一种光束指向稳定系统
1.本发明涉及一种光束指向稳定系统。
背景技术:
2.随着激光辅助加工及微纳制造技术的飞速发展,以军工、航空航天行业为代表的先进制造技术不断向小型化、高精度化方向发展,对激光系统各项指标、微纳零件制备平台等方面的整体精度指标提出了更高的要求。为完成高精度装备功能微纳结构制造难题及其所需配套设备的研制,需要提高对装备的精度的要求。
3.光束稳定技术广泛应用于空间光通信,光刻机等高端领域。在空间光通信中,发射端光束指向偏移过大则会导致双方通信的失败;在光刻机应用中,照明光束的指向和位置稳定性很大程度制约着光刻质量,影响光刻产品的良品率,因此有必要引入光束稳定技术,将光束的指向和位置偏移维持在可控范围之内。
4.在现有的光束稳定技术中,多采用光束位置探测光学系统和由两只电动反射镜组成的光束位置调整系统构成光束稳定装置,根据光束位置探测光学系统的输出并通过控制两只可在两个正交方向旋转的电动反射镜将光束位置和指向矫正到指定的容限误差内。这种方式可能存在较大的偏差,影响整套系统的稳定精度。
技术实现要素:
5.为解决上述技术问题,本发明提供了一种光束指向稳定系统,以达到对激光光束的指向进行快速、精确控制的目的。
6.为达到上述目的,本发明的技术方案如下:
7.一种光束指向稳定系统,该系统用于对飞秒激光器的激光波前进行幅度调制,其包括波前快速调节镜、位置敏感元件、信号处理系统和激光分束器,所述波前快速调节镜构成光束指向稳定系统的核心空间的第一空间,所述第一空间中的光强为总光强,光子在所述第一空间中分布为高斯分布,所述波前快速调节镜对波数不敏感,且波前快速调节镜由信号处理系统控制,所述信号处理系统向波前快速调节镜发送相位控制信号,该信号引导波前快速调节镜对激光束进行幅度调制;所述波前快速调节镜包括两个,分别设置于光源出射光束的两侧,且相对设置。
8.上述方案中,所述光束指向稳定系统工作波长为1030nm。
9.上述方案中,所述波前快速调节镜具有三维凹曲面结构,所述三维凹曲面由以下公式描述:
[0010][0011]
或者由以下公式描述:
[0012][0013]
或者以下公式描述:
[0014][0015]
其中,x为三维凹曲面在坐标轴横轴的分布,y为三维凹曲面在坐标轴纵轴的分布,z为三维凹曲面在坐标轴z轴的分布,a、b为分布系数。
[0016]
上述方案中,所述激光分束器位于位置敏感元件和波前快速调节镜之间,所述波前快速调节镜靠近光源设置。
[0017]
上述方案中,所述相位控制信号幅度计算公式为:
[0018][0019]
其中,θ
n
为第n时刻相位控制信号幅度,θ
n-1
为第n-1时刻相位控制信号幅度,α
n-1
为第n-1时刻波前快速调节镜轴向夹角,x1、x2、x3为比例系数,μ和ν为误差。
[0020]
通过上述技术方案,本发明提供的光束指向稳定系统通过位置敏感元件检测光斑位置信息,并将位置信息传输给信号处理系统,信号处理系统向波前快速调节镜发送相位控制信号,该信号引导波前快速调节镜对激光束进行幅度调制,调制后的激光束经激光分束器后分束输出。本发明的光束指向稳定系统组成简单,可以在现有器件装置的基础上,实现光束的调整,达到对激光光束指向稳定性的要求。
附图说明
[0021]
为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍。
[0022]
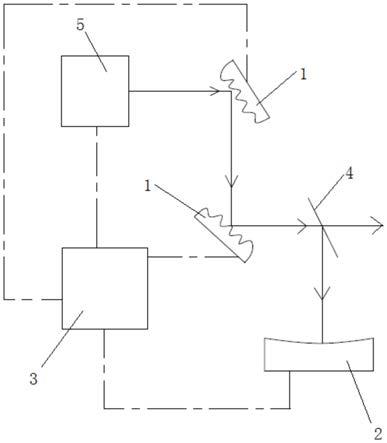
图1为本发明实施例所公开的一种光束指向稳定系统组成示意图。
[0023]
图中,1、波前快速调节镜;2、位置敏感元件;3、信号处理系统;4、激光分束器;5、光源。
具体实施方式
[0024]
下面将结合本发明实施例中的附图,对本发明实施例中的技术方案进行清楚、完整地描述。
[0025]
本发明提供了一种光束指向稳定系统,如图1所示,该系统用于对飞秒激光器的激光波前进行幅度调制,其包括波前快速调节镜1、位置敏感元件2、信号处理系统3和激光分束器4,波前快速调节镜1构成光束指向稳定系统的核心空间的第一空间,第一空间中的光强为总光强,光子在第一空间中分布为高斯分布,波前快速调节镜1对波数不敏感,且波前快速调节镜1由信号处理系统3控制,信号处理系统3向波前快速调节镜1发送相位控制信号,该信号引导波前快速调节镜1对激光束进行幅度调制。波前快速调节镜1包括两个,分别设置于光源出射光束的两侧,且相对设置。
[0026]
本实施例中,光束指向稳定系统工作波长为1030nm。
[0027]
波前快速调节镜1具有三维凹曲面结构,三维凹曲面由以下公式描述:
[0028][0029]
或者由以下公式描述:
[0030][0031]
或者以下公式描述:
[0032][0033]
其中,x为三维凹曲面在坐标轴横轴的分布,y为三维凹曲面在坐标轴纵轴的分布,z为三维凹曲面在坐标轴z轴的分布,a、b为分布系数。
[0034]
激光分束器4位于位置敏感元件2和波前快速调节镜1之间,波前快速调节镜1靠近光源5设置。
[0035]
相位控制信号幅度计算公式为:
[0036][0037]
其中,θ
n
为第n时刻相位控制信号幅度,θ
n-1
为第n-1时刻相位控制信号幅度,α
n-1
为第n-1时刻波前快速调节镜1轴向夹角,x1、x2、x3为比例系数,μ和v为误差。
[0038]
对所公开的实施例的上述说明,使本领域专业技术人员能够实现或使用本发明。对这些实施例的多种修改对本领域的专业技术人员来说将是显而易见的,本文中所定义的一般原理可以在不脱离本发明的精神或范围的情况下,在其它实施例中实现。因此,本发明将不会被限制于本文所示的这些实施例,而是要符合与本文所公开的原理和新颖特点相一致的最宽的范围。
技术特征:
1.一种光束指向稳定系统,该系统用于对飞秒激光器的激光波前进行幅度调制,其包括波前快速调节镜、位置敏感元件、信号处理系统和激光分束器,其特征在于,所述波前快速调节镜构成光束指向稳定系统的核心空间的第一空间,所述第一空间中的光强为总光强,光子在所述第一空间中分布为高斯分布,所述波前快速调节镜对波数不敏感,且波前快速调节镜由信号处理系统控制,所述信号处理系统向波前快速调节镜发送相位控制信号,该信号引导波前快速调节镜对激光束进行幅度调制;所述波前快速调节镜包括两个,分别设置于光源出射光束的两侧,且相对设置。2.根据权利要求1所述的光束指向稳定系统,其特征在于,所述光束指向稳定系统工作波长为1030nm。3.根据权利要求1所述的光束指向稳定系统,其特征在于,所述波前快速调节镜具有三维凹曲面结构,所述三维凹曲面由以下公式描述:或者由以下公式描述:或者以下公式描述:其中,x为三维凹曲面在坐标轴横轴的分布,y为三维凹曲面在坐标轴纵轴的分布,z为三维凹曲面在坐标轴z轴的分布,a、b为分布系数。4.根据权利要求1所述的光束指向稳定系统,其特征在于,所述激光分束器位于位置敏感元件和波前快速调节镜之间,所述波前快速调节镜靠近光源设置。5.根据权利要求1所述的光束指向稳定系统,其特征在于,所述相位控制信号幅度计算公式为:其中,θ
n
为第n时刻相位控制信号幅度,θ
n-1
为第n-1时刻相位控制信号幅度,α
n-1
为第n-1时刻波前快速调节镜轴向夹角,x1、x2、x3为比例系数,μ和v为误差。
技术总结
本发明公开了一种光束指向稳定系统,该系统用于对飞秒激光器的激光波前进行幅度调制,其包括波前快速调节镜、位置敏感元件、信号处理系统和激光分束器,所述波前快速调节镜构成光束指向稳定系统的核心空间的第一空间,所述第一空间中的光强为总光强,光子在所述第一空间中分布为高斯分布,所述波前快速调节镜对波数不敏感,且波前快速调节镜由信号处理系统控制,所述信号处理系统向波前快速调节镜发送相位控制信号,该信号引导波前快速调节镜对激光束进行幅度调制,波前快速调节镜包括两个,分别设置于光源出射光束的两侧,且相对设置。本发明所公开的光束指向稳定系统能够对激光光束的指向进行精确控制,降低成本。降低成本。降低成本。
技术研发人员:李国强 李涛
受保护的技术使用者:山东大学
技术研发日:2020.05.27
技术公布日:2021/12/2
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1