一种基于Tbox的车辆红绿灯数据判定方法及Tbox与流程
本发明涉及一种基于tbox的车辆红绿灯数据判定方法及tbox,属于车辆读取红绿灯数据领域。
背景技术:
1、tbox(telematics box,远程通信终端),是车联网系统中的一个关键组件,作为主要的智能车载终端,它通过4g远程无线通讯、gps卫星定位、加速度传感和can通讯等功能,为整车提供远程通讯接口,实现行车数据采集、行驶轨迹记录等功能。tbox能够获取车辆的数据,并将这些数据上传到tsp(telematicsservice provider,车联网服务整合商)后台,或从后台接收指令并返回对应的执行结果,使车主可以通过智能钥匙或手机app远程监控并控制车辆。
2、若客车能够有效地获取所在车道的红绿灯数据,并将红绿灯数据在车内进行显示,可以有效地使驾驶员或乘客知道道路信息,进而使驾驶员做出合理的操作并使乘客了解到红绿灯信息,提高乘客的出行体验。
3、当前车辆获取红绿灯数据有以下几种方式:
4、1、依托v2x(vehicle to everything,车路协同系统),通过obu(onboard unit,车载单元)与rsu(road side unit,路侧设备)实时获取红绿灯状态以及倒计时信息。但是这样方式需要对车辆增加obu设备、路侧增加rsu设备,而且红绿灯需要具备联网功能,这极大地增加了成本。
5、2、依托摄像头等图像采集设备,对道路环境进行采集,进而获取停止线、红绿灯等目标图像信息。这种方式同样需要对车辆增加相应的采集设备,同样增加了成本,并且对所使用的目标分析算法以及目标分析设备的性能有着较高的要求。
6、3、由具备车联网功能的tbox,通过与云端大数据平台建立通信连接,获取包括红路灯状态以及倒计时信息的红路灯数据。云端大数据平台可以根据一定时间段内的车辆启停等数据,有大数据挖掘处红绿灯周期时长信息,或者通过车管所获取到红绿灯信息。
7、但是基于tbox通过一定的方法获取到的红绿灯数据并对红绿灯数据进行处理时会出现以下几种情况:
8、1.tbox出现网络异常时,会导致请求不到数据,并影响红绿灯信息在车内的持续显示。
9、2.tbox运营环境复杂,定位数据在受到干扰时,容易出现定位漂移(例如,定位到对向车道),进而影响到红绿灯数据。
10、3. tbox没有地图数据,无法控制红绿灯信息在显示设备上的开启和关闭。
11、4.如果tbox请求回来的数据出现跳变、延迟等异常情况,会导致红绿灯数据异常。
12、5. tbox使用的物联网卡是根据不同的流量进行收费的,若一直持续性的请求数据,同样会进一步的增加成本。
技术实现思路
1、本发明的目的是提供一种基于tbox的车辆红绿灯数据判定方法及tbox,用以解决车辆在行驶过程中,tbox出现请求不到红绿灯数据的问题。
2、为实现上述目的,本发明的方案包括:
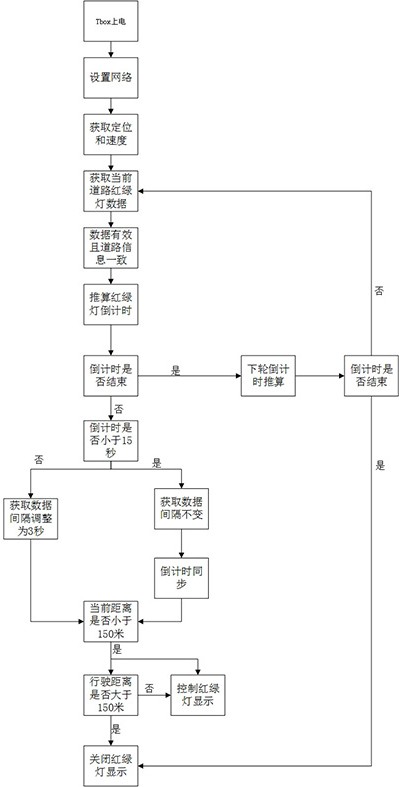
3、本发明的一种基于tbox的车辆红绿灯数据判定方法,包括如下步骤:tbox持续向云平台请求数据,进而得到包括这一轮灯态和倒计时的红绿灯数据;根据得到的红绿灯数据中的倒计时开启倒计时推算,将推算的红绿灯倒计时与实时得到的倒计时作对比,若不同,将推算的红绿灯倒计时修改为实时得到的倒计时;进而将推算的倒计时和对应的灯态进行展示。
4、进一步地,tbox按照第一设定时间间隔向云平台请求数据;当推算的倒计时大于设定时间时,tbox按照第二设定时间间隔实时持续向云平台请求数据,第二设定时间间隔大于第一设定时间间隔;当推算的倒计时小于等于设定时间时,tbox按照第一设定时间间隔实时持续向云平台请求数据。
5、进一步地,选择有效数据中的一个红绿灯数据进行倒计时推算;红绿灯数据满足设定条件为有效数据,设定条件包括:依次得到的设定个数的红绿灯倒计时的时间间隔与第一设定时间间隔都相同且对应的红绿灯的灯态都相同。
6、进一步地,选择有效数据中的最后到达的红绿灯数据进行倒计时推算。
7、进一步地,依次得到的数据还包括位置信息,位置信息包括车辆在当前行驶方向下所在的道路信息;设定条件还包括:多个依次得到的道路信息都相同。
8、进一步地,位置信息还包括车辆与用于管控该车辆当前行驶方向上的车道的红绿灯之间的水平距离,当水平距离小于设定距离时,开启红绿灯数据的展示。
9、进一步地,开启红绿灯数据的展示后,通过实时获取的车辆在行驶过程中的车速,计算车辆的行驶距离,当行驶距离大于设定距离时,关闭红绿灯数据的展示。
10、进一步地,红绿灯数据还包括下一轮红绿灯的灯态和倒计时,当推算的倒计时结束时,将推算的倒计时修改为下一轮红绿灯的倒计时,若在修改后的推算倒计时结束时,没有请求到有效数据,则关闭红绿灯的展示。
11、进一步地,通过整车发动机或gps获取车速。
12、一种tbox,包括处理器,处理器用于执行计算机程序以实现基于tbox的车辆红绿灯数据判定方法的步骤。
13、本发明的有益效果为:本发明是开拓式发明创造,本发明的tbox根据得到的红绿灯数据,开启红绿灯倒计时的推算,将推算的红绿灯倒计时根据实时得到的倒计时进行偏差处理,若tbox无法得到红绿灯数据,则将推算的倒计时和对应的灯态进行展示。本发明在tbox无法请求到红绿灯数据后,依然可以有效地展示红绿灯数据。
技术特征:
1.一种基于tbox的车辆红绿灯数据判定方法,其特征在于,包括如下步骤:tbox持续向云平台请求数据,进而得到包括这一轮灯态和倒计时的红绿灯数据;根据得到的红绿灯数据中的倒计时开启倒计时推算,将推算的红绿灯倒计时根据实时得到的倒计时进行偏差处理,若tbox无法得到红绿灯数据,则将推算的倒计时和对应的灯态进行展示。
2.根据权利要求1所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,tbox按照第一设定时间间隔向云平台请求数据;当推算的倒计时大于设定时间时,tbox按照第二设定时间间隔实时持续向云平台请求数据,所述第二设定时间间隔大于第一设定时间间隔;当推算的倒计时小于等于设定时间时,tbox按照所述第一设定时间间隔实时持续向云平台请求数据。
3.根据权利要求1所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,选择有效数据中的一个所述红绿灯数据进行倒计时推算;红绿灯数据满足设定条件为所述有效数据,所述设定条件包括:依次得到的设定个数的红绿灯倒计时的时间间隔与所述第一设定时间间隔都相同且对应的红绿灯的灯态都相同。
4.根据权利要求3所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,选择有效数据中的最后到达的所述红绿灯数据进行倒计时推算。
5.根据权利要求3所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,依次得到的数据还包括位置信息,所述位置信息包括车辆在当前行驶方向下所在的道路信息;所述设定条件还包括:多个依次得到的道路信息都相同。
6.根据权利要求5所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,所述位置信息还包括车辆与用于管控该车辆当前行驶方向上的车道的红绿灯之间的水平距离,当所述水平距离小于设定距离时,开启红绿灯数据的展示。
7.根据权利要求6所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,开启红绿灯数据的展示后,通过实时获取的车辆在行驶过程中的车速,计算车辆的行驶距离,当所述行驶距离大于设定距离时,关闭红绿灯数据的展示。
8.根据权利要求7所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,所述红绿灯数据还包括下一轮红绿灯的灯态和倒计时,当推算的倒计时结束时,将推算的倒计时修改为所述下一轮红绿灯的倒计时,若在修改后的推算倒计时结束时,没有请求到有效数据,则关闭红绿灯的展示。
9.根据权利要求7所述的基于tbox的车辆红绿灯数据判定方法,其特征在于,通过整车发动机或gps获取所述车速。
10.一种tbox,包括处理器,其特征在于,所述处理器用于执行计算机程序以实现权利要求1~9任一项所述基于tbox的车辆红绿灯数据判定方法的步骤。
技术总结
本发明涉及一种基于Tbox的车辆红绿灯数据判定方法及Tbox,属于车辆读取红绿灯数据领域。本发明的Tbox根据得到的红绿灯数据,开启红绿灯倒计时的推算,将推算的红绿灯倒计时根据实时得到的倒计时进行偏差处理,若Tbox无法得到红绿灯数据,则将推算的倒计时和对应的灯态进行展示。本发明在Tbox无法请求到红绿灯数据后,依然可以有效地展示红绿灯数据。
技术研发人员:姚江涛,梁晨星,王大勇,李威
受保护的技术使用者:宇通客车股份有限公司
技术研发日:
技术公布日:2025/3/10
- 还没有人留言评论。精彩留言会获得点赞!