用于监测飞行器之间的间隔的系统与方法与流程
本公开涉及飞行器的交通监测与告警领域,尤其是用于监测飞行器之间的间隔的系统与方法。
背景技术:
1、在现代民用飞机中,空中防撞系统(traffic collision avoidance system,tcas)在避免飞机空中相撞和防止危险接近方面发挥重要作用,是民用大型运输类飞机必备的系统。
2、然而,当前的tcas系统仅考虑一般飞行情形,仅涉及单一安全间隔控制模型,难以应对不同情形下的距离冲突,影响飞行安全。
3、本公开针对但不限于上述诸多因素进行了改进。
技术实现思路
1、为此,本公开提出了一种用于监测飞行器之间的间隔的系统与方法。本公开的系统和方法集飞行器实时数据接收、融合处理、双机安全间隔控制模型与安全间隔监测为一体,能够自适应地选择不同的安全间隔控制模型来适应不同的飞行情形。例如,在试飞场景中,本公开的系统与方法可应用于tcas双机近距离冲突飞行试验地面指挥监控,能为地面指挥员和工程技术人员提供实时、直观、准确的双机相互位置状态、告警预测和告警提示,能有效控制的飞机空中碰撞风险的基础上,可以高效率的完成试飞任务,可支持民机机载产品tcas系统的试飞实施。
2、如此,本公开构建了包括双机实时状态数据传输、接收与融合处理,自适应安全间隔控制模型,以及三维可视化监测软件的安全间隔控制系统与方法,实现对tcas系统在各种情形下(诸如冲突试飞、飞行器非正常飞行等等)的安全间隔控制,确保飞行器飞行安全。
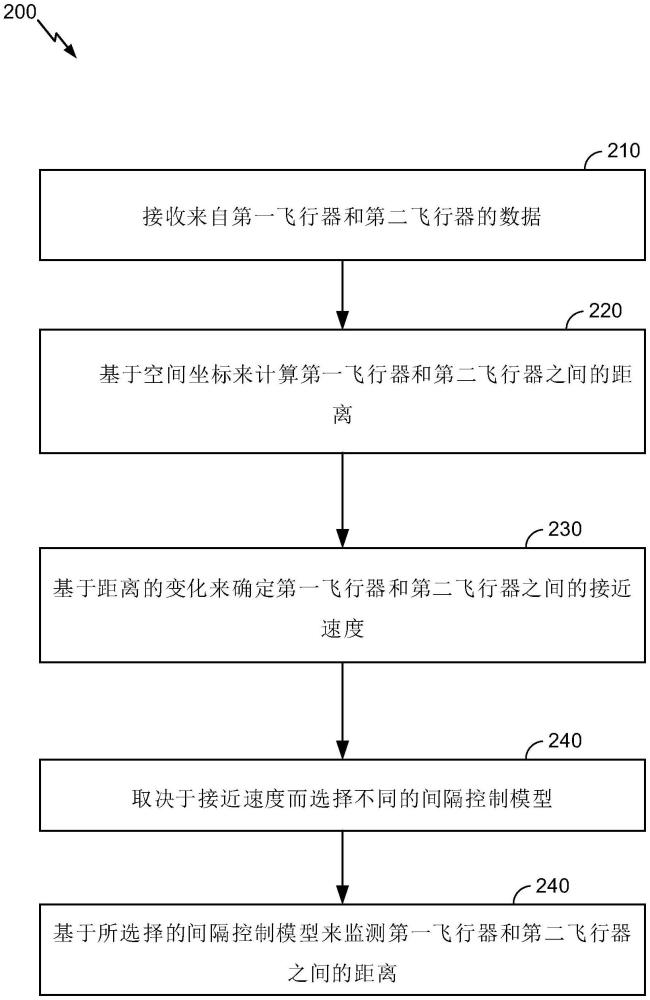
3、根据本公开的第一方面,提供了一种监测飞行器之间的间隔的方法,包括:接收来自第一飞行器和第二飞行器的数据,所述数据包括所述第一飞行器和所述第二飞行器的空间坐标;基于所述空间坐标来计算所述第一飞行器和所述第二飞行器之间的距离;基于所述距离的变化来确定所述第一飞行器和所述第二飞行器之间的接近速度;取决于所述接近速度而选择不同的间隔控制模型;以及基于所选择的间隔控制模型来监测所述第一飞行器和所述第二飞行器之间的距离。
4、根据一实施例,所述空间坐标包括所述飞行器的经纬度坐标和飞行高度坐标。
5、根据另一实施例,所述空间坐标来自全球定位系统,包括gps、北斗定位系统、伽利略定位系统、格洛纳斯定位系统。
6、根据又一实施例,取决于所述接近速度而选择不同的间隔控制模型包括:在接近速度小于预定阈值时,选择圆鼓型间隔控制模型,其中所述圆鼓型间隔控制模型是半径为dmod的球体被z=±vh的平面切割而成的,其中dmod和vh是取决于所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度而异的行业标准值,z是以相关飞行器为原点的垂直轴上的距离;以及在接近速度大于等于所述预定阈值时,选择球型间隔控制模型,其中所述球型间隔控制模型是半径为所述接近速度乘以τ的球体,其中τ是取决于飞行器的飞行高度以及所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度的值。
7、根据又一实施例,τ还取决于飞行器的飞行员的反应时间。
8、根据又一实施例,所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度包括“其它交通”、“临近交通”、“交通咨询”和“决断咨询”四个等级。
9、根据又一实施例,所述方法还包括:在选择所述圆鼓型间隔控制模型的情形中,基于所述第一飞行器和所述第二飞行器之间的水平距离和垂直距离来确定这两个飞行器是否达到与所述威胁程度相关的告警条件:在选择所述球型间隔控制模型的情形中,基于所述第一飞行器和所述第二飞行器之间的距离来确定这两个飞行器是否达到与所述威胁程度相关的告警条件。
10、根据又一实施例,所述方法还包括基于所选择的不同间隔控制模型来示出所述第一飞行器和所述第二飞行器,实现双机实时态势三维显示和/或平面显示。
11、根据又一实施例,所述三维显示实现所述第一飞行器和/或所述第二飞行器的旋转、移动、放大和缩小,所述平面显示中的俯视图示出所述第一飞行器和/或所述第二飞行器的水平位置和航迹,所述平面显示中的侧视图示出所述第一飞行器和所述第二飞行器的相对高度状态和航迹。
12、根据又一实施例,所述三维和/或平面显示还示出所述第一飞行器和所述第二飞行器的高度差值、接近速度、距离以及预计到达交通咨询所需时间和预计到达决断咨询所需时间。
13、根据本公开的第二方面,提供了一种监测飞行器之间的间隔的系统,包括:数据接收模块,所述数据接收模块被配置成接收来自第一飞行器和第二飞行器的数据,所述数据包括所述第一飞行器和所述第二飞行器的空间坐标;计算模块,所述计算模块被配置成基于所述空间坐标来计算所述第一飞行器和所述第二飞行器之间的距离,以及基于所述距离的变化来确定所述第一飞行器和所述第二飞行器之间的接近速度;模型选择模块,所述模型选择模块被配置成取决于所述接近速度而选择不同的间隔控制模型;以及间隔监测模块,所述间隔监测模块被配置成基于所选择的间隔控制模型来监测所述第一飞行器和所述第二飞行器之间的距离。
14、根据一实施例,取决于所述接近速度而选择不同的间隔控制模型包括:在接近速度小于预定阈值时,选择圆鼓型间隔控制模型,其中所述圆鼓型间隔控制模型是半径为dmod的球体被z=±vh的平面切割而成的,其中dmod是取决于所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度而异的行业标准值,vh是行业标准值;以及在接近速度大于等于所述预定阈值时,选择球型间隔控制模型,其中所述球型间隔控制模型是半径为所述接近速度乘以τ的球体,其中τ是取决于飞行器的飞行高度以及所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度的值。
15、根据又一实施例,所述系统还包括显示模块,所述显示模块被配置成基于所选择的不同间隔控制模型来示出所述第一飞行器和所述第二飞行器,实现双机实时态势三维和/或平面显示。
16、根据本公开的第三方面,提供了一种飞行器和/或地面监测站,所述飞行器和/或地面监测站包括处理器和存储器,所述存储器存储处理器可执行指令,所述处理器可执行指令在被所述处理器执行时实现根据本公开的第一方面所述的方法。
17、各方面一般包括如基本上在本文参照附图所描述并且如通过附图所解说的方法、装备、系统、计算机程序产品和处理系统。
18、前述内容已较宽泛地勾勒出根据本公开的示例的特征和技术优势以使下面的详细描述可以被更好地理解。附加的特征和优势将在此后描述。所公开的概念和具体示例可容易地被用作修改或设计用于实施与本公开相同的目的的其他结构的基础。此类等效构造并不背离所附权利要求书的范围。本文所公开的概念的特性在其组织和操作方法两方面以及相关联的优势将因结合附图来考虑以下描述而被更好地理解。每一附图是出于解说和描述目的来提供的,且并不定义对权利要求的限定。
技术特征:
1.一种监测飞行器之间的间隔的方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,所述空间坐标包括所述飞行器的经纬度坐标和飞行高度坐标。
3.根据权利要求2所述的方法,其特征在于,所述空间坐标来自全球定位系统,包括gps、北斗定位系统、伽利略定位系统、格洛纳斯定位系统。
4.根据权利要求1所述的方法,其特征在于,取决于所述接近速度而选择不同的间隔控制模型包括:
5.根据权利要求4所述的方法,其特征在于,τ还取决于飞行器的飞行员的反应时间。
6.根据权利要求4所述的方法,其特征在于,所述第一飞行器和所述第二飞行器中的一者对另一者的威胁程度包括“其它交通”、“临近交通”、“交通咨询”和“决断咨询”四个等级。
7.根据权利要求4所述的方法,其特征在于,还包括:
8.根据权利要求1所述的方法,其特征在于,还包括基于所选择的不同间隔控制模型来示出所述第一飞行器和所述第二飞行器,实现双机实时态势三维显示和/或平面显示。
9.根据权利要求8所述的方法,其特征在于,所述三维显示实现所述第一飞行器和/或所述第二飞行器的旋转、移动、放大和缩小,所述平面显示中的俯视图示出所述第一飞行器和/或所述第二飞行器的水平位置和航迹,所述平面显示中的侧视图示出所述第一飞行器和所述第二飞行器的相对高度状态和航迹。
10.根据权利要求8所述的方法,其特征在于,所述三维和/或平面显示还示出所述第一飞行器和所述第二飞行器的高度差值、接近速度、距离以及预计到达交通咨询所需时间和预计到达决断咨询所需时间。
11.一种监测飞行器之间的间隔的系统,其特征在于,包括:
12.根据权利要求11所述的系统,其特征在于,取决于所述接近速度而选择不同的间隔控制模型包括:
13.根据权利要求12所述的系统,其特征在于,还包括显示模块,所述显示模块被配置成基于所选择的不同间隔控制模型来示出所述第一飞行器和所述第二飞行器,实现双机实时态势三维和/或平面显示。
14.一种飞行器和/或地面监测站,其特征在于,所述飞行器和/或地面监测站包括处理器和存储器,所述存储器存储处理器可执行指令,所述处理器可执行指令在被所述处理器执行时实现根据权利要求1-10中的任一项所述的方法。
技术总结
本公开涉及一种用于监测飞行器之间的间隔的方法和系统。所述方法包括:接收来自第一飞行器和第二飞行器的数据,所述数据包括所述第一飞行器和所述第二飞行器的空间坐标;基于所述空间坐标来计算所述第一飞行器和所述第二飞行器之间的距离;基于所述距离的变化来确定所述第一飞行器和所述第二飞行器之间的接近速度;取决于所述接近速度而选择不同的间隔控制模型;以及基于所选择的间隔控制模型来监测所述第一飞行器和所述第二飞行器之间的距离。
技术研发人员:莫兴智,马明,戴维,米毅,许鑫,温亚军,梁远东,苏翼,王佩
受保护的技术使用者:中国商用飞机有限责任公司
技术研发日:
技术公布日:2024/12/17
- 还没有人留言评论。精彩留言会获得点赞!