方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述根据所述全景俯视图,获取所述目标车辆的行驶范围区域,包括:
3.根据权利要求1所述的方法,其特征在于,所述根据所述障碍物的接地线点集集合和所述角点坐标,确定所述车位的当前状态,包括:
4.根据权利要求1所述的方法,其特征在于,所述根据所述障碍物的接地线点集集合和所述角点坐标,确定所述车位的当前状态之后,还包括:
5.根据权利要求1所述的方法,其特征在于,所述获取目标车辆的全景俯视图,包括:
6.根据权利要求1所述的方法,其特征在于,所述根据所述全景俯视图,获取所述目标车辆的行驶范围区域之后,还包括:
7.根据权利要求6所述的方法,其特征在于,所述根据所述车位区域的纵深长度,确定待划分车位的朝向,包括:
8.一种车位状态的检测装置,其特征在于,包括:
9.一种电子设备,包括存储器、处理器以及存储在所述存储器中并且可在所述处理器上运行的计算机程序,其特征在于,所述处理器执行所述计算机程序时实现如权利要求1至7中任一项所述方法的步骤。
10.一种可读存储介质,所述可读存储介质存储有计算机程序,其特征在于,所述计算机程序被处理器执行时实现如权利要求1至7中任一项所述方法的步骤。
技术总结
本申请涉及汽车技术领域,提供了一种车位状态的检测方法、装置、电子设备及可读存储介质。该方法包括:获取目标车辆的全景俯视图;根据全景俯视图,获取目标车辆的行驶范围区域,其中行驶范围区域中包括车位区域和障碍物的接地线点集集合;在车位区域中车位有车位线的情况下,根据全景俯视图,通过车位检测模型,获取车位的角点坐标;根据障碍物的接地线点集集合和角点坐标,确定车位的当前状态,其中当前状态包括已占用状态或未占用状态。本申请解决了车位识别精度低的技术问题。
技术研发人员:牟军勇,李杨,苏星溢
受保护的技术使用者:重庆赛力斯凤凰智创科技有限公司
技术研发日:
技术公布日:2024/6/26
- 还没有人留言评论。精彩留言会获得点赞!