一种基于图像处理的安全辅助驾驶方法及系统与流程
本发明属行车安全辅助驾驶,具体涉及一种基于图像处理的安全辅助驾驶方法及系统。
背景技术:
1、随着全球范围内经济的发展,人们的生活质量越来越高,汽车的保有量也逐年大幅度的增长,作为衣食住行中不可或缺的一部分,交通与人的联系越来越密切,同时交通问题也日益凸显,其中,交通事故的发生备受人们的关注,由此诞生了行车的安全辅助驾驶系统,安全辅助驾驶系统可以对车辆行驶时周围的危险态势进行实时监测,并对采集的信息进行分析与处理,当发现某种状态对车辆行驶的安全产生威胁时,系统会及时发出警报信号,提醒司机注意并进行处理,安全辅助驾驶系统特别在预防行驶中的车辆发生碰撞方面,能够发挥重要的作用。然而,现有技术中的安全辅助驾驶系统往往只通过监测自身车辆与前方车辆的车距,来向司机发出防撞预警信息,却不考虑该前方车辆的前方车辆的相关情况,导致系统预警的智能化程度不高,系统发挥预警作用有限的问题。
技术实现思路
1、针对上述提出的技术问题,本发明提供一种基于图像处理的安全辅助驾驶方法及系统,通过图像测距技术计算自身车辆与其前方车辆的实时距离,并且根据自身车辆的前方车辆的前方车辆是否存在的不同情况,分别计算自身车辆与其前方车辆的最小安全距离,进而在自身车辆行驶的过程中进行防撞预警,提高安全辅助驾驶系统预警的智能化程度,同时具有预警及时、准确度高的优点。
2、为了实现上述的发明目的,给出如下所述的一种基于图像处理的安全辅助驾驶方法,通过以下步骤来实现:
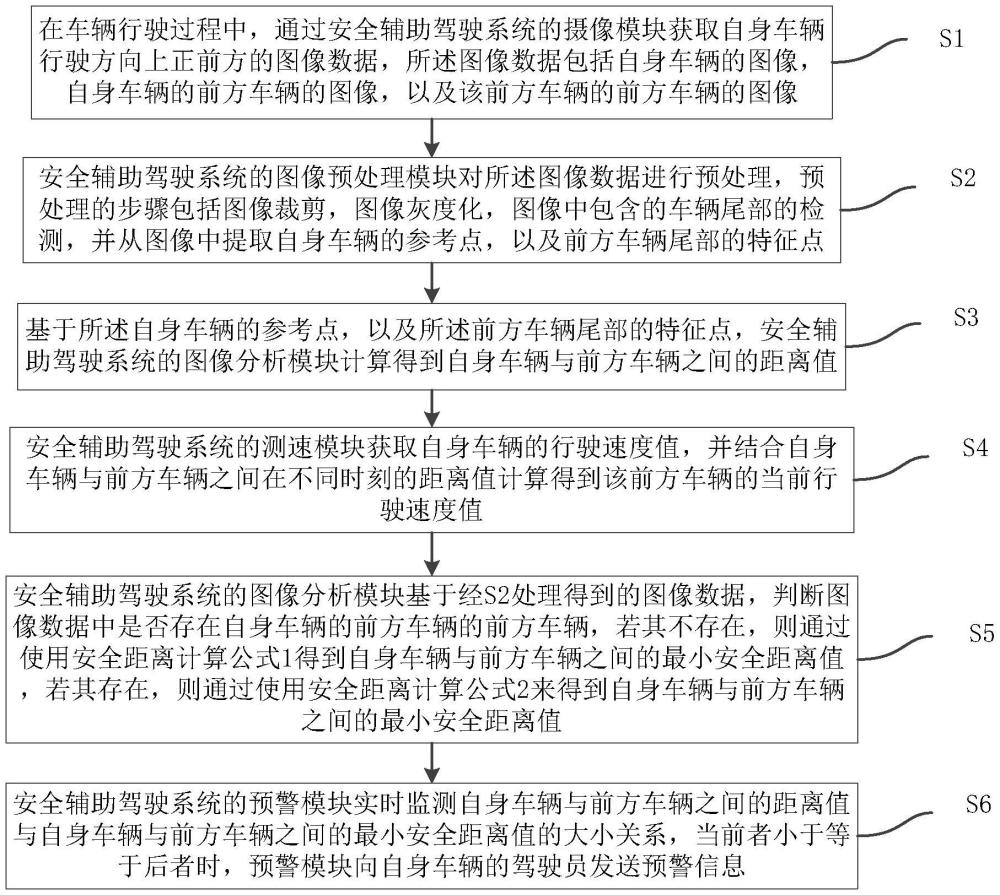
3、步骤一、在车辆行驶过程中,通过安全辅助驾驶系统的摄像模块获取自身车辆行驶方向上正前方的图像数据,所述图像数据包括自身车辆的图像,自身车辆的前方车辆的图像,以及该前方车辆的前方车辆的图像;
4、步骤二、安全辅助驾驶系统的图像预处理模块对所述图像数据进行预处理,预处理的步骤包括图像裁剪,图像灰度化,图像中包含的车辆尾部的检测,并从图像中提取自身车辆的参考点,以及前方车辆尾部的特征点;
5、步骤三、基于所述自身车辆的参考点,以及所述前方车辆尾部的特征点,安全辅助驾驶系统的图像分析模块计算得到自身车辆与前方车辆之间的距离值;
6、步骤四、安全辅助驾驶系统的测速模块获取自身车辆的行驶速度值,并结合自身车辆与前方车辆之间在不同时刻的距离值计算得到该前方车辆的当前行驶速度值;
7、步骤五、安全辅助驾驶系统的图像分析模块基于经上述步骤二处理得到的图像数据,判断图像数据中是否存在自身车辆的前方车辆的前方车辆,若其不存在,则通过使用安全距离计算公式1得到自身车辆与前方车辆之间的最小安全距离值,若其存在,则通过使用安全距离计算公式2来得到自身车辆与前方车辆之间的最小安全距离值;
8、步骤六、安全辅助驾驶系统的预警模块实时监测自身车辆与前方车辆之间的距离值与自身车辆与前方车辆之间的最小安全距离值的大小关系,当前者小于等于后者时,预警模块向自身车辆的驾驶员发送预警信息。
9、作为本发明的一种优选技术方案,步骤四中通过如下的公式计算得到自身车辆的前方车辆在当前时刻的行驶速度值v1:
10、
11、其中,sn为当前时刻下自身车辆与前方车辆之间的距离值,sn-1为当前时刻的前一时刻下自身车辆与前方车辆之间的距离值,δt为当前时刻与其前一时刻的时间间隔,v0为自身车辆的行驶速度值。
12、作为本发明的一种优选技术方案,步骤五中所述安全距离计算公式1的具体描述如下:
13、
14、其中,l为自身车辆与前方车辆之间的最小安全距离值,v0为自身车辆的行驶速度值,a0为自身车辆的刹车加速度值,t0为自身车辆的驾驶员的反应时间值,v1为自身车辆的前方车辆的行驶速度值,a1为自身车辆的前方车辆的刹车加速度值。
15、作为本发明的一种优选技术方案,步骤六中所述安全距离计算公式2的具体描述如下:
16、
17、其中,l为自身车辆与前方车辆之间的最小安全距离值,v0为自身车辆的行驶速度值,a0为自身车辆的刹车加速度值,t0为自身车辆的驾驶员的反应时间值,v1为自身车辆的前方车辆的行驶速度值,a1为自身车辆的前方车辆的刹车加速度值,t1为自身车辆的前方车辆的驾驶员的反应时间值。
18、与现有技术相比,本发明的有益效果如下:
19、本发明首先获取自身车辆行驶方向上正前方的图像数据,并从图像中提取出自身车辆的参考点和前方车辆尾部的特征点,还基于参考点和特征点,计算自身车辆与前方车辆之间的距离,然后获取自身车辆的行驶速度,并结合自身车辆与前方车辆的距离值计算该前方车辆的当前行驶速度,接着依据图像中是否存在自身车辆的前方车辆的前方车辆的不同情况,分别计算自身车辆与前方车辆之间的最小安全距离,最后基于自身车辆与前方车辆之间的距离和他们之间的最小安全距离在自身车辆的行车过程中进行防撞预警。本发明解决了现有技术中的安全辅助驾驶系统往往只通过监测自身车辆与前方车辆的车距,来向司机发出防撞预警信息,却不考虑该前方车辆的前方车辆的相关情况,导致系统预警的智能化程度不高,系统发挥预警作用有限的问题,同时本发明具有系统预警及时、预警准确度高的优点。
技术特征:
1.一种基于图像处理的安全辅助驾驶方法,其特征在于,包括如下步骤:
2.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s4中通过如下的公式计算得到自身车辆的前方车辆在当前时刻的行驶速度值v1:
3.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s5中所述安全距离计算公式1的具体描述如下:
4.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s5中所述安全距离计算公式2的具体描述如下:
5.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s2中安全辅助驾驶系统的图像预处理模块对图像数据进行预处理,具体包括如下步骤:
6.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s3中计算自身车辆与前方车辆之间的距离值,具体包括如下步骤:
7.根据权利要求1所述的一种基于图像处理的安全辅助驾驶方法,其特征在于,s5中在经s2处理得到的图像数据内,通过获取图像中与车辆尾部相对应的矩形区域的个数来判断图像中是否存在自身车辆的前方车辆的前方车辆,具体地,当矩形区域的个数为1时,即不存在自身车辆的前方车辆的前方车辆,当矩形区域的个数大于1时,即存在自身车辆的前方车辆的前方车辆。
8.一种基于图像处理的安全辅助驾驶系统,用于实现如权利要求1-7任一项所述的方法,其特征在于,包括如下模块:
技术总结
本发明属于行车安全辅助驾驶技术领域,提出了一种基于图像处理的安全辅助驾驶方法及系统,该方法包括:S1、获取自身车辆行驶方向上正前方的图像数据;S2、对图像数据进行预处理,并提取出自身车辆的参考点和前方车辆尾部的特征点;S3、基于自身车辆的参考点,及前方车辆尾部的特征点,计算自身车辆与前方车辆之间的距离;S4、获取自身车辆的行驶速度,并结合自身车辆与前方车辆的距离值计算该前方车辆的当前行驶速度;S5、依据图像数据中是否存在自身车辆的前方车辆的前方车辆的不同情况,分别计算自身车辆与前方车辆之间的最小安全距离;S6、在自身车辆的行车过程中进行防撞预警,本发明具有系统预警智能化,且预警及时、准确度高的优点。
技术研发人员:赵瑞,袁鹏伟,王学彪
受保护的技术使用者:河南小宇宙网络科技有限公司
技术研发日:
技术公布日:2024/8/20
- 还没有人留言评论。精彩留言会获得点赞!