搬送装置、搬送方法及程序与流程
本发明涉及一种搬送装置、搬送方法及程序。
背景技术:
1、之前作为将半导体芯片安装于电路基板的方法,倒装芯片接合广为人知。在所述方法中,首先使从晶片拾取的半导体芯片反转,使半导体芯片的凸块的相反侧的面朝向接合工具而吸附。然后,利用接合工具使半导体芯片的凸块热焊接于电路基板的电极,由此将凸块与电路基板的电极接合(例如参照专利文献1)。
2、现有技术文献
3、专利文献
4、专利文献1:日本专利第3567896号公报
技术实现思路
1、发明所要解决的问题
2、然而,在现有的技术中,在吸附半导体芯片时,在对从接合工具作用于半导体芯片的荷重进行控制的方面尚有改善的余地。
3、再者,此种课题并不限于吸附半导体芯片的情形,在解除半导体芯片的吸附并将半导体芯片从接合工具向其他构件交付的情形时也大致共通。又,此种课题并不限于半导体芯片,在吸附电子组件的情形时大致共通。
4、本发明是为了解决此种问题而完成,提供一种可提高吸附电子组件时或解除吸附时的荷重控制的精度的搬送装置、搬送方法及程序。
5、解决问题的技术手段
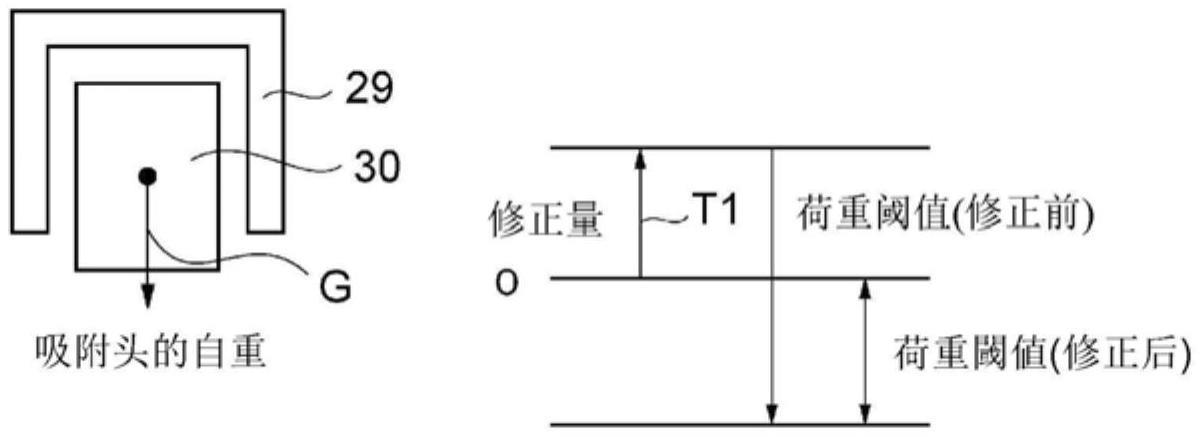
6、本发明的第一实施例中的搬送装置包括:吸附头;移动控制部,使吸附头移动;旋转控制部,对以规定的旋转轴为中心的吸附头的旋转位置进行控制;以及吸附控制部,以伴随吸附头的移动而从吸附头作用于电子组件的荷重成为规定压力以下的方式,使吸附头吸附电子组件或解除吸附,且吸附控制部基于吸附头的旋转位置,设定基于吸附头的自重的规定压力的修正量。
7、又,本发明的第二实施例中的搬送方法包括如下工序:使吸附头移动;对以规定的旋转轴为中心的吸附头的旋转位置进行控制;以伴随吸附头的移动而从吸附头作用于电子组件的荷重成为规定压力以下的方式,使吸附头吸附电子组件或解除吸附;以及基于吸附头的旋转位置,设定基于吸附头的自重的规定压力的修正量。
8、又,本发明的第三实施例中的程序使计算机执行如下处理:使吸附头移动;对以规定的旋转轴为中心的吸附头的旋转位置进行控制;以伴随吸附头的移动而从吸附头作用于电子组件的荷重成为规定压力以下的方式,使吸附头吸附电子组件或解除吸附;以及基于吸附头的旋转位置,设定基于吸附头的自重的规定压力的修正量。
9、发明的效果
10、根据本发明,可提高吸附电子组件时或解除吸附时的荷重控制的精度。
技术特征:
1.一种搬送装置,包括:
2.根据权利要求1所述的搬送装置,其中
3.根据权利要求1或2所述的搬送装置,其中
4.根据权利要求3所述的搬送装置,其中
5.一种搬送方法,包括如下工序:
6.一种程序,使计算机执行如下处理:
技术总结
本发明的搬送装置包括:吸附头,吸附电子组件并搬送;移动控制部,使吸附头移动;旋转控制部,对以规定的旋转轴为中心的吸附头的旋转位置进行控制;以及吸附控制部,以伴随吸附头的移动而自吸附头作用于电子组件的荷重成为规定压力以下的方式,使吸附头吸附电子组件,且移动控制部基于吸附头的旋转位置,设定基于吸附头的自重的规定压力的修正量。通过此种搬送装置,可提高吸附电子组件时或解除吸附时的荷重控制的精度。
技术研发人员:野村胜利
受保护的技术使用者:株式会社新川
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!