一种带有清洁功能的真空手臂的制作方法
1.本实用新型属于半导体制造技术领域,具体涉及一种带有清洁功能的真空手臂。
背景技术:
2.现有的半导体行业,晶圆片大多需要真空手臂取放片,目前行业内取放片都以直接接触真空吸附片源为主,为确保晶圆形态平整,真空手臂的吸盘孔与吸盘面需保持齐平,从而与晶圆形成良好的贴合吸附效果。
3.然而,随着作业工况的粉尘弥漫,真空手臂的吸盘面表面易粘附灰尘污染,如不能及时清理则会对吸附晶圆表面的平整形态造成破坏,影响产品品质;同时,随着晶圆拾取作业的多次实施,真空手臂的吸盘孔内部容易吸入尘埃颗粒形成堵塞,引起吸附力下降,导致取片过程因吸附力不足而令晶圆摔碎,造成生产损失并阻碍晶圆生产工艺的正常实施。而每次针对上述部位的清洁操作较为繁琐,因此,需要一种新的技术方案加以解决。
技术实现要素:
4.针对上述现有技术中的不足,本实用新型提供了一种带有清洁功能的真空手臂,以此对真空手臂吸盘孔及吸盘面的堵塞、污染实施简易高效的清洁操作,避免生产损失并保障晶圆生产工艺的正常实施。
5.本实用新型通过以下技术方案实施:一种带有清洁功能的真空手臂,包括手臂板,其中,所述手臂板为一端直臂、另一端带有两个延伸臂的y形平板,所述延伸臂下端面贴附设有聚四氟乙烯材质的吸附层,每个所述延伸臂上都贯穿设有操作孔,每个所述操作孔都穿入设有吸嘴,所述吸嘴与所述吸附层的下端面齐平;所述直臂上端面设有正压电磁阀、负压电磁阀,所述正压电磁阀、所述负压电磁阀的输入端分别通过气管连接于压缩泵、真空泵,所述正压电磁阀、所述负压电磁阀的输出端分别通过气管连接于四通管的两个输入端,所述四通管的两个输出端分别通过气管连接于两个所述吸嘴。
6.进一步的,所述负压电磁阀与所述真空泵之间的连接管路设有真空计。
7.进一步的,二个所述吸嘴下方吸附设有晶圆,二个所述吸嘴的连接线与所述晶圆中心线重合。
8.进一步的,所述吸附层呈u形。
9.本实用新型的有益效果是:本装置通过手臂板上分别设置正压电磁阀、负压电磁阀形成的二种回路,将吸嘴作为吸附孔,将吸附层作为贴合吸附面,在针对手臂板延伸臂实施晶圆的多次吸附作业后,可通过更换电磁阀气路对吸嘴内的尘埃堵塞进行一次性吹气清除,同时下端面吸附层的聚四氟乙烯材质提供防粘性及润滑性,以避免灰尘粘附并为晶圆提供光滑平整的贴合面,以此对真空手臂吸盘孔及吸盘面的堵塞、污染实施简易高效的清洁操作,避免生产损失并保障晶圆生产工艺的正常实施。
附图说明
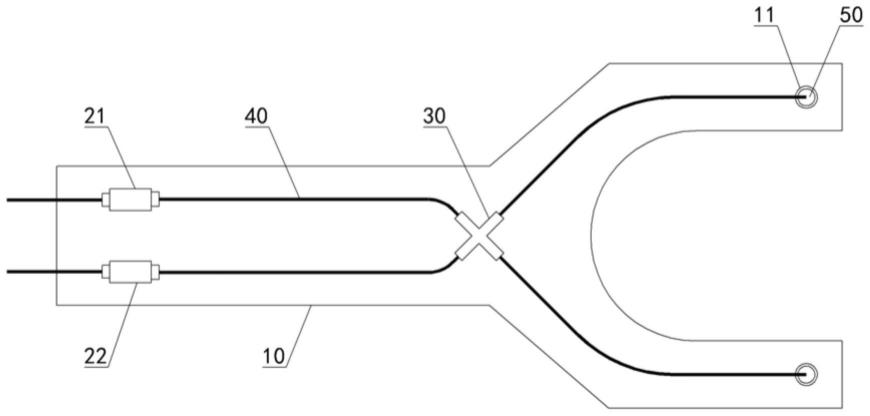
10.图1是本实用新型一实施例的结构俯视图;
11.图2是本实用新型一实施例的结构仰视图;
12.图3是本实用新型一实施例的结构管路连接图;
13.图4是本实用新型一实施例的结构侧视图;
14.图5是本实用新型一实施例的作业状态图。
15.图中:10-手臂板、11-操作孔、12-吸附层、21-正压电磁阀、22-负压电磁阀、30-四通管、40-气管、41-压缩泵、42-真空泵、43-真空计、50-吸嘴、60-晶圆。
具体实施方式
16.下面结合说明书附图及实施例对本实用新型作进一步的详细描述。
17.如图1-图4所示,一种带有清洁功能的真空手臂,包括手臂板10,其中,手臂板10为一端直臂、另一端带有两个延伸臂的y形平板,延伸臂下端面贴附设有聚四氟乙烯材质的吸附层12,每个延伸臂上都贯穿设有操作孔11,每个操作孔11都穿入设有吸嘴50,吸嘴50与吸附层12的下端面齐平;直臂上端面设有正压电磁阀21、负压电磁阀22,正压电磁阀21、负压电磁阀22的输入端分别通过气管40连接于压缩泵41、真空泵42,正压电磁阀21、负压电磁阀22的输出端分别通过气管40连接于四通管30的两个输入端,四通管30的两个输出端分别通过气管40连接于两个吸嘴50,负压电磁阀22与真空泵42之间的连接管路设有真空计43。
18.本实用新型的工作原理如下:
19.开启真空泵42与负压电磁阀22,真空泵42负压吸力经过气管40、负压电磁阀22作用于二个延伸臂上的吸嘴50,而后对晶圆60进行拾取工作(如图5所示),随着拾取操作的多次实施,吸嘴50口的负压会将空气中的灰尘颗粒吸入并造成堵塞,此时真空计43检测到吸附力明显下降,则关闭真空泵42、负压电磁阀22,并开启压缩泵41、正压电磁阀21,令压缩泵41的正压空气经气管40、正压电磁阀21输入至二个吸嘴50,并将流经管路中的堵塞颗粒吹送排出至外界,以此完成一次性清洁工作,之后重新切换成真空泵42负压工作模式,以适应晶圆制造工艺的高效拾取操作,此外,下端面吸附层12的聚四氟乙烯材质可提供防粘性及润滑性,以避免灰尘粘附并为晶圆60提供光滑平整的贴合面,使用者只需间隔较长周期擦拭一次即可,通过上述功能,实现对真空手臂吸盘孔及吸盘面的堵塞、污染实施简易高效的清洁操作,避免生产损失并保障晶圆生产工艺的正常实施。
20.在本实施例中,二个吸嘴50下方吸附设有晶圆60,二个吸嘴50的连接线与晶圆60中心线重合,从而确保晶圆60所受到吸嘴50的吸力作用面尽可能接近中线,防止受力面过于偏向一侧而引发变形,保障晶圆60形态良好。
21.在本实施例中,吸附层12呈u形。在吸附层12与晶圆60贴附时,利用吸附层12的u形轮廓及手臂板10的y形轮廓减小对晶圆60的覆盖面积,晶圆60的热量得以在吸附层12u形轮廓的中部区域顺利散发,有利于高温晶圆60被拾取时的正常冷却,尽可能保障冷却后的晶圆60形态良好。
22.以上所述实施例仅为本实用新型的优选实施方案,并非对本实用新型作出形式上的限制,应当理解,在权利要求书所限定的特征范围内,实施例还可作出其他形式的修改、变动及等同替换,这些都应属于本实用新型的保护范围内。
技术特征:
1.一种带有清洁功能的真空手臂,包括手臂板,其特征在于:所述手臂板一端设有直臂,另一端设有两个延伸臂,所述延伸臂下端面贴附设有吸附层,所述延伸臂上贯穿设有多个操作孔,每个所述操作孔上设有吸嘴,所述直臂上端面设有正压电磁阀、负压电磁阀,所述正压电磁阀、所述负压电磁阀的输入端分别通过气管连接于压缩泵、真空泵,所述正压电磁阀、所述负压电磁阀的输出端分别通过气管连接于四通管的两个输入端,所述四通管的两个输出端分别通过气管连接于两个所述吸嘴。2.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:所述手臂板为y形平板。3.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:所述吸附层采用聚四氟乙烯材质制成。4.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:所述吸嘴与所述吸附层的下端面齐平。5.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:所述负压电磁阀与所述真空泵之间的连接管路设有真空计。6.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:二个所述吸嘴下方吸附设有晶圆,二个所述吸嘴的连接线与所述晶圆中心线重合。7.如权利要求1所述的带有清洁功能的真空手臂,其特征在于:所述吸附层呈u形。
技术总结
本实用新型提供一种带有清洁功能的真空手臂,其中手臂板为一端直臂、另一端带有两个延伸臂的平板,延伸臂下端设有吸附层,延伸臂上贯穿设有操作孔,操作孔穿入设有吸嘴,直臂上端设有正压电磁阀、负压电磁阀,两者分别连于四通管的两个输入端,四通管的两个输出端分别连于两个吸嘴。将吸嘴作为吸附孔,将吸附层作为吸附面,在针对手臂板延伸臂实施晶圆的多次吸附作业后,通过更换电磁阀气路对吸嘴内的尘埃堵塞进行一次性吹气清除,下端面吸附层的聚四氟乙烯材质提供防粘性及润滑性,以避免灰尘粘附并为晶圆提供光滑平整的贴合面,以此对真空手臂吸盘孔及吸盘面的堵塞、污染实施简易高效的清洁操作,避免生产损失并保障晶圆生产工艺的正常实施。工艺的正常实施。工艺的正常实施。
技术研发人员:王瑞华 章程 朱帅 董国庆 文国昇 金从龙
受保护的技术使用者:江西兆驰半导体有限公司
技术研发日:2022.06.28
技术公布日:2022/10/13
相关技术
网友询问留言
已有0条留言
- 还没有人留言评论。精彩留言会获得点赞!
1