一种面向网联协同驾驶的交叉口拓扑网络动态构建方法与流程
本发明涉及智能交通系统和车联网,具体涉及一种面向网联协同驾驶的交叉口拓扑网络动态构建方法。
背景技术:
1、在现代城市交通管理的背景下,交通系统的运行效率和安全性受到广泛关注。传统的静态交通拓扑管理策略,虽然基于预设的路网模型和固定的信号控制逻辑,通过经验性的交通流量预测和历史数据分析,为日常的交通流量监控和车辆导航提供了基础功能,如交通信号控制和基本的交通诱导系统。然而,这些系统在面对实时变化的交通状况时,其局限性逐渐显现。
2、首先,传统的静态交通管理系统主要依赖于被动式和反应式的工作机制,它们通常只能在交通拥堵发生后进行干预,缺乏预见性和动态调整能力。这意味着,在交通流量激增或突发事件发生时,系统难以及时作出有效响应,导致交通拥堵的加剧和安全隐患的增加。
3、其次,随着网联车辆的普及,现代交通系统产生了大量的实时数据,这些数据包含了车辆的位置、速度、行驶意图等关键信息。然而,传统的静态交通管理系统往往未能充分利用这些实时数据,导致交通管理的决策缺乏数据支撑,难以达到最优效果。
4、再者,静态的拓扑结构和信号控制逻辑在面对实时变化的交通个体时(如单辆网联车),其调控效果受限。尤其是在高峰时段或复杂交通场景中,车辆间的潜在冲突增多,而传统的系统由于缺乏对车辆意图和即时状态(位置、速度、方向变化等)的实时分析与响应机制,难以有效应对这些挑战,导致交通流动性和道路安全性的下降。
5、因此,有必要对现有的交通管理系统进行革新。本发明提出了一种面向网联协同驾驶的交叉口拓扑网络动态构建方法。该方法通过实时收集和分析交叉口一定范围内的车辆的位置、速度和行驶意图等关键数据,实现交通拓扑的动态调整。这种动态拓扑不仅能够清晰地反映车辆间的潜在冲突状况,还能为网联车辆的交叉口调控系统提供有力支持,从而提高交叉口的安全性,有效减少交通延误和拥堵,提升整个交通系统的韧性和效率。
技术实现思路
1、针对现有技术存在的不足,本发明提出一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,以解决现有技术中存在的的技术问题。
2、本发明采用的技术方案是,一种面向网联协同驾驶的交叉口拓扑网络动态构建方法。
3、在第一种可实现方式中,一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,包括:
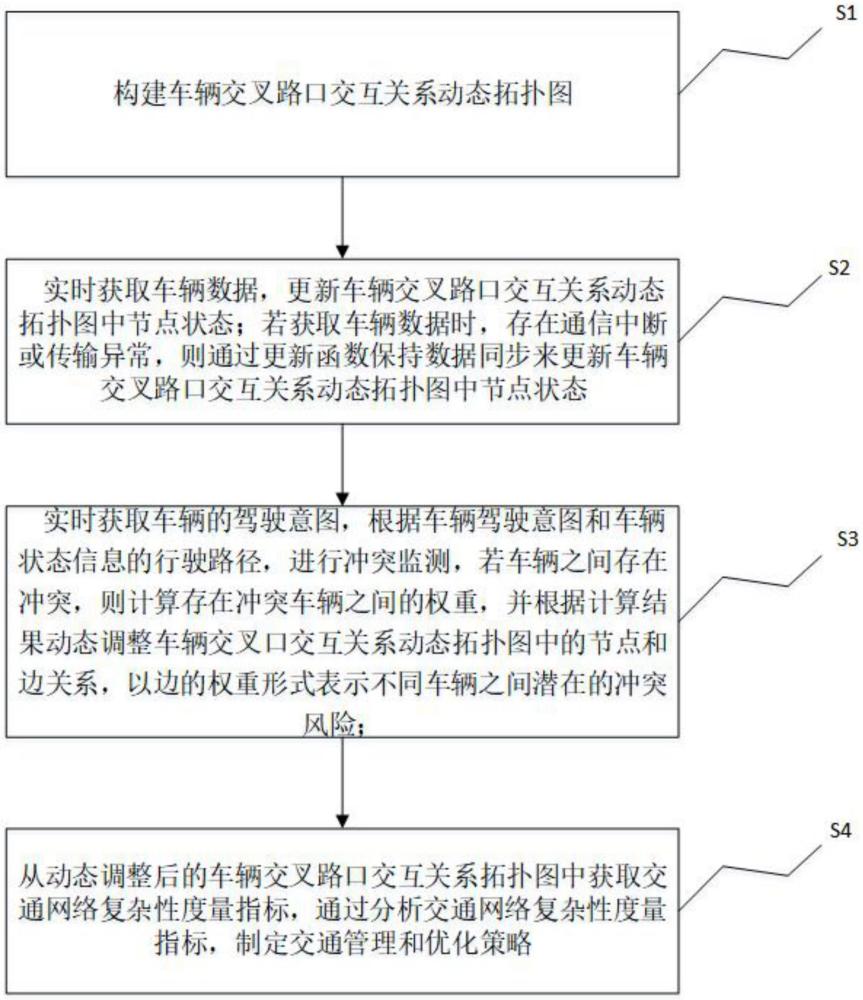
4、构建车辆交叉口交互关系动态拓扑图;
5、实时获取车辆数据,更新车辆交叉口交互关系动态拓扑图中节点状态;
6、实时获取车辆的驾驶意图,根据车辆驾驶意图和车辆状态信息的行驶路径,进行冲突监测,若车辆之间存在冲突,则计算存在冲突车辆之间的权重,并根据计算结果动态调整车辆交叉口交互关系动态拓扑图中的节点和边关系,以边的权重形式表示不同车辆之间潜在的冲突风险;
7、从动态调整后的车辆交叉口交互关系拓扑图中获取交通网络复杂性度量指标,通过分析交通网络复杂性度量指标,制定交通管理和优化策略。
8、结合第一种可实现方式,在第二种可实现方式中,所述车辆交叉口交互关系动态拓扑图,表示为:
9、g(t)=(v(t),e(t))
10、其中,v(t)为车辆节点集合,e(t)为边的集合;
11、在车辆交叉口交互关系动态拓扑图中,第i辆车的vi是图g(t)中的一个节点,节点之间的连接边为车辆之间的潜在交互或冲突风险,每对车辆之间的潜在交互或冲突由一条边eij表示。
12、结合第一种可实现方式,在第三种可实现方式中,所述车辆数据包括:车辆的位置、速度、加速度以及来自其他车辆或路侧设备传感器数据。
13、结合第一种可实现方式,在第四种可实现方式中,若在获取车辆数据时,存在通信中断或传输异常,则通过更新函数保持数据同步来更新车辆交叉口交互关系动态拓扑图中节点状态。
14、结合第四种可实现方式,在第五种可实现方式中,所述更新函数,表示为:
15、
16、其中,pi(t)为车辆i的位置,和分别为车辆的速度和加速度向量。
17、结合第一种可实现方式,在第六种可实现方式中,所述获取车辆的驾驶意图,通过图像识别技术捕捉车辆转向灯的状态,从而判断并获取车辆的驾驶意图。
18、结合第一种可实现方式,在第七种可实现方式中,所述冲突类型包括:直行冲突和转弯冲突。
19、结合第七种可实现方式,在第八种可实现方式中,所述直行冲突,表示为:
20、
21、所述转弯冲突,表示为:
22、
23、其中,pc为预设冲突点,和分别表示车辆速度,τ为调整时间敏感度的参数,用于控制冲突概率随时间差变化的速度;τ值越大,时间差δt对冲突概率的影响越小,pi(t)为车辆i的位置,pj(t)为车辆j的位置。
24、结合第八种可实现方式,在第九种可实现方式中,所述若车辆之间存在冲突,则计算存在冲突车辆之间的权重,具体为:
25、
26、
27、其中,ψi,ψj表示驾驶意图,k为权重系数,根据不同的交通流量或天气条件进行调整,wij为边eij的权重。
28、结合第九种可实现方式,在第十种可实现方式中,所述交通网络复杂性度量指标,包括:度degree、加权度weighted degree、密度density、聚类系数clusteringcoefficient和局部效率local efficiency。
29、由上述技术方案可知,本发明的有益技术效果如下:
30、1.增强网联车辆的冲突消解效率:提供实时的交通流态、交通拓扑网络和潜在冲突点信息,为云控平台和可变情报板等制定冲突消解策略提供依据,从而减少事故率。
31、2.促进安全性和预防交通事故:提前警示网联车辆潜在的碰撞风险,使车辆能够提前作出反应或调整行驶策略,显著提高道路安全性。
32、3.优化道路网络资源利用:动态拓扑模型允许云端/路端根据当前网络状态引导网联车辆调整速度和路线以减少在高风险区域的车辆密度,从而平衡负载并降低网络拥塞。
33、4.支持可持续交通发展:有助于减少车辆的不必要刹车和等待,降低能耗和排放,支持环境友好型和可持续的交通系统发展。
技术特征:
1.一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,包括:
2.根据权利要求1所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述车辆交叉口交互关系动态拓扑图,表示为:
3.根据权利要求1所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述车辆数据包括:车辆的位置、速度、加速度以及来自其他车辆或路侧设备传感器数据。
4.根据权利要求1所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,若在获取车辆数据时,存在通信中断或传输异常,则通过更新函数保持数据同步来更新车辆交叉口交互关系动态拓扑图中节点状态。
5.根据权利要求4所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述更新函数,表示为:
6.根据权利要求1所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述获取车辆的驾驶意图,通过图像识别技术捕捉车辆转向灯的状态,从而判断并获取车辆的驾驶意图。
7.根据权利要求1所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述冲突包括:直行冲突和转弯冲突。
8.根据权利要求7所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述直行冲突,表示为:
9.根据权利要求8所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述若车辆之间存在冲突,则计算存在冲突车辆之间的权重,具体为:
10.根据权利要求9所述的一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,其特征在于,所述交通网络复杂性度量指标,包括:度、加权度、密度、聚类系数和局部效率。
技术总结
本发明提供一种面向网联协同驾驶的交叉口拓扑网络动态构建方法,包括:构建车辆交叉口交互关系动态拓扑图;实时获取车辆数据,更新拓扑图中节点状态;实时获取车辆的驾驶意图,根据车辆驾驶意图和车辆状态信息的行驶路径,进行冲突监测,若车辆之间存在冲突,则计算存在冲突车辆之间的权重,并根据计算结果动态调整车辆交叉口交互关系动态拓扑图中的节点和边关系,以边的权重形式表示不同车辆之间潜在的冲突风险;从动态调整后的拓扑图中获取交通网络复杂性度量指标,通过分析交通网络复杂性度量指标,制定交通管理和优化策略。本发明能提高交叉口的安全性,有效减少交通延误和拥堵,提升整个交通系统的韧性和效率。
技术研发人员:伍雅洁,叶青,朱湧,骆中斌,李敏,王少飞,唐荣娇,宋浪
受保护的技术使用者:招商局重庆交通科研设计院有限公司
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!