作业对象的安全状态的确定方法、装置和处理器与流程
本发明涉及高空作业安全设备,具体而言,涉及一种作业对象的安全状态的确定方法、装置和处理器。
背景技术:
1、目前,在高空作业中,安全带是保障作业人员生命安全的重要设备。它们是作业人员生命安全的最后一道防线。监测和确定安全设备的状态是确保作业人员安全的关键步骤。
2、在相关技术中,由于各种原因,作业人员可能会在作业过程中意外失去安全设备的保护,这给作业人员带来了极大的安全风险。目前,缺乏一种能够及时、准确地判断高空作业人员是否失去安全设备保护的方法。因此,存在无法确定作业对象的安全状态的技术问题。
3、针对上述存在的无法确定作业对象的安全状态的技术问题,目前尚未提出有效的解决方案。
技术实现思路
1、本发明实施例提供了一种作业对象的安全状态的确定方法、装置和处理器,以至少解决无法确定作业对象的安全状态的技术问题。
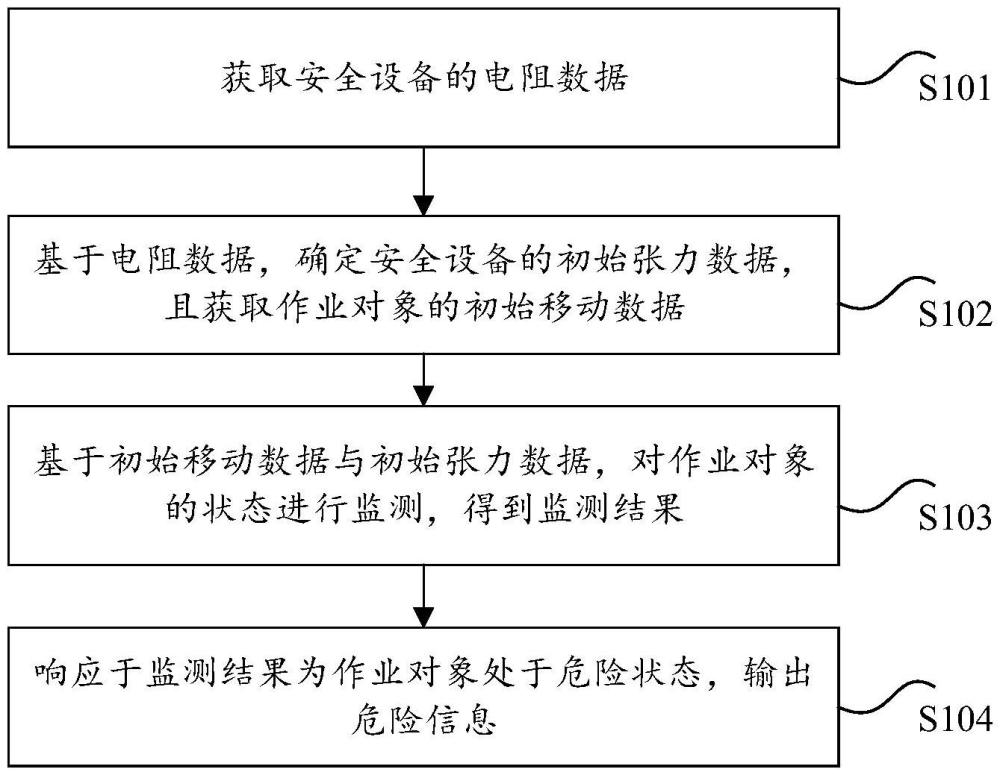
2、根据本发明实施例的一个方面,提供了一种作业对象的安全状态的确定方法。该方法可以包括:获取安全设备的电阻数据,其中,安全设备用于使作业对象处于安全状态;基于电阻数据,确定安全设备的初始张力数据,且获取作业对象的初始移动数据;基于初始移动数据与初始张力数据,对作业对象的状态进行监测,得到监测结果,其中,监测结果用于表示作业对象处于安全状态或者作业对象处于危险状态;响应于监测结果为作业对象处于危险状态,输出危险信息,其中,危险信息用于提示作业对象处于危险状态。
3、可选地,基于初始移动数据与初始张力数据,对作业对象的状态进行监测,得到监测结果,包括:响应于初始张力数据小于第一张力阈值,或初始张力数据大于第二张力阈值,从初始移动数据中提取初始移动值,其中,第一张力阈值小于第二张力阈值;基于初始张力数据与初始移动值,对作业对象的状态进行监测,得到监测结果。
4、可选地,基于初始张力数据与初始移动值,对作业对象的状态进行监测,得到监测结果,包括:响应于初始张力数据小于第一张力阈值,且初始移动值大于第一移动阈值,获取第一监测数据,其中,第一监测数据用于指示对安全设备和作业对象进行监测的时间间隔数据;响应于初始张力数据大于第二张力阈值,且初始移动值等于第二移动阈值,获取第一监测数据,其中,第二移动阈值小于第一移动阈值;响应于初始张力数据小于第一张力阈值,且初始移动值小于第二移动阈值,获取第二监测数据,其中,第二监测数据对应的时间间隔大于第一监测数据对应的时间间隔;响应于初始张力数据大于第二张力阈值,且初始移动值大于第一移动阈值,获取第二监测数据;基于第一监测数据与第二监测数据,对作业对象的状态进行监测,得到监测结果。
5、可选地,基于第一监测数据与第二监测数据,对作业对象的状态进行监测,得到监测结果,包括:按照第一监测数据或第二监测数据,对安全设备和作业对象进行监测,得到目标张力数据和目标移动值;基于目标张力数据和目标移动值,确定作业对象的监测结果。
6、可选地,基于目标张力数据和目标移动值,确定作业对象的监测结果,包括:响应于监测数据为第一监测数据,目标张力数据小于第一张力阈值,且目标移动值大于第一移动阈值,确定作业对象的监测结果为作业对象处于危险状态;响应于监测数据为第一监测数据,目标张力数据大于第二张力阈值,且目标移动值小于第二移动阈值,确定作业对象的监测结果为作业对象处于危险状态。
7、可选地,作业对象的安全状态的确定方法,还包括:响应于监测数据为第二监测数据,目标张力数据小于第一张力阈值,或目标移动值小于第二移动阈值,确定作业对象的监测结果为作业对象处于危险状态;响应于监测数据为第二监测数据,目标张力数据大于第一张力阈值,或目标移动值大于第一移动阈值,确定作业对象的监测结果为作业对象处于危险状态。
8、根据本发明实施例的另一方面,还提供了一种作业对象的安全状态的确定装置。该装置可以包括:第一获取单元,用于获取安全设备的电阻数据,其中,安全设备用于使作业对象处于安全状态;第二获取单元,用于基于电阻数据,确定安全设备的初始张力数据,且获取作业对象的初始移动数据;监测单元,用于基于初始移动数据与初始张力数据,对作业对象的状态进行监测,得到监测结果,其中,监测结果用于表示作业对象处于安全状态或者作业对象处于危险状态;输出单元,用于响应于监测结果为作业对象处于危险状态,输出危险信息,其中,危险信息用于提示作业对象处于危险状态。
9、根据本发明实施例的另一方面,还提供了一种计算机可读存储介质,计算机可读存储介质包括存储的程序,其中,在程序被处理器运行时控制存储介质所在设备执行本发明实施例中的作业对象的安全状态的确定方法。
10、根据本发明实施例的另一方面,还提供了一种处理器。该处理器用于运行程序,其中,程序运行时执行本发明实施例中的作业对象的安全状态的确定方法。
11、根据本发明实施例的另一方面,还提供了一种计算机程序产品。该程序产品包括计算机指令,该计算机指令被处理器执行时实现本发明实施例中的作业对象的安全状态的确定方法。
12、在本发明实施例中,获取安全设备的电阻数据,其中,安全设备用于使作业对象处于安全状态;基于电阻数据,确定安全设备的初始张力数据,且获取作业对象的初始移动数据;基于初始移动数据与初始张力数据,对作业对象的状态进行监测,得到监测结果,其中,监测结果用于表示作业对象处于安全状态或者作业对象处于危险状态;响应于监测结果为作业对象处于危险状态,输出危险信息,其中,危险信息用于提示作业对象处于危险状态。也就是说,本发明通过安全设备的初始张力数据和初始移动数据,对作业对象的状态进行监测,当监测结果为作业对象处于危险状态时,及时输出危险信息,保证了及时判断高空作业人员是否失去安全设备保护的目的,从而解决了无法确定作业对象的安全状态的技术问题,实现了及时确定作业对象的安全状态的技术效果。
技术特征:
1.一种作业对象的安全状态的确定方法,其特征在于,包括:
2.根据权利要求1所述的方法,其特征在于,基于所述初始移动数据与所述初始张力数据,对所述作业对象的状态进行监测,得到监测结果,包括:
3.根据权利要求2所述的方法,其特征在于,基于所述初始张力数据与所述初始移动值,对所述作业对象的状态进行监测,得到所述监测结果,包括:
4.根据权利要求3所述的方法,其特征在于,基于所述第一监测数据与所述第二监测数据,对所述作业对象的状态进行监测,得到所述监测结果,包括:
5.根据权利要求4所述的方法,其特征在于,基于所述目标张力数据和所述目标移动值,确定所述作业对象的所述监测结果,包括:
6.根据权利要求1-5中任意一项所述的方法,其特征在于,所述方法还包括:
7.一种作业对象的安全状态的确定装置,其特征在于,包括:
8.一种计算机可读存储介质,其特征在于,所述计算机可读存储介质包括存储的程序,其中,在所述程序被处理器运行时控制所述存储介质所在设备执行权利要求1至6中任意一项所述的方法。
9.一种处理器,其特征在于,所述处理器用于运行程序,其中,所述程序运行时执行权利要求1至6中任意一项所述的方法。
10.一种计算机程序产品,其特征在于,所述计算机程序产品包括计算机指令,该计算机指令被处理器执行时实现权利要求1至6中任意一项所述的方法。
技术总结
本发明公开了一种作业对象的安全状态的确定方法、装置和处理器。其中,该方法包括:获取安全设备的电阻数据,其中,安全设备用于使作业对象处于安全状态;基于电阻数据,确定安全设备的初始张力数据,且获取作业对象的初始移动数据;基于初始移动数据与初始张力数据,对作业对象的状态进行监测,得到监测结果,其中,监测结果用于表示作业对象处于安全状态或者作业对象处于危险状态;响应于监测结果为作业对象处于危险状态,输出危险信息,其中,危险信息用于提示作业对象处于危险状态。本发明解决了无法确定作业对象的安全状态的技术问题。
技术研发人员:赵志刚,王茂春,尹文波,陈海登,曹维安,许强,李敬,李宇峰,观贵安,田亮,于从生,吴培骋,吴绍兴,谢清泉,罗思源
受保护的技术使用者:广东电网有限责任公司
技术研发日:
技术公布日:2025/2/5
- 还没有人留言评论。精彩留言会获得点赞!