基于节能环保的碳排放节能优化调度系统及方法与流程
本发明涉及节能减排,具体为基于节能环保的碳排放节能优化调度系统及方法。
背景技术:
1、随着全球气候变暖问题日益严重,减少碳排放已成为所有人共识。停车场作为车辆停放和停留的场所,其运营和管理会直接影响车辆的行驶行为和碳排放量。因此,对停车场碳排放进行优化研究,有助于减少城市交通系统的碳排放,降低对环境的影响。
2、现阶段,针对停车场碳排放管理方面,通常采用智能引导的方式来实现最短路径停入车位,降低无效寻位所导致的碳排放增加,这种方法存在一定弊端。一方面,现有技术没有针对不同车辆的碳排放差异进行区分,没有针对车辆不同状态、不同油耗或性能设计方面存在的碳排放差异进行分析,则无法实现碳排放的精准量化。另一方面,现有技术通常只是分别针对每个车辆进行碳排放优化分析,并未考虑停车场的整体碳排放趋势,也未考虑其他车辆出入停车位所带来的等候以及同路线下多个车辆所带来的拥堵,而这些情况都会导致碳排放量的大幅度增加。所以,现阶段需要一种更加高效智能的停车场碳排放优化调度技术方案来解决上述问题。
技术实现思路
1、本发明的目的在于提供基于节能环保的碳排放节能优化调度系统及方法,以解决上述背景技术中提出的问题。
2、为了解决上述技术问题,本发明提供如下技术方案:基于节能环保的碳排放节能优化调度方法,该方法包括以下步骤:
3、s100、采集历史记录、图表信息和停车场的实时视频,对视频信息进行识别从而找到入场对象和影响对象。
4、s200、为每个入场对象规划不同的行驶路线,通过分析影响对象的位置在行驶路线上标注影响点,根据每条行驶路线上影响点数量和位置计算碳排放影响系数。
5、s300、通过碳排放影响系数为每个入场对象选择预选路线和预选车位,不同入场对象的预选车位相同时,计算每个入场对象的优先指数,根据优先指数决定归属。直到所有入场对象的预选车位都不相同时,则将预选路线作为对应入场对象的引导路线。
6、s400、通过停车场指示灯以及车机导航方式为每个入场对象指示各自的引导路线,入场对象按照引导路线前往对应预选车位进行停车操作。
7、在s100中,历史记录是指不同车辆的行驶记录,每条行驶记录包括车牌号、型号、出车时长和停车时长。出车时长是指车辆从启动到完全驶出停车位所花费的时长,停车时长是指车辆从停止前进到完全驶入停车位所花费的时长。图表信息包括停车场规划图、碳排放对照表和油耗对照表。停车场规划图包括所有停车位以及路线分布情况。碳排放对照表包括不同型号车辆在不同状态下碳排放量,状态包括行驶状态和驻车状态。油耗对照表包括不同型号车辆在不同状态下的油耗,油耗包括行驶油耗和怠速油耗。采用目标检测算法实时识别视频画面中的车辆,将最新驶入停车场的车辆作为入场对象并记录时间,将正在驶出或驶入停车位的车辆作为影响对象并记录时间。使用yolo算法和svm算法检测每个对象的车牌并识别车牌号。
8、车辆在驻车状态下燃油不能进行充分燃烧,所产生的排放物与正常行驶状态下产生的排放物存在区别。不同状态下即使是相同单位的燃油燃烧所产生的碳排放量也存在较大差异。碳排放量单位为千克/升。另外,不同型号车辆由于所采用的技术、设计和使用燃油类型存在差异,碳排放量也会存在不同。
9、车辆在不同状态下的油耗计量方式不同,在行驶状态按照距离乘以行驶油耗计算耗油量,行驶油耗单位为升/公里。在驻车状态按照时长乘以怠速油耗计算耗油量,怠速油耗单位为升/分钟。
10、通过视频画面实时监测每个车辆,当监测到停车位上车辆启动准备驶出停车位时,或者路线上车辆在无遮挡情况下停止前进准备驶入停车位时,直接将这些车辆判定为影响对象并记录判定时间。
11、入场对象和影响对象根据识别的行为实时调整,当入场对象停止前进准备驶入停车位时自动调整为影响对象,当影响对象完全驶入或驶出停车位时则取消对象设定。
12、在s200中,具体步骤如下:
13、s201、采用yolo算法分析视频画面中的每个影响对象,将正在驶出停车位的影响对象状态设为出车,将正在驶入停车位的影响对象状态设为停车。根据车牌号在历史记录中分别检索每个影响对象的行驶记录,分别计算这些行驶记录的出车时长平均值作为对应出车状态影响对象的预计时长,以及停车时长平均值作为对应停车状态影响对象的预计时长。
14、s202、分析视频画面中每个入场对象的位置并在停车场规划图中标注,分析视频画面中每个空车位的位置并在停车场规划图中标注。统计所有空车位的数量,以入场对象的位置为起点,每个空车位的位置分别作为终点,从起点到各个终点为每个入场对象分别规划条最短的行驶路线。
15、s203、标记位置处于行驶路线上的影响对象,将行驶路线上标记影响对象的位置标注为影响点。根据影响点数量和位置计算对应行驶路线的碳排放影响系数。为每个入场对象建立路线集合,按照从小到大顺序将每条行驶路线的碳排放影响系数依次放入对应入场对象的路线集合中。
16、在s203中,每条行驶路线的碳排放影响系数具体计算步骤如下:
17、s203-1、统计行驶路线上影响点的数量,按照影响点位置将行驶路线划分为条路径。设置行驶车速,将每条路径的长度分别除以后得到行驶时长。将当前时间减去各标记影响对象的得到消耗时长,各标记影响对象的预计时长减去消耗时长的差作为对应影响点的剩余时长。
18、每条路径对应一个行驶时长,每个影响点对应一个剩余时长,所有影响点对应的剩余时长都是以当前时间作为基础计算得到。设定一个标准时长,当消耗时长大于或等于预计时长时,表示影响点对应的影响对象超过预计时长仍未脱离出车或停车状态,将标准时长作为对应影响点的剩余时长。
19、s203-2、按照行驶路线的起点到终点方向,依次判断第一条路径的行驶时长是否小于第一个影响点的剩余时长。小于则将减去的差作为对应影响点的等待时长,不小于则将对应影响点的等待时长设为零。将加上的和得到第一条路径的预测时长,再次判断第二条路径的行驶时长加上的和是否小于第二个影响点的剩余时长,小于则将减去后再减去的差作为对应影响点的等待时长,不小于则将对应影响点的等待时长设为零。以此类推,直到行驶路线上所有影响点都设有等待时长。
20、不断重复判断影响点h1之前所有路径的行驶时长之和加上所有影响点的等待时长之和是否小于影响点h1的剩余时长,从而设定影响点h1的等待时长。
21、s203-3、获取行驶路线对应入场对象的型号,在碳排放对照表中检索型号车辆在行驶状态下的碳排放量和驻车状态下的碳排放量,在油耗对照表中检索型号车辆的行驶油耗和怠速油耗。将行驶路线下所有路径长度求和得到以及所有影响点的等待时长求和得到后,代入公式中计算碳排放影响系数:
22、
23、式中,为碳排放影响系数,和为常数。
24、在s300中,具体步骤如下:
25、s301、获取每个入场对象的路线集合,选择路线集合中碳排放影响系数最小的行驶路线作为对应入场对象的预选路线,预选路线对应停车位作为入场对象的预选车位,分析不同入场对象的预选车位是否相同,都不相同则将每条预选路线分别作为对应入场对象的引导路线。存在相同情况则将对应预选车位作为冲突车位,获取其中一个冲突车位对应的所有入场对象并进行标记,所有标记入场对象代入s302步骤。
26、s302、路线集合中选择碳排放影响系数次小的行驶路线作为对应标记入场对象的备选路线,备选路线对应停车位作为标记入场对象的备选车位。分析停车场规划图中路线的分布情况,标注停车场出入口以及每个分岔口的位置,将路线划分为不同的路段,确保每个路段中没有分岔口,只有入口和出口相连接。
27、s303、设定预测时间集合,分析在时刻下所有入场对象按照各自的预选路线行驶时瞬时位置所处的路段,统计每个路段各个时刻下存在的入场对象数量,分析标记入场对象各个时刻下所处的路段,以及标记入场对象按照备选路线行驶时各个时刻下所处的路段,代入公式中计算每个标记入场对象的拥堵变化系数:
28、
29、式中,为拥堵变化系数,为标记入场对象按照备选路线行驶时在时刻下所处路段存在的入场对象数量,为标记入场对象按照预选路线行驶时在时刻下所处路段存在的入场对象数量。
30、所有入场对象按照各自的预选路线行驶时不同时刻下的瞬时位置同样需要受到各影响点的等待时长限制,并非按照理想状态下各路径的行驶时长之和进行分析。
31、标记入场对象w1按照备选路线行驶并非指所有标记入场对象都按照备选路线行驶,而是将所有入场对象按照各自的预选路线行驶时瞬时位置所处的路段作为基础数据,w1按照备选路线行驶时各个时刻下所处的路段ld,在基础数据中获取这些路段ld所存在的入场对象数量,从而计算拥堵变化系数。
32、拥堵变化系数表示标记入场对象从对应路线集合中碳排放影响系数最小的行驶路线切换到碳排放影响系数次小的行驶路线时,在各个时刻下所处路段存在的入场对象数量变化情况,既拥堵变化情况。拥堵变化系数为正数表示切换的行驶路线更加拥堵,拥堵变化系数为负数表示切换的行驶路线更加宽松。
33、s304、获取每个标记入场对象的路线集合中最小碳排放影响系数和次小碳排放影响系数,代入公式计算每个标记入场对象的优先指数。公式如下:
34、
35、式中,为优先指数,为常数。优先指数最高的标记入场对象的路线集合保持不变,删除其他标记入场对象的路线集合中的最小碳排放影响系数。删除完成后取消所有入场对象的标记,再次进入s301步骤。
36、优先指数表示标记入场对象切换行驶路线所导致的碳排放影响系数增加幅度、路线拥堵变化幅度以及入场时间变化。旨在为早入场、碳排放影响系数增加幅度大以及路线拥堵变化幅度大的标记入场对象优先匹配预选车位,减少车辆在停车场内长时间滞留、拥堵和长距离行驶所导致的碳排放量增加幅度。
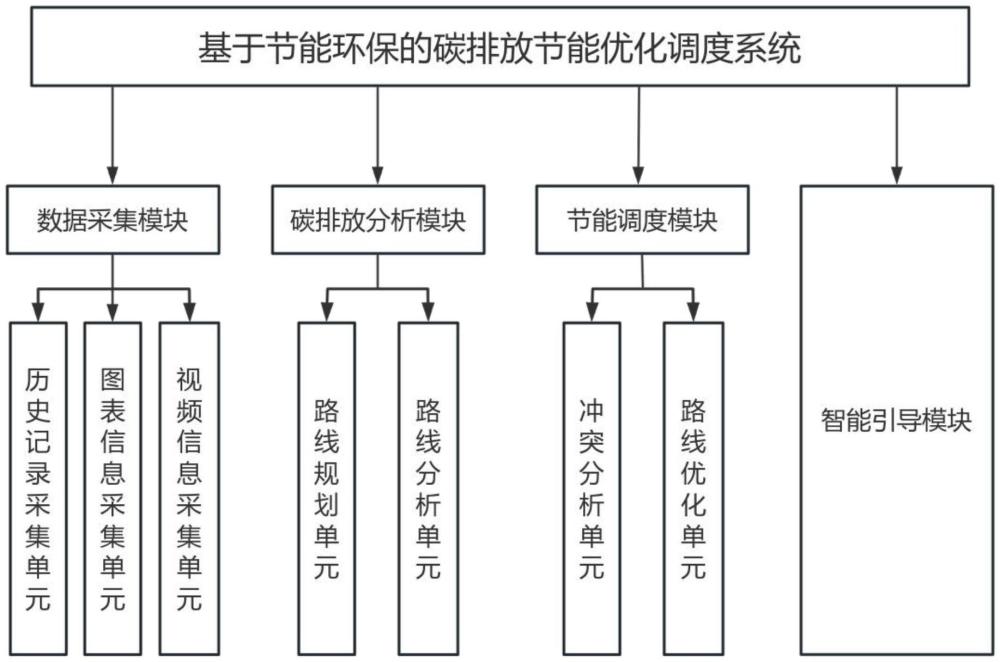
37、基于节能环保的碳排放节能优化调度系统,该系统包括数据采集模块、碳排放分析模块、节能调度模块和智能引导模块。
38、数据采集模块用于采集历史记录、图表信息和停车场的实时视频。碳排放分析模块根据实时视频找到入场对象,为每个入场对象规划行驶路线并标注影响点,根据影响点数量和位置计算行驶路线的碳排放影响系数。节能调度模块通过碳排放影响系数为每个入场对象选择预选路线和预选车位,不同入场对象的预选车位相同时,通过计算优先指数决定归属。当所有入场对象的预选车位都不相同时,则将预选路线作为对应入场对象的引导路线。智能引导模块用于指示引导路线并引导入场对象前往对应预选车位。
39、数据采集模块包括历史记录采集单元、图表信息采集单元和视频信息采集单元。
40、历史记录采集单元用于采集不同车辆的行驶记录,每条行驶记录包括车牌号、型号、出车时长和停车时长。
41、图表信息采集单元用于采集停车场规划图、碳排放对照表和油耗对照表。停车场规划图包括所有停车位以及路线分布情况。碳排放对照表包括不同型号车辆在不同状态下的碳排放量,状态包括行驶状态和驻车状态。油耗对照表包括不同型号车辆在不同状态下的油耗,油耗包括行驶油耗和怠速油耗。视频信息采集单元用于采集停车场的实时视频。
42、碳排放分析模块包括路线规划单元和路线分析单元。
43、路线规划单元用于规划行驶路线。
44、首先,分析视频画面中的车辆并识别车牌号,将最新驶入停车场的车辆作为入场对象并记录时间,将正在驶出或驶入停车位的车辆作为影响对象并记录时间。其次,根据车牌号在历史记录中分别检索每个影响对象的行驶记录,计算这些行驶记录的出车时长平均值或停车时长平均值并作为对应影响对象的预计时长。最后,分析视频画面中所有入场对象和空车位的位置并在停车场规划图中标注,以入场对象的位置为起点,每个空车位的位置分别作为终点,从起点到各个终点为每个入场对象分别规划行驶路线。
45、路线分析单元用于计算碳排放影响系数。先标记位置处于行驶路线上的影响对象,将行驶路线上标记影响对象的位置标注为影响点。再根据影响点数量和位置计算对应行驶路线的碳排放影响系数。为每个入场对象建立路线集合,按照从小到大顺序将每条行驶路线的碳排放影响系数依次放入对应入场对象的路线集合中。
46、节能调度模块包括冲突分析单元和路线优化单元。
47、冲突分析单元用于识别冲突车位。将路线集合中碳排放影响系数最小的行驶路线作为对应入场对象的预选路线,预选路线对应停车位作为入场对象的预选车位,不同入场对象的预选车位都不相同情况下,则将每条预选路线分别作为对应入场对象的引导路线。预选车位存在相同情况则将对应预选车位作为冲突车位,将其中一个冲突车位对应的所有入场对象进行标记。
48、路线优化单元用于优化标记入场对象的预选路线。
49、首先,选择路线集合中碳排放影响系数次小的行驶路线作为对应标记入场对象的备选路线,备选路线对应停车位作为标记入场对象的备选车位。将停车场规划图中路线划分为没有分岔口的各个不同路段。
50、其次,设定预测时间集合,分析在时刻下所有入场对象按照各自的预选路线行驶时瞬时位置所处的路段,以及标记入场对象按照备选路线行驶时各个时刻下所处的路段,代入公式:中,计算每个标记入场对象的拥堵变化系数。其中,为标记入场对象按照备选路线行驶时在时刻下所处路段存在的入场对象数量,为标记入场对象按照预选路线行驶时在时刻下所处路段存在的入场对象数量。
51、最后,将每个标记入场对象的路线集合中最小碳排放影响系数和次小碳排放影响系数代入公式:中,计算每个标记入场对象的优先指数;优先指数最高的标记入场对象的路线集合保持不变,删除其他标记入场对象的路线集合中的最小碳排放影响系数。删除完成后取消所有入场对象的标记,再次进入冲突分析单元。其中,为常数,为当前时间。
52、智能引导模块通过停车场指示灯以及车机导航方式,为每个入场对象展示对应的引导路线,入场对象按照引导路线前往对应预选车位停车。
53、与现有技术相比,本发明所达到的有益效果是:
54、1、智能的碳排放预测:本技术中结合车辆自身状态和油耗的影响以及外部其他车辆干扰的影响,综合计算每条行驶路线的碳排放影响系数,根据碳排放影响系数选取预选路线,相比于传统技术的最短路径实现最低碳排放更加智能可靠。
55、2、高效的等候拥堵分析:本技术中在面临车位冲突情况,通过分析各标记入场对象切换路线所导致的碳排放影响系数增加幅度、路线拥堵变化幅度以及入场时间变化,基于停车场整体碳排放优化方面的考量来决定车位归属,相比于传统技术按时间先后锁定更加高效。
56、综上所述,本发明相比于传统技术具有智能的碳排放预测和高效的等候拥堵分析优势,能够提高停车场碳排放优化调度效率。
- 还没有人留言评论。精彩留言会获得点赞!