一种兼容多种模式的水下机器人天线模组的制作方法
本技术涉及水下拖曳系统,具体为一种兼容多种模式的水下机器人天线模组。
背景技术:
1、随着海洋科技、海洋经济的深入发展,对海洋的认知和开发已遍布海洋的各个区域,对海洋探测设备的需求越来越迫切。海洋探测设备中,水下机器人的发展尤为迅速。
2、水下机器人在作业过程中通常通过gps卫星实现定位,通过铱星通信实现与岸基控制平台的信息交互。需要进行通信时,水下机器人浮出水面,通过其携带的无线数传天线与岸基控制平台建立通信连接。水下机器人可能还携带有wifi设备、4g设备和定位导航设备(如北斗设备和gps设备)等,以上设备统称为通信设备。因此水下机器人通信情况的优劣直接影响载体的安全及可靠性,而且具有优秀水动力外形的组合天线可以有效提高水下机器人的航行效率,因此研究低阻高效的水下机器人天线模组,对提高水下机器人整体性能具有重要作用。
3、为了保证通信设备的通信状态良好,首先需要将天线安装在水下机器人的高处,使其能稳定地浮出水面。同时,天线还应该安装在具有良好电磁波透射性能的密封壳体内。因此,良好的电磁波透射性能、耐压性能和密封性能都是天线模组应重点保证的重要性能。
4、目前天线组合件普遍采用玻璃纤维增强塑料、陶瓷、玻璃-陶瓷层压板材料或聚氨酯材料制造,采用玻璃纤维增强塑料、陶瓷或玻璃-陶瓷层压板材料将天线密封罩制作圆柱壳形状,使其具有一定的耐压能力,其内部安装通信设备的天线。采用该方式制造简单、由于壁厚均匀电磁波透射性能较好,但由于其外形为圆柱体,当水下机器人航行时尤其是较高速度航行时,容易发生卡门涡街振动,造成天线密封罩损坏。同时,由于天线密封罩一般为垂直于水下机器人航行方向布置,该结构形式的天线密封罩容易拖挂水中的异物造成损坏;采用玻璃纤维增强塑料和陶瓷等材料制作成流线型壳体的形式。采用该方式既解决了圆柱壳形流体动力性能不好的问题,还克服了聚氨酯材料制造成流线型密封罩的因壁厚突变造成电磁波透射损失的问题,是一种比较理想的天线密封罩解决方案。然而,该方式具有承载能力不均匀的问题,提高其耐压能力需要将整体壁厚增加,造成了重量增加严重,从而导致水下机器人重浮心配置不合理的问题。
技术实现思路
1、本实用新型的目的在于提供一种兼容多种模式的水下机器人天线模组,结构简单、工作可靠、阻力小,能够兼容多种模式。
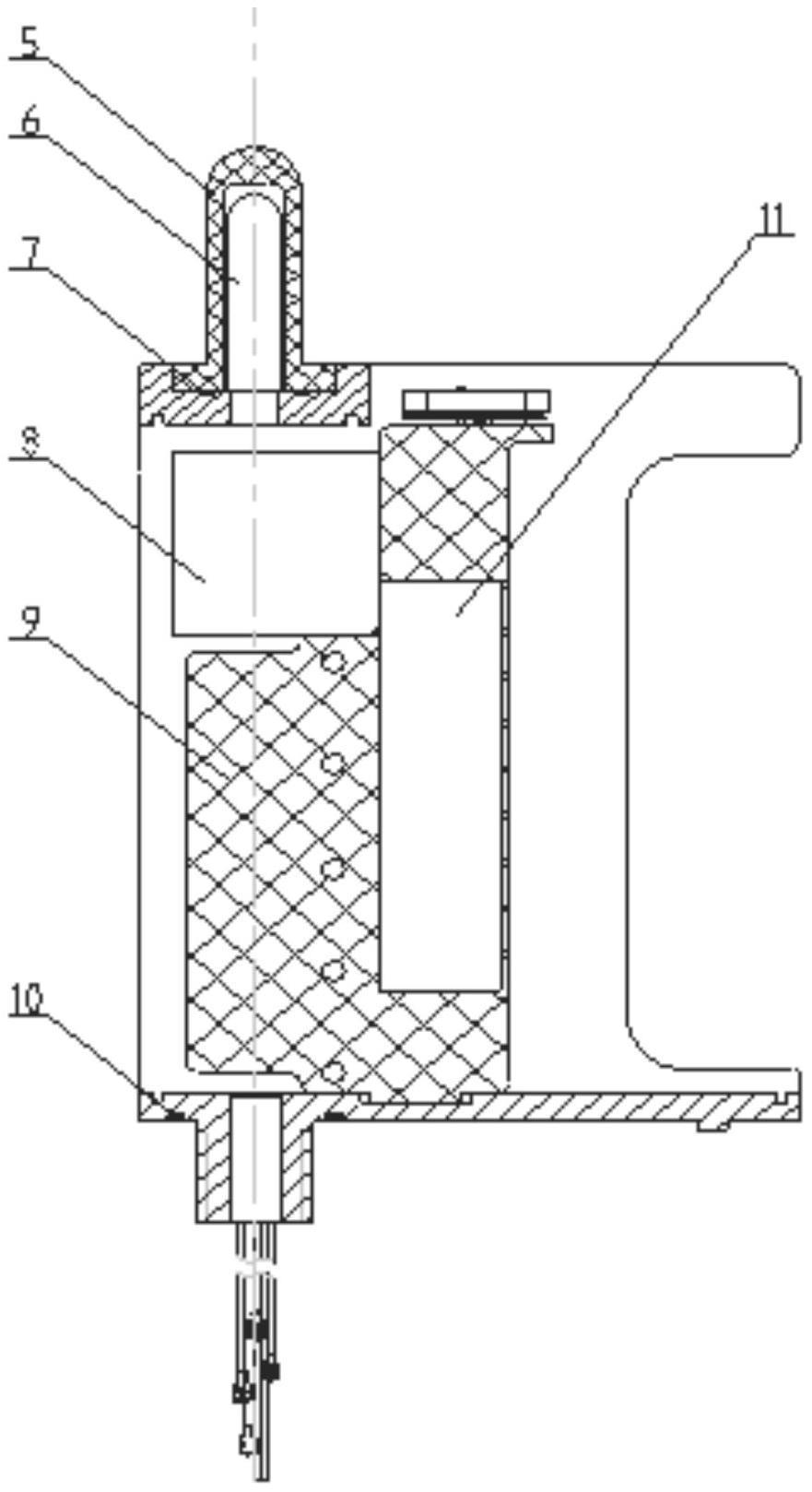
2、为实现上述目的,本实用新型提供如下技术方案:一种兼容多种模式的水下机器人天线模组,其特征在于:包括频闪灯安装座、天线模组安装座、非金属支撑杆以及聚氨酯硫化实体,所述频闪灯安装座上设有与所述频闪灯连接的穿缆孔,所述天线模组安装座固定在水下机器人密封耐压舱体上,所述非金属支撑杆固定在所述天线模组安装座上且其顶部与所述频闪灯安装座相连,所述非金属支撑杆上分布有wifi天线、定位导航天线与4g天线,所述wifi天线、所述定位导航天线与所述4g天线的馈线线缆穿过所述天线模组安装座上的穿缆孔与所述水下机器人密封耐压舱体内的控制系统相连,所述频闪灯安装座、天线模组安装座、非金属支撑杆、wifi天线、定位导航天线与4g天线均设置于所述聚氨酯硫化实体内。
3、进一步的,所述聚氨酯硫化实体呈上下宽中间窄、总体柱状结构,其上下部位为半圆半椭圆相结合形状,其中间部位为naca翼型形状。
4、进一步的,所述天线模组安装座与所述水下机器人密封耐压舱体之间的结合面采用轴向、橡胶密封圈进行密封。
5、进一步的,所述频闪灯安装座上安装有频闪灯和频闪灯罩,所述频闪灯安装座与所述频闪灯罩之间采用轴向、橡胶密封圈密封。
6、进一步的,所述频闪灯罩通过螺钉固定,所述天线模组安装座由内部螺母锁紧。
7、进一步的,所述天线模组安装座设有灌胶槽,其用于注入硬质聚氨酯硫至模具内形成所述聚氨酯硫化实体。
8、有益效果:
9、本实用新型将通信天线用聚氨酯材料硫化在模具内,由非金属材料作为骨架支撑,上下频闪灯安装座、天线模组安装座均采用金属材质,非金属支撑杆固定在天线模组安装座的安装槽内;上端频闪灯安装座预留穿缆孔连接频闪灯,下端天线模组安装座预留穿缆孔连接舱体内的控制系统;频闪灯安装座、天线模组安装座与其结合面采用轴向密封方式,通过橡胶密封圈密封;频闪灯罩通过螺钉固定,天线模组由舱体内螺母锁紧。为了聚氨酯与金属安装座充分接触,提高两者粘接牢固性,天线模组安装座结合面设计有灌胶槽。为了提升硫化效果,支撑杆选用与聚氨酯粘接效果佳的非金属材料。为了在航行中的稳定性,在水下机器人密封耐压舱体结合面设计有限位孔限位。
10、本实用新型采用硬质聚氨酯材料硫化成流线型天线模组的形式,将通信设备的天线硫化在聚氨酯材料内部,其外形可以根据需要制作成理想的形状:迎流面制作成后掠形,拖挂异物时容易使其自动滑脱;去流面制作成椭圆柱形避免了流场混乱,从而可以有效抑制航行时的振动,或可采用naca翼型形状降阻。低阻外形可以减小水下机器人的航行阻力,实现航行效率的提升。
11、本实用新型结构简单、工作可靠、阻力小,能够兼容多种模式的天线模组,满足水下机器人在水面通信时可靠性,同时有效降低了天线的阻力。
技术特征:
1.一种兼容多种模式的水下机器人天线模组,其特征在于:包括频闪灯安装座、天线模组安装座、非金属支撑杆以及聚氨酯硫化实体,所述频闪灯安装座上设有与所述频闪灯连接的穿缆孔,所述天线模组安装座固定在水下机器人密封耐压舱体上,所述非金属支撑杆固定在所述天线模组安装座上且其顶部与所述频闪灯安装座相连,所述非金属支撑杆上分布有wifi天线、定位导航天线与4g天线,所述wifi天线、所述定位导航天线与所述4g天线的馈线线缆穿过所述天线模组安装座上的穿缆孔与所述水下机器人密封耐压舱体内的控制系统相连,所述频闪灯安装座、天线模组安装座、非金属支撑杆、wifi天线、定位导航天线与4g天线均设置于所述聚氨酯硫化实体内。
2.根据权利要求1所述的兼容多种模式的水下机器人天线模组,其特征在于:所述聚氨酯硫化实体呈上下宽中间窄、总体柱状结构,其上下部位为半圆半椭圆相结合形状,其中间部位为naca翼型形状。
3.根据权利要求1所述的兼容多种模式的水下机器人天线模组,其特征在于:所述天线模组安装座与所述水下机器人密封耐压舱体之间的结合面采用轴向、橡胶密封圈进行密封。
4.根据权利要求1所述的兼容多种模式的水下机器人天线模组,其特征在于:所述频闪灯安装座上安装有频闪灯和频闪灯罩,所述频闪灯安装座与所述频闪灯罩之间采用轴向、橡胶密封圈密封。
5.根据权利要求4所述的兼容多种模式的水下机器人天线模组,其特征在于:所述频闪灯罩通过螺钉固定,所述天线模组安装座由内部螺母锁紧。
6.根据权利要求1所述的兼容多种模式的水下机器人天线模组,其特征在于:所述天线模组安装座设有灌胶槽,其用于注入硬质聚氨酯硫至模具内形成所述聚氨酯硫化实体。
技术总结
本技术公开了一种兼容多种模式的水下机器人天线模组,包括频闪灯安装座、天线模组安装座、非金属支撑杆以及聚氨酯硫化实体,频闪灯安装座上设有穿缆孔连接频闪灯,天线模组安装座固定在水下机器人密封耐压舱体上,非金属支撑杆固定在天线模组安装座上且顶部与频闪灯安装座相连,非金属支撑杆上分布有wifi天线、定位导航天线、天线的馈线线缆穿过天线模组安装座上的穿缆孔与水下机器人密封耐压舱体内的控制系统相连,聚氨酯硫化实体通过模具形成将频闪灯安装座、天线模组安装座、非金属支撑杆、wifi天线、定位导航天线、4G天线包裹在内。本技术提供一种结构简单、工作可靠、阻力小,兼容多种模式的水下机器人天线模组。
技术研发人员:伍红权,吴文轩,王玉全,任嘉兴
受保护的技术使用者:中科探海(苏州)海洋科技有限责任公司
技术研发日:20211129
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!