一种基于主从无人机机库的通信系统的制作方法
本发明涉及无人机,特别是涉及一种基于主从无人机机库的通信系统。
背景技术:
1、近年来无人机技术得到了快速发展,无人机在各种场景中的应用也越来越多,应用无人机可以完成各种场景中相应的任务。例如,在森林火灾预防场景中,可以应用无人机进行巡查,以检测森林中是否存在起火点等。
2、鉴于上述情况,可以在需要无人机作业的区域中布设无人机机库,并为无人机机库配置无人机,然而现有技术中,与各个无人机机库进行通信需要占用较多的通信资源,在通信资源有限的情况下,可能会导致通信效率较低,进而导致各个无人机机库协同执行作业任务的效率较低。
技术实现思路
1、本发明实施例的目的在于提供一种基于主从无人机机库的通信系统,以提高多个无人机机库协同工作的效率。具体技术方案如下:
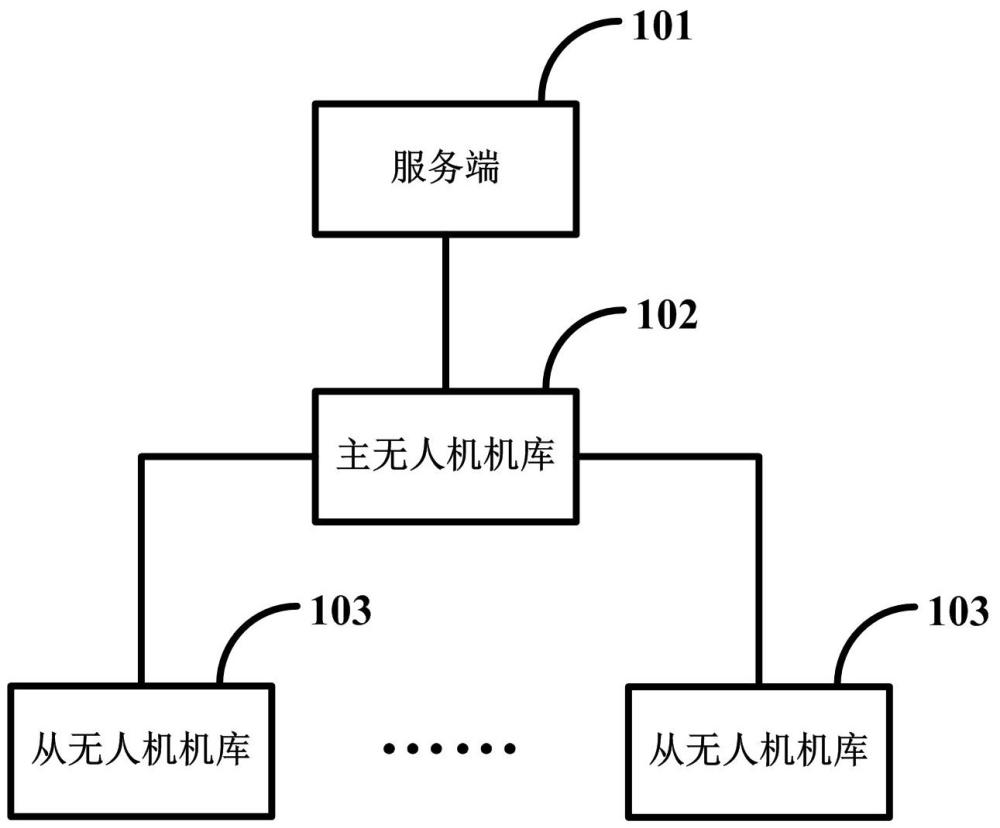
2、根据本发明实施例的一方面,提供了一种基于主从无人机机库的通信系统,所述系统包括:服务端、主无人机机库和一个或多个从无人机机库;
3、所述服务端,用于向所述主无人机机库发送第一消息指令,其中,所述第一消息指令携带目标无人机机库的标识信息,所述目标无人机机库包括:所述主无人机机库和/或从无人机机库;
4、所述主无人机机库,用于响应于接收到所述第一消息指令,对所述第一消息指令进行解析,依据解析结果确定第二消息指令以及目标无人机机库;
5、所述目标无人机机库,用于响应于接收到所述第二消息指令,执行所述第二消息指令指示的任务,获得执行所述第二消息指令指示的任务对应的任务执行状态,向所述主无人机机库发送获得的任务执行状态,所述主无人机机库将所述目标无人机机库的任务执行状态发送至所述服务端。
6、本发明的一个实施例中,在所述第一消息指令指示的任务包括目标任务、所述第一消息指令携带目标任务的任务航线、所述目标无人机机库为所述主无人机机库的情况下;
7、所述主无人机机库,具体用于向主无人机发送目标任务的任务航线,接收所述主无人机在按照所述任务航线执行所述目标任务过程中反馈的任务执行状态和飞行状态,向所述从无人机机库发送所述主无人机反馈的任务执行状态和飞行状态,其中,所述主无人机为:所述主无人机机库配置的无人机;
8、所述主无人机机库,还用于确定第一从无人机机库,并向所述第一从无人机机库发送第三消息指令,其中,所述第三消息指令为控制从无人机执行所述目标任务的指令,所述从无人机为:所述从无人机机库配置的无人机;
9、所述第一从无人机机库,还用于基于所述主无人机机库传输的任务执行状态、飞行状态以及所述第三消息指令,控制所述从无人机辅助所述主无人机完成所述目标任务,获得所述从无人机执行所述目标任务的任务执行状态,并将所获得的任务执行状态发送至所述主无人机机库。
10、本发明的一个实施例中,所述主无人机机库,具体用于确定所述主无人机发生异常时的异常位置;计算所述异常位置与每个从无人机机库的位置之间的第一距离值;从多个第一距离值中选取小于预设第一距离阈值的第一距离值对应的从无人机为第一从无人机,其中,所述第三消息指令为控制从无人机从所述异常位置为起点执行所述主无人机未完成的目标任务的指令。
11、本发明的一个实施例中,在所述第一消息指令指示的任务包括目标任务、所述第一消息指令携带目标任务的任务航线、所述目标无人机机库为所述主无人机机库的情况下;
12、所述主无人机机库,具体用于向主无人机发送目标任务的任务航线,接收所述主无人机在按照所述任务航线执行所述目标任务过程中反馈的任务执行状态和飞行状态,向所述从无人机机库发送所述主无人机反馈的任务执行状态和飞行状态,其中,所述主无人机为:所述主无人机机库配置的无人机;
13、所述从无人机机库,还用于若所述主无人机机库发送的任务执行状态不满足第一预设条件或者飞行状态不满足第二预设条件,则确定所述主无人机存在异常,基于所述主无人机机库传输的任务执行状态,控制所述从无人机执行所述主无人机未完成的所述目标任务。
14、本发明的一个实施例中,第一无人机机库,还用于若所述第一无人机机库满足停靠条件,则广播自身的位置信息,以使得处于飞行状态的无人机基于接收到的位置信息选择可停靠的无人机机库进行停靠,其中,第一无人机机库包括:所述主无人机机库和/或所述从无人机机库。
15、本发明的一个实施例中,所述系统还包括:目标无人机,用于在处于飞行状态、且自身的电量低于预设电量阈值时,根据接收到的所述第一无人机机库广播的位置信息和自身的位置信息,确定进行停靠的无人机机库,并飞往所确定的无人机机库进行停靠,其中,所述目标无人机包括:所述主无人机和/或所述从无人机。
16、本发明的一个实施例中,所述目标无人机,具体用于根据接收到的所述第一无人机机库广播的位置信息和自身的位置信息,确定所述目标无人机自身位置与每个第一无人机机库的位置之间的第二距离值,从多个第二距离值中选取小于预设第二距离阈值的第二距离值对应的第一无人机机库为进行停靠的无人机机库。
17、本发明的一个实施例中,所述系统还包括:所述主无人机和所述从无人机;
18、所述主无人机,用于向所述服务端发送执行所述目标任务过程中获得的任务执行状态和飞行状态;
19、所述服务端,用于针对所述目标任务存储所述主无人机发送的任务执行状态和飞行状态;
20、所述从无人机,用于基于所述第三消息指令,从所述服务端获得所述目标任务的任务航线和所述主无人机发送的最新任务执行状态,基于所获得的任务执行状态和所述任务航线辅助所述主无人机完成所述目标任务。
21、本发明的一个实施例中,所述主无人机机库,具体用于获得解析得到的所述第一消息指令中携带的目标无人机机库的标识信息;根据存储的标识信息与从无人机机库的对应关系,确定与目标无人机机库的标识信息对应的从无人机机库,作为目标无人机机库。
22、本发明的一个实施例中,所述从无人机机库为多个时,所述主无人机机库从多个从无人机机库中选取与目标无人机机库的标识信息匹配的从无人机机库,将所述第二消息指令发送至选取后的从无人机机库。
23、本发明实施例有益效果:
24、由以上可见,应用本发明实施例提供的基于主从无人机机库的通信系统,服务端可以向主无人机机库发送消息指令,通过主无人机机库来控制从无人机机库。这样可以减少距离较远的服务端与从无人机机库的直接通信的情况,服务端通过与从无人机机库距离较近的主无人机机库来间接控制从无人机机库,可以减少由于距离过远、信号较差导致的通信失败的情况,提升通信成功率,减少失败的通信占用通信资源的情况,减少通信资源浪费,提高服务端、主无人机机库和从无人机机库的通信效率,进而可以提高多个无人机机库协同工作的效率。
25、当然,实施本发明的任一产品或方法并不一定需要同时达到以上所述的所有优点。
技术特征:
1.一种基于主从无人机机库的通信系统,其特征在于,所述系统包括:服务端、主无人机机库和一个或多个从无人机机库;
2.根据权利要求1所述的系统,其特征在于,在所述第一消息指令指示的任务包括目标任务、所述第一消息指令携带目标任务的任务航线、所述目标无人机机库为所述主无人机机库的情况下;
3.根据权利要求2所述的系统,其特征在于,所述主无人机机库,具体用于确定所述主无人机发生异常时的异常位置;计算所述异常位置与每个从无人机机库的位置之间的第一距离值;从多个第一距离值中选取小于预设第一距离阈值的第一距离值对应的从无人机机库为第一从无人机机库,其中,所述第三消息指令为控制从无人机从所述异常位置为起点执行所述主无人机未完成的目标任务的指令。
4.根据权利要求1所述的系统,其特征在于,在所述第一消息指令指示的任务包括目标任务、所述第一消息指令携带目标任务的任务航线、所述目标无人机机库为所述主无人机机库的情况下;
5.根据权利要求1所述的系统,其特征在于,第一无人机机库,还用于若所述第一无人机机库满足停靠条件,则广播自身的位置信息,以使得处于飞行状态的无人机基于接收到的位置信息选择可停靠的无人机机库进行停靠,其中,第一无人机机库包括:所述主无人机机库和/或所述从无人机机库。
6.根据权利要求5所述的系统,其特征在于,所述系统还包括:目标无人机,用于在处于飞行状态、且自身的电量低于预设电量阈值时,根据接收到的所述第一无人机机库广播的位置信息和自身的位置信息,确定进行停靠的无人机机库,并飞往所确定的无人机机库进行停靠,其中,所述目标无人机包括:所述主无人机和/或所述从无人机。
7.根据权利要求6所述的系统,其特征在于,所述目标无人机,具体用于根据接收到的所述第一无人机机库广播的位置信息和自身的位置信息,确定所述目标无人机自身位置与每个第一无人机机库的位置之间的第二距离值,从多个第二距离值中选取小于预设第二距离阈值的第二距离值对应的第一无人机机库为进行停靠的无人机机库。
8.根据权利要求2或3所述的系统,其特征在于,所述系统还包括:所述主无人机和所述从无人机;
9.根据权利要求1-7中任一项所述的系统,其特征在于,所述主无人机机库,具体用于获得解析得到的所述第一消息指令中携带的目标无人机机库的标识信息;根据存储的标识信息与从无人机机库的对应关系,确定与目标无人机机库的标识信息对应的从无人机机库,作为目标无人机机库。
10.根据权利要求1-7中任一项所述的系统,其特征在于,所述从无人机机库为多个时,所述主无人机机库从多个从无人机机库中选取与目标无人机机库的标识信息匹配的从无人机机库,将所述第二消息指令发送至选取后的从无人机机库。
技术总结
本发明实施例提供了一种基于主从无人机机库的通信系统,涉及无人机技术领域,具体方案如下:基于主从无人机机库的通信系统包括:服务端、主无人机机库和一个或多个从无人机机库;服务端,用于向主无人机机库发送携带目标无人机机库的标识信息的第一消息指令,目标无人机机库包括:主无人机机库和/或从无人机机库;主无人机机库,用于响应于对接收到的第一消息指令进行解析,依据解析结果确定第二消息指令以及目标无人机机库;目标无人机机库,用于响应于接收到第二消息指令,执行第二消息指令指示的任务,获得任务执行状态,向主无人机机库发送获得的任务执行状态。应用本发明实施例提供的方案可以提高多个无人机机库协同工作的效率。
技术研发人员:陈方平,赵硕康,高明,倪学斌,覃光勇
受保护的技术使用者:天津云圣智能科技有限责任公司
技术研发日:
技术公布日:2025/2/20
- 还没有人留言评论。精彩留言会获得点赞!