高速路段与城市路段两种场景下的换道意图识别方法及系统
本发明涉及交通安全,尤其涉及高速路段与城市路段两种场景下的换道意图识别方法及系统。
背景技术:
1、由于司机不当的换道操作引起的交通事故占据交通事故总数的大部分,因此,需要对驾驶员的换道意图进行准确的识别以减少此类事故造成的损失。目前,针对车辆换道意图识别的方法多针对单一的场景或者应用的场景不明确,近年来,随着深度学习的发展,换道意图的识别方法由普通的算法转变为深度学习的方法,以提高识别准确性。
技术实现思路
1、本发明主要目的在于提供一种可以提高识别换道意图准确性的高速路段与城市路段两种场景下的换道意图识别方法及系统。
2、本发明所采用的技术方案是:
3、提供一种车辆换道意图识别方法,包括以下步骤:
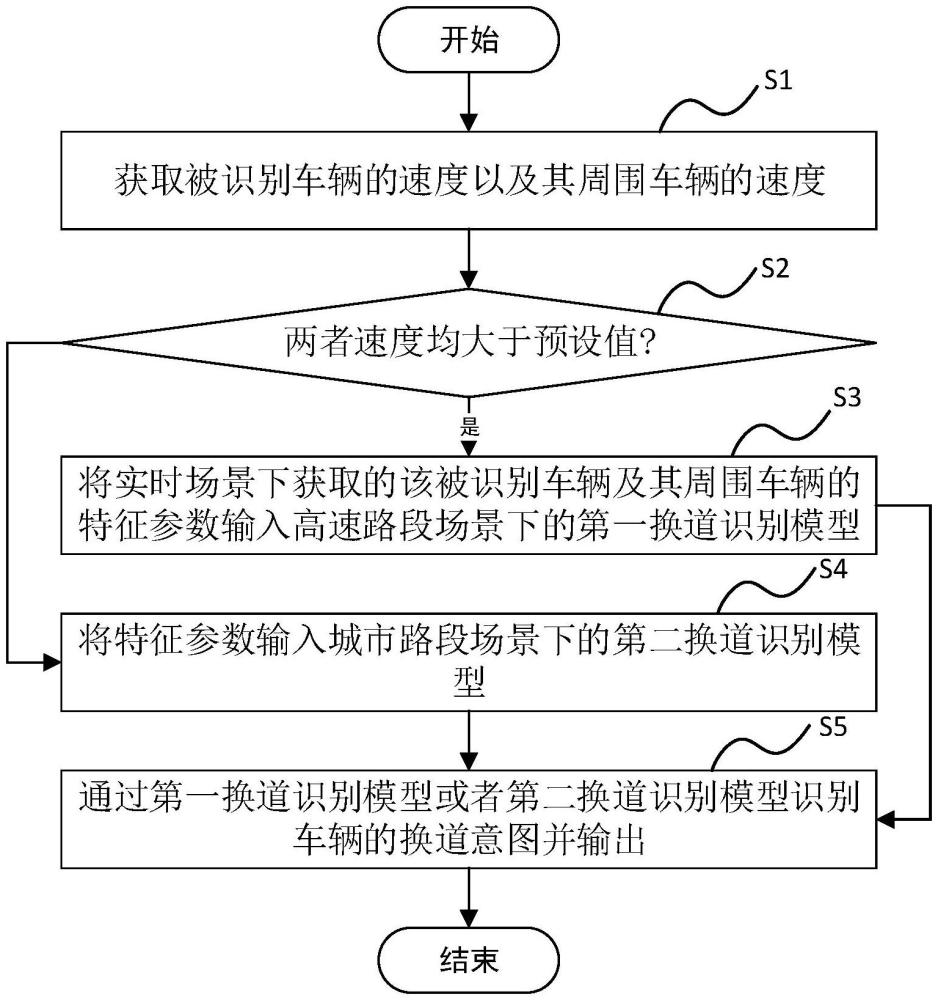
4、获取被识别车辆的速度以及其周围车辆的速度;
5、若两者速度均大于预设值,则将实时场景下获取的该被识别车辆及其周围车辆的特征参数输入高速路段场景下的第一换道识别模型,否则,将特征参数输入城市路段场景下的第二换道识别模型;其中被识别车辆的特征参数包括速度、加速度、横坐标和纵坐标,周围车辆的特征参数包括速度和加速度,以及与被识别车辆的横向相对位置、纵向相对位置;
6、通过第一换道识别模型或者第二换道识别模型识别车辆的换道意图并输出。
7、接上述技术方案,第一换道识别模型的构建包括以下步骤:
8、构建第一换道识别模型,包括gru循环层、注意力机制层、全连接层和输出层;其输入为目标车辆及其周围车辆的特征参数,输出为目标车辆三种不同换道类别的概率;
9、从车辆轨迹公开数据集中选取高速路段的历史车辆轨迹数据集并处理,获得车道编号发生一次变化的车辆,筛选出在左变道后或者右变道后的车道编号下稳定行驶预设时长的车辆,且筛选出车道编号始终不变的直行车辆,将筛选出来的车辆作为样本车辆;获取样本车辆中左变道和右变道车辆id及每一帧的数据,以每一车辆对应车道编号发生变化的帧为起点,获取换道之前的一定帧数的数据,相应获取这段时间内周围车辆的速度、加速度、横坐标和纵坐标,并计算出周围车辆每一帧相对于样本车辆的横向相对位置和纵向相对位置;同时获取直行车辆及其周围车辆的相应数据;将每个样本车辆及其周围车辆的数据作为一个样本,并按照三种不同换道类别打上相应标签,得到样本集;
10、将样本集划分为训练集和测试集,对第一换道识别模型进行训练和测试,得到符合目标要求的最终第一换道识别模型。
11、接上述技术方案,第二换道识别模型的构建与第一换道识别模型相同,仅训练集和测试集的数据替换为相应的城市路段数据。
12、接上述技术方案,周围车辆包括被识别车辆左前、左后、正前、正后、右前、右后六个位置的车辆。
13、接上述技术方案,训练时,样本的标签具体为:左换道、直行、右换道分别是(1,0,0)、(0,1,0)、(0,0,1),每一个样本中包含n个时间步的特征序列,第i个时间步特征序列为[vi,ai,xi,yi,vij,aij,δxij,δyij]t,其中vi为样本车辆的第i个时间步的速度,ai为样本车辆的第i个时间步的加速度,xi为样本车辆的第i个时间步的纵向位置,yi为样本车辆的第i个时间步的横向位置,vij为样本车辆周围第j辆车第i个时间步的速度,aij为样本车辆周围第j辆车第i个时间步的加速度,δxij为样本车辆周围第j辆车第i个时间步的纵向相对位置,δyij为样本车辆周围第j辆车第i个时间步的横向相对位置,i=1,2…150,j=1,2,3,4,5,6,n=150,带有标签的样本随机分批次进入gru循环层处理,每一个时间步经处理后都会输出一个包含当前时间步重要车辆特征的隐藏状态,每一个样本处理完成会输出n个隐藏状态序列。
14、接上述技术方案,每一个样本经gru循环层输出的n个时间步的隐藏状态序列作为注意力机制层的输入,通过注意力机制层赋予每一个样本各时间步的隐藏状态不同的权重,加权得到最终隐藏状态步骤。
15、接上述技术方案,全连接层的输入为样本的最终隐藏状态,通过对该最终隐藏状态进行线性变换,输出每一个样本的左换道、直行、右换道的概率估计。
16、接上述技术方案,输出层通过激活函数对左换道、直行、右换道的概率估计进行计算并归一化,使得三者相加等于1,最终输出三种不同换道类别的概率。
17、本发明还提供一种车辆换道意图识别系统,包括以下步骤:
18、获取模块,用于获取被识别车辆的速度以及其周围车辆的速度;
19、意图识别模块,若两者速度均大于预设值,则将实时场景下获取的该被识别车辆及其周围车辆的特征参数输入高速路段场景下的第一换道识别模型,否则,将特征参数输入城市路段场景下的第二换道识别模型;其中被识别车辆的特征参数包括速度、加速度、横坐标和纵坐标,周围车辆的特征参数包括速度和加速度,以及与被识别车辆的横向相对位置、纵向相对位置;
20、输出模块,用于通过第一换道识别模型或者第二换道识别模型识别车辆的换道意图并输出。
21、本发明还提供一种计算机存储介质,其内存储有可被处理器执行的计算机程序,该计算机程序执行上述技术方案所述的车辆换道意图识别方法。
22、本发明产生的有益效果是:本发明将不同的场景对应不同的变道意图识别模型,根据车辆速度进行高速路段与城市路段不同场景的划分,将在实时场景下获取的该被识别车辆及其周围车辆的特征参数分别输入到相应的模型中,对高速路段与城市路段两个事故多发场景下的车辆换道意图进行识别,以解决现有方法中换道意图识别应用场景单一或场景不明确的问题。
23、进一步地,相较于传统方法,引入gru循环层能有效地提取换道车辆特征参数的时间依赖性,gru层之后引入了时间注意力机制,该机制通过对车辆换道不同时间步特征赋予不同的权重系数,从而主动筛选出关键车辆信息,进而提高模型的识别性能,有助于提高行车安全性。
24、当然,实施本发明的任一产品并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种车辆换道意图识别方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的车辆换道意图识别方法,其特征在于,第一换道识别模型的构建包括以下步骤:
3.根据权利要求2所述的车辆换道意图识别方法,其特征在于,第二换道识别模型的构建与第一换道识别模型相同,仅训练集和测试集的数据替换为相应的城市路段数据。
4.根据权利要求1所述的车辆换道意图识别方法,其特征在于,周围车辆包括被识别车辆左前、左后、正前、正后、右前、右后六个位置的车辆。
5.根据权利要求2所述的车辆换道意图识别方法,其特征在于,训练时,样本的标签具体为:左换道、直行、右换道分别是(1,0,0)、(0,1,0)、(0,0,1),每一个样本中包含n个时间步的特征序列,第i个时间步特征序列为[vi,ai,xi,yi,vij,aij,δxij,δyij]t,其中vi为样本车辆的第i个时间步的速度,ai为样本车辆的第i个时间步的加速度,xi为样本车辆的第i个时间步的纵向位置,yi为样本车辆的第i个时间步的横向位置,vij为样本车辆周围第j辆车第i个时间步的速度,aij为样本车辆周围第j辆车第i个时间步的加速度,δxij为样本车辆周围第j辆车第i个时间步的纵向相对位置,δyij为样本车辆周围第j辆车第i个时间步的横向相对位置,i=1,2…150,j=1,2,3,4,5,6,n=150,带有标签的样本随机分批次进入gru循环层处理,每一个时间步经处理后都会输出一个包含当前时间步重要车辆特征的隐藏状态,每一个样本处理完成会输出n个隐藏状态序列。
6.根据权利要求5所述的车辆换道意图识别方法,其特征在于,每一个样本经gru循环层输出的n个时间步的隐藏状态序列作为注意力机制层的输入,通过注意力机制层赋予每一个样本各时间步的隐藏状态不同的权重,加权得到最终隐藏状态。
7.根据权利要求6所述的车辆换道意图识别方法,其特征在于,全连接层的输入为样本的最终隐藏状态,通过对该最终隐藏状态进行线性变换,输出每一个样本的左换道、直行、右换道的概率估计。
8.根据权利要求7所述的车辆换道意图识别方法,其特征在于,输出层通过激活函数对左换道、直行、右换道的概率估计进行计算并归一化,使得三者相加等于1,最终输出三种不同换道类别的概率。
9.一种车辆换道意图识别系统,其特征在于,包括:
10.一种计算机存储介质,其特征在于,其内存储有可被处理器执行的计算机程序,该计算机程序执行权利要求1-8中任一项所述的车辆换道意图识别方法。
技术总结
本发明公开了一种车辆换道意图识别方法及系统,其中方法包括以下步骤:获取被识别车辆的速度以及其周围车辆的速度;若两者速度均大于预设值,则将实时场景下获取的该被识别车辆及其周围车辆的特征参数输入高速路段场景下的第一换道识别模型,否则,将特征参数输入城市路段场景下的第二换道识别模型;通过第一换道识别模型或者第二换道识别模型识别车辆的换道意图并输出。本发明根据车辆速度构建高速路段与城市路段不同场景下的识别模型,将在实时场景下获取的该被识别车辆及其周围车辆的特征参数分别输入到相应的模型中进行车辆换道意图识别,可解决现有方法中换道意图识别应用场景单一或场景不明确的问题。
技术研发人员:曾娟,吴坤俐
受保护的技术使用者:武汉理工大学
技术研发日:
技术公布日:2025/3/13
- 还没有人留言评论。精彩留言会获得点赞!