一种基于多元数据采集的车型识别系统
本发明涉及智能交通车辆检测,具体为一种基于多元数据采集的车型识别系统。
背景技术:
1、在数据智能化时代,智能交通系统的道路信息感知是前端获取道路交通信息的关键部分,提供丰富信息的交通数据。道路信息感知主要涉及车流量、车速、车辆类型等信息检测;随着汽车文化的普及和消费者个性化需求的增加,车辆改装市场呈现出快速增长的趋势,车辆改装类型包括外观改装、内饰改装、动力改装、底盘改装等,其中外观改装和内饰改装最为常见,车辆改装是有严格的规定,但是,依然存在一些车主为了特定目的对其进行非法改装。
2、针对非法改装的车辆,由于车辆改装信息不透明,车主在进行车辆改装时,往往不会向相关部门进行备案,导致相关部门无法掌握车辆的改装情况,而现有的对于车辆改装的筛查技术还比较落后,主要依靠人工检查和经验判断,效率低下,容易出现漏检和误检的情况,因此,针对上述问题提出一种基于多元数据采集的车型识别系统。
技术实现思路
1、本发明的目的在于提供一种基于多元数据采集的车型识别系统,以解决上述背景技术中提出的问题。
2、为实现上述目的,本发明提供如下技术方案:
3、一种基于多元数据采集的车型识别系统,包括:
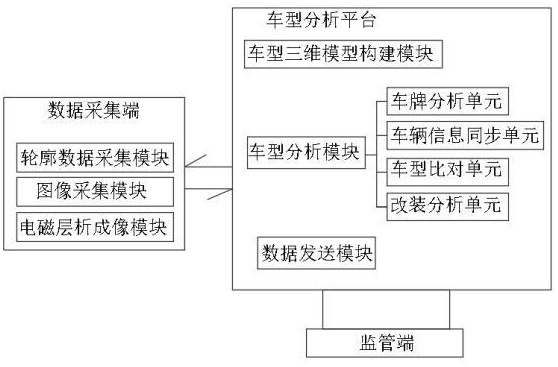
4、数据采集端;数据采集端包括轮廓数据采集模块、图像采集模块和电磁层析成像模块,轮廓数据采集模块利用三维轮廓扫描设备对车辆外部轮廓进行扫描,得到车辆外形的三维轮廓扫描数据;图像采集模块利用图像采集设备对车辆外观进行图像采集,得到车辆外观的图像数据;电磁层析成像模块通过电磁层析成像技术获取车辆的内部结构信息,得到车辆内部配件的3d图像;
5、车型分析平台;车型分析平台包括车型三维模型构建模块、车型分析模块和数据发送模块;
6、车型三维模型构建模块分别接收三维轮廓扫描数据、车辆外观的图像数据和车辆内部配件的3d图像,利用三维轮廓扫描数据建立车辆外形的车型三维模型;根据车辆外观的图像数据建立车辆外形的色彩三维模型;将车辆外形的车型三维模型、车辆外形的色彩三维模型及车辆内部配件的3d图像转换成统一的坐标系中,将车辆外形的车型三维模型、车辆外形的色彩三维模型及车辆内部配件的3d图像融合到同一坐标系中进行融合,得到车辆完整的待测车型三维模型;
7、车型分析模块包括车牌分析单元、车辆信息同步单元、车型比对单元和改装分析单元;
8、车牌分析单元接收车辆外观的图像数据后,根据车牌特征提取车牌的特征图像,得到车辆的车牌数据;
9、车辆信息同步单元根据车牌信息调取车管所登记的对应车牌信息的备案车型数据;
10、车型比对单元根据备案车型数据调取对应车辆备案时厂家的数据信息建立标准三维车型模型,对标准三维车型模型和待测车型三维模型进行数据比对,提取存在差异的车型特征;
11、改装分析单元对检测到的存在差异的车型特征进行分析,判断每个存在差异的车型特征属于合法改装或非法改装,生成车辆改装的详细报告;
12、数据发送模块同步车辆改装的详细报告后,将异常的车型特征标记在待测车型三维模型,得到完成检测的车型三维模型,将车辆的车牌数据及车牌数据对应的车主信息与完成检测的车型三维模型进行数据打包后,按照指定的格式和协议,发送到目标系统或用户。
13、优选的,三维轮廓扫描设备包括设置在龙门架上的激光雷达及设置在龙门架顶部及左右两侧的三维轮廓扫描相机,利用激光雷达从远距离开始对目标车辆进行扫描,激光雷达发射出的激光束快速获取车辆的大致轮廓和位置信息,以时间为轴线不断对车辆的轮廓数据进行叠加处理,得到车辆的初始轮廓数据,其中,初始轮廓数据包括边缘、轮廓线、角点,当车辆靠近时,启动三维轮廓扫描相机进行近距离的精细扫描,得到车辆车身精细的表面轮廓数据,其中,车身精细的表面轮廓数据包括纹理特征、表面曲率特征和局部形状特征。
14、优选的,车辆外形的车型三维模型在建立时,分别接收车辆的初始轮廓数据和车辆车身精细的表面轮廓数据,提取初始轮廓数据中的边缘、轮廓线和角点以及表面轮廓数据中的纹理特征、表面曲率特征和局部形状特征,计算不同来源特征描述符之间的相似度,如果两个特征的描述符之间的相似度超过了预先设定的阈值,确定为匹配,将车辆的初始轮廓数据和车辆车身精细的表面轮廓数据转换到一个统一的坐标系中,以匹配的描述符为基础,将车辆的初始轮廓数据和车辆车身精细的表面轮廓数据进行融合,得到车辆外形的车型三维模型。
15、优选的,图像采集设备为高清摄像头,高清摄像头均匀分布在龙门架的四周,以捕捉车辆各个方位的图像,对采集的车辆图像进行裁剪、旋转矫正变形后,利用canny算法,提取车型的轮廓边缘,后对车型的轮廓图像进行特征识别,将车型中车辆的特征点进行识别,并将识别的特征点进行分割;构建基本几何体,将特征点同步到基本几何体上,得到车辆外形的色彩三维模型。
16、优选的,电磁层析成像模块包括均匀排布在龙门架上的六个以上的电磁线圈、通道切换单元、功率放大单元、信号采集单元和嵌入式控制单元,电磁线圈的直径为标准小轿车车身长的三分之一,六个以上的电磁线圈中的一个电磁线圈为激励线圈,六个以上的电磁线圈中其余的电磁线圈均为检测线圈;
17、信号采集单元将检测到的感应电压进行放大和滤波,获得信噪比较高的电压信号;
18、嵌入式控制单元内置dac产生100khz的激励电压,并输入至功率放大单元;嵌入式控制单元发送指令至通道切换单元,控制功率放大单元输出的激励电流流入激励线圈中,并且控制剩下n-1个检测线圈的电压输入至信号采集单元的输入;嵌入式控制单元内置adc对已通过信号采集单元后信噪比较高的电压信号进行采样,提取每一个检测线圈感应电压的幅值,获得nx(n-1)个电压幅值,并且传输至重建图像计算机;重建图像计算机运行重建算法重建通过龙门架车辆的3d图像。
19、与现有技术相比,本发明的有益效果是:通过三维轮廓扫描设备、图像采集设备和电磁层析成像模块,全面采集车辆的外部轮廓、外观图像和内部结构信息,相较于现有的车型识别技术,数据采集全面,车型分析平台根据采集的数据,构建车型三维模型,并与备案车型数据进行比对,分析车辆的改装情况,生成详细报告,相较于现有的车型识别技术,能够将车辆的改装部分进行检测,数据发送模块将车辆的车牌数据、车主信息和完成检测的车型三维模型进行数据打包后,按照指定的格式和协议发送到目标系统或用户,数据发送便捷。
技术特征:
1.一种基于多元数据采集的车型识别系统,其特征在于:
2.根据权利要求1所述的基于多元数据采集的车型识别系统,其特征在于:所述三维轮廓扫描设备包括设置在龙门架上的激光雷达及设置在龙门架顶部及左右两侧的三维轮廓扫描相机,利用激光雷达从远距离开始对目标车辆进行扫描,激光雷达发射出的激光束快速获取车辆的大致轮廓和位置信息,以时间为轴线不断对车辆的轮廓数据进行叠加处理,得到车辆的初始轮廓数据,其中,初始轮廓数据包括边缘、轮廓线、角点,当车辆靠近时,启动三维轮廓扫描相机进行近距离的精细扫描,得到车辆车身精细的表面轮廓数据,其中,车身精细的表面轮廓数据包括纹理特征、表面曲率特征和局部形状特征。
3.根据权利要求2所述的基于多元数据采集的车型识别系统,其特征在于:所述车辆外形的车型三维模型在建立时,分别接收车辆的初始轮廓数据和车辆车身精细的表面轮廓数据,提取初始轮廓数据中的边缘、轮廓线和角点以及表面轮廓数据中的纹理特征、表面曲率特征和局部形状特征,计算不同来源特征描述符之间的相似度,如果两个特征的描述符之间的相似度超过了预先设定的阈值,确定为匹配,将车辆的初始轮廓数据和车辆车身精细的表面轮廓数据转换到一个统一的坐标系中,以匹配的描述符为基础,将车辆的初始轮廓数据和车辆车身精细的表面轮廓数据进行融合,得到车辆外形的车型三维模型。
4.根据权利要求1所述的基于多元数据采集的车型识别系统,其特征在于:所述图像采集设备为高清摄像头,高清摄像头均匀分布在龙门架的四周,以捕捉车辆各个方位的图像,对采集的车辆图像进行裁剪、旋转矫正变形后,利用canny算法,提取车型的轮廓边缘,后对车型的轮廓图像进行特征识别,将车型中车辆的特征点进行识别,并将识别的特征点进行分割;构建基本几何体,将特征点同步到基本几何体上,得到车辆外形的色彩三维模型。
5.根据权利要求1所述的基于多元数据采集的车型识别系统,其特征在于:所述电磁层析成像模块包括均匀排布在龙门架上的六个以上的电磁线圈、通道切换单元、功率放大单元、信号采集单元和嵌入式控制单元,电磁线圈的直径为标准小轿车车身长的三分之一,六个以上的所述电磁线圈中的一个电磁线圈为激励线圈,六个以上的所述电磁线圈中其余的电磁线圈均为检测线圈;
技术总结
本发明涉及智能交通车辆检测技术领域,尤其为一种基于多元数据采集的车型识别系统,包括数据采集端和车型分析平台,车型分析平台包括车型三维模型构建模块、车型分析模块和数据发送模块。本发明,通过三维轮廓扫描设备、图像采集设备和电磁层析成像模块,全面采集车辆的外部轮廓、外观图像和内部结构信息,相较于现有的车型识别技术,数据采集全面,车型分析平台根据采集的数据,构建车型三维模型,并与备案车型数据进行比对,分析车辆的改装情况,生成详细报告,相较于现有的车型识别技术,能够将车辆的改装部分进行检测,数据发送模块将车辆的车牌数据、车主信息和完成检测的车型三维模型进行数据打包后,送到目标系统或用户,数据发送便捷。
技术研发人员:李勇
受保护的技术使用者:福建警察学院
技术研发日:
技术公布日:2024/9/9
- 还没有人留言评论。精彩留言会获得点赞!