执行机构、机器人以及机器人执行方法与流程
本申请涉及巡检设备领域,尤其涉及执行机构、机器人以及机器人执行方法。
背景技术:
1、在电力系统的巡检工作中,需要对设备进行一些操作,例如操作地刀,目前,已经出现了可以操作地刀的设备,而由设备对地刀进行操作,需要将设备精准地与地刀连接在一起后进行操作。
2、但是目前的设备在操作地刀时,由于设备相对地刀移动时存在距离误差,地刀与执行端可能存在偏离,导致执行端并不能很好地与地刀精准连接,在两者存在误差的情况下,执行端在操作地刀时,并不能稳定的对地刀执行相应的操作。
技术实现思路
1、本申请提供了一种执行机构,执行件与输出组件的第二旋转轴同轴或相对于第二旋转轴弯折时能够以自身的第一旋转轴稳定转动,以至于执行件与地刀即使偏离一些距离,也能够与地刀连接并且稳定转动。
2、第一方面,本申请的实施例提供了一种执行机构,包括:
3、驱动组件;
4、调向件,包括第一连接部和相对的第二连接部,所述第一连接部与所述驱动组件传动连接;
5、执行件,与所述第二连接部连接;
6、其中,所述第二连接部与所述第一连接部转动连接,以使得所述执行件的第二旋转轴能够偏离或共轴于所述驱动组件的第一旋转轴。
7、在本申请实施例提供的执行机构中,所述调向件包括万向节,所述万向节的一端与所述驱动组件连接,并且与所述第一旋转轴同轴,可弯折的另一端与所述执行件连接,并且与所述第二旋转轴同轴。
8、在本申请实施例提供的执行机构中,还包括保持机构,与所述第二连接部连接,用于保持所述第二旋转轴与所述第一旋转轴同轴,所述保持机构在所述第二连接部相对于所述第一旋转轴弯折时,能够跟随所述第二连接部弯折。
9、在本申请实施例提供的执行机构中,所述保持机构包括弹性件,所述弹性件的一端与所述第一连接部连接,另一端与所述第二连接部连接。
10、在本申请实施例提供的执行机构中,所述保持机构包括第一弹簧,所述第一弹簧套设在所述调向件的外部,所述第一弹簧的一端与所述第一连接部连接,另一端与所述第二连接部连接。
11、在本申请实施例提供的执行机构中,所述驱动组件包括传动组件和驱动器,所述驱动器与所述传动组件连接,所述驱动器带动所述传动组件转动,所述传动组件远离所述驱动器的一端与所述第一连接部连接。
12、在本申请实施例提供的执行机构中,所述传动组件包括延伸件、轴套以及传输轴,所述延伸件的一端与所述驱动器连接,所述驱动器能够驱动所述延伸转动,所述延伸件相对的另一端与所述轴套连接,所述轴套套设在所述传输轴外部,并且与所述传输轴键连接,所述传输轴远离所述延伸件的一端与所述调向件连接,所述传输轴的轴线为所述第一旋转轴。
13、在本申请实施例提供的执行机构中,所述执行机构还包括第二弹簧,一端与所述驱动器连接,另一端与所述传输轴连接,所述传输轴能够沿所述第一旋转轴滑动。
14、在本申请实施例提供的执行机构中,所述执行机构包括压板组件,用于打开待执行件的封锁件。
15、在本申请实施例提供的执行机构中,所述执行机构包括第一图像识别组件,用于确定所述执行机构相对于所述待执行件的位置。
16、在本申请实施例提供的执行机构中,所述执行机构包括第二图像识别组件,用于确定所述执行件相对于所述待执行件的位置。
17、在本申请实施例提供的执行机构中,所述执行机构包括固定件,套设在所述延伸件远离所述驱动组件的一端,所述延伸件能够相对所述固定件转动。
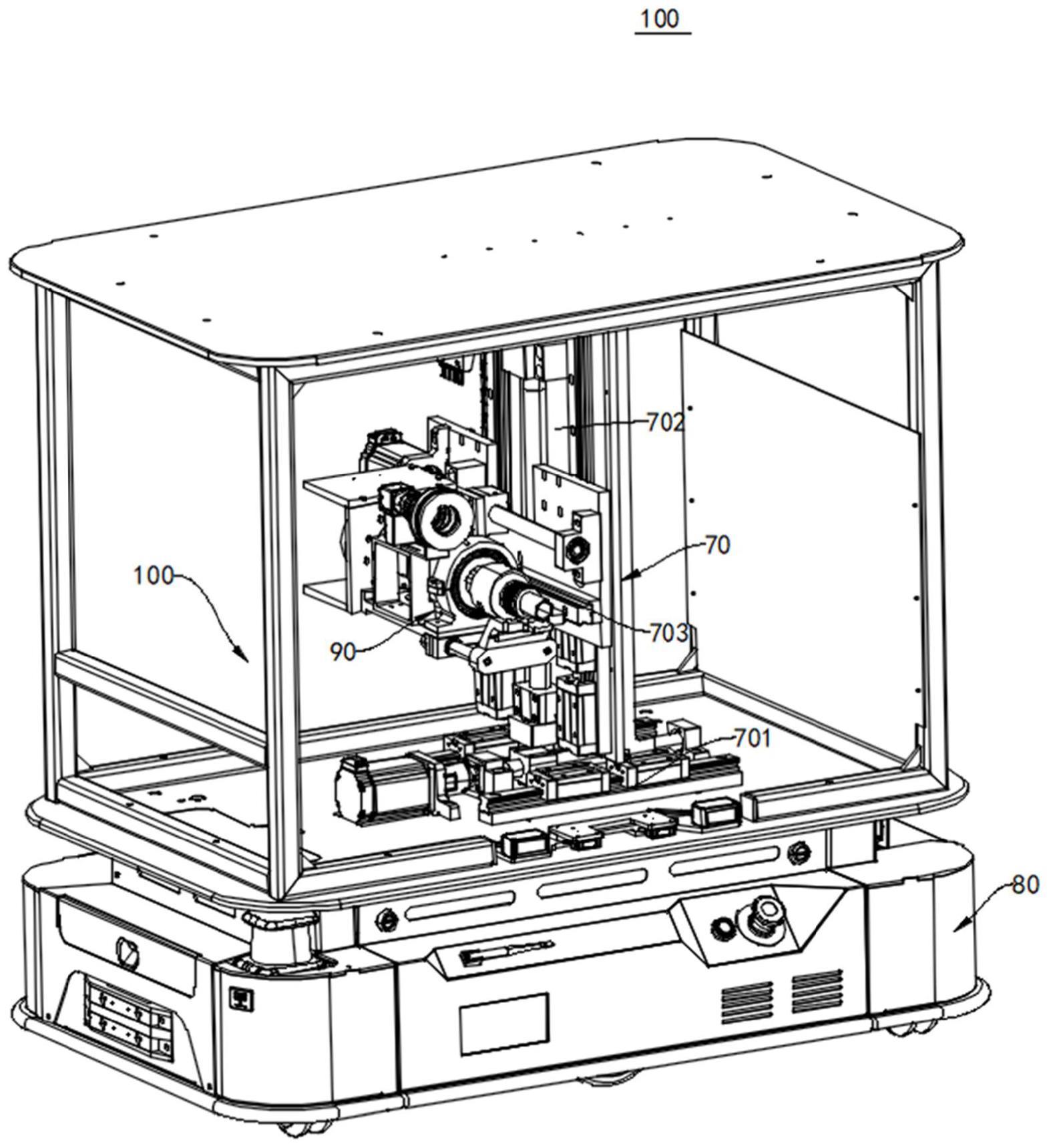
18、第二方面,本申请提供一种机器人,包括:
19、第一方面提供的任一项所述的执行机构,用于对所述待执行件执行一个或多个操作;
20、运动机构,所述执行机构连接在所述运动机构上,所述运动机构用于带动所述执行机构在x轴、y轴以及z轴方向移动;
21、可移动底盘,所述运动机构装设在所述可移动底盘,所述可移动底盘用于带动所述运动机构移动;
22、测距组件,安装在所述可移动底盘,用于确定所述可移动底盘与所述待执行件的相对位置。
23、第三方面,本申请提供一种机器人执行方法,包括:
24、根据导航信息,将所述机器人移动到待操作设备附近;
25、获取所述机器人相对于所述待操作设备的第一位姿信息,根据所述第一位姿信息,移动所述机器人;
26、获取所述机器人相对于所述待操作设备上的待执行部件的第二位姿信息,根据所述第二位姿信息,再次移动所述机器人;
27、获取所述机器人相对于所述待执行部件的第三位姿信息,根据所述第三位姿信息,控制所述机器人对所述待执行部件进行操作。
28、本申请提供的执行机构,基于驱动组件驱动输出组件旋转,进而带动执行件转动,将执行件配置为与所述输出组件的第二旋转轴同轴或相对于所述第二旋转轴弯折,并且所述执行件与所述输出组件的第二旋转轴同轴或相对于所述第二旋转轴弯折时能够以自身的第一旋转轴稳定转动,以至于执行件与地刀即使偏离一些距离,也能够与地刀连接并且稳定转动。本申请提供的机器人,搭载执行机构对地刀进行准确操作,且可多次定位,准确度搞,并且具有执行机构,可以对偏离一些位置的地刀也进行稳定的操作。本申请提供的机器人执行方法,可以多次对地刀进行定位,有效提高机器人的操作精准度。
29、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本申请。
技术特征:
1.一种执行机构,其特征在于,包括:
2.根据权利要求1所述的执行机构,其特征在于,所述调向件包括万向节,所述万向节的一端与所述驱动组件连接,并且与所述第一旋转轴同轴,可弯折的另一端与所述执行件连接,并且与所述第二旋转轴同轴。
3.根据权利要求1所述的执行机构,其特征在于,还包括保持机构,与所述第二连接部连接,用于保持所述第二旋转轴与所述第一旋转轴同轴,所述保持机构在所述第二连接部相对于所述第一旋转轴弯折时,能够跟随所述第二连接部弯折。
4.根据权利要求3所述的执行机构,其特征在于,所述保持机构包括弹性件,所述弹性件的一端与所述第一连接部连接,另一端与所述第二连接部连接。
5.根据权利要求4所述的执行机构,其特征在于,所述保持机构包括第一弹簧,所述第一弹簧套设在所述调向件的外部,所述第一弹簧的一端与所述第一连接部连接,另一端与所述第二连接部连接。
6.根据权利要求1所述的执行机构,其特征在于,所述驱动组件包括传动组件和驱动器,所述驱动器与所述传动组件连接,所述驱动器带动所述传动组件转动,所述传动组件远离所述驱动器的一端与所述第一连接部连接。
7.根据权利要求6所述的执行机构,其特征在于,所述传动组件包括延伸件、轴套以及传输轴,所述延伸件的一端与所述驱动器连接,所述驱动器能够驱动所述延伸转动,所述延伸件相对的另一端与所述轴套连接,所述轴套套设在所述传输轴外部,并且与所述传输轴键连接,所述传输轴远离所述延伸件的一端与所述调向件连接,所述传输轴的轴线为所述第一旋转轴。
8.根据权利要求7所述的执行机构,其特征在于,所述执行机构还包括第二弹簧,一端与所述驱动器连接,另一端与所述传输轴连接,所述传输轴能够沿所述第一旋转轴滑动。
9.根据权利要求1所述的执行机构,其特征在于,所述执行机构包括压板组件,用于打开待执行件的封锁件。
10.根据权利要求1所述的执行机构,其特征在于,所述执行机构包括第一图像识别组件,用于确定所述执行机构相对于所述待执行件的位置。
11.根据权利要求1所述的执行机构,其特征在于,所述执行机构包括第二图像识别组件,用于确定所述执行件相对于所述待执行件的位置。
12.根据权利要求1所述的执行机构,其特征在于,所述执行机构包括固定件,套设在所述延伸件远离所述驱动组件的一端,所述延伸件能够相对所述固定件转动。
13.一种机器人,其特征在于,包括:
14.一种机器人执行方法,其特征在于,包括:
技术总结
本申请提供执行机构、机器人以及机器人执行方法,涉及巡检设备领域,其中,执行机构包括驱动组件,调向件,包括第一连接部和相对的第二连接部,所述第一连接部与所述驱动组件传动连接;执行件,与所述第二连接部连接;其中,所述第二连接部与所述第一连接部转动连接,以使得所述执行件的第二旋转轴能够偏离或共轴于所述驱动组件的第一旋转轴,将执行件配置为与所述输出组件的第二旋转轴同轴或相对于所述第二旋转轴弯折,并且所述执行件与所述输出组件的第二旋转轴同轴或相对于所述第二旋转轴弯折时能够以自身的第一旋转轴稳定转动,以至于执行件与地刀即使偏离一些距离,也能够与地刀连接并且稳定转动。
技术研发人员:苗俊浩,黄宗勇,李磊,闻泉
受保护的技术使用者:深圳优艾智合机器人科技有限公司
技术研发日:
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!