一种机器人信号电缆的制作方法
本申请涉及电缆领域,特别涉及一种机器人信号电缆。
背景技术:
1、中国制造2025是自动化和信息化两化融合的过程,工业机器人凭借其自动化、柔性化、智能化的生产特点,成为智能制造中不可或缺的重要部分。而机器人信号电缆被誉为机器人的“血管和神经”,最主要的基本特征就是可以经受长时间的弯曲运动和大角度的扭绞运动且能够保障正常工作。
2、由于机器人设备的运行主要通过机械臂进行,在机械臂进行伸展、拉伸和旋转运动,要求其内部的电缆具有抗拉、抗扭绞和耐强力弯折的特性,而使其缆芯与护套始终紧贴不分离。但目前机器人信号电缆存在的问题主要是电缆抗拉性能差,在使用的过程中容易拉断。
3、鉴于此,我们需要一种抗拉性能良好,在使用的过程中不易拉断的机器人信号电缆。
技术实现思路
1、本申请的目的是解决现有技术中机器人信号电缆抗拉性能差,在使用的过程中容易拉断的问题,为解决上述技术问题,提供一种抗拉性能良好,在使用的过程中不易拉断的机器人信号电缆。
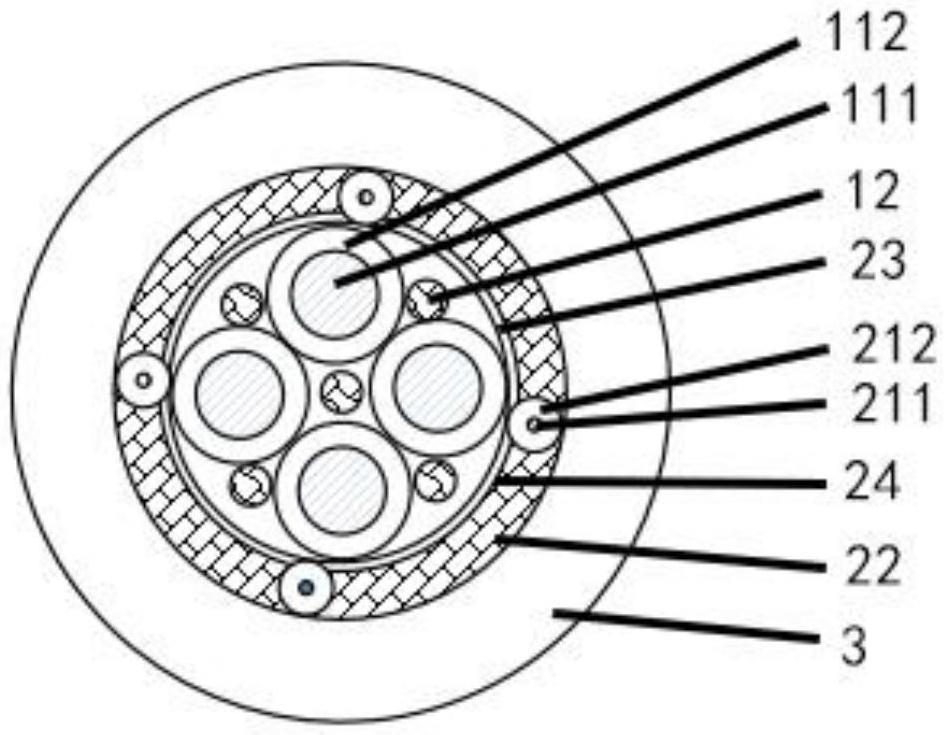
2、为实现上述目的,本申请实施例采用以下技术方案:一种机器人信号电缆,其特征在于,包括:缆芯,缆芯还包括:芯线一,芯线一设置在缆芯中;填充一,填充一与芯线一绞合成缆,填充一为若干根,其中一根设置在缆芯的中央,其余填充一设置在芯线一的间隙中;内护层,内护层包覆缆芯,内护层还包括:芯线二,芯线二还包括:填充二,填充二设置在芯线二的中央;护套一,护套一均匀挤包填充二;屏蔽一,屏蔽一编织屏蔽芯线二;外护套,外护套均匀挤包包覆缆芯及内护层。
3、进一步地,根据本申请实施例,其中,芯线一还包括导体一及绝缘材料一,导体一设置在芯线一中。
4、进一步地,根据本申请实施例,其中,绝缘材料一均匀挤包在导体一外。
5、进一步地,根据本申请实施例,其中,芯线一的数量为若干个。
6、进一步地,根据本申请实施例,其中,内护层还包括包带一及包带二,包带一重复绕包缆芯。
7、进一步地,根据本申请实施例,其中,包带二以90°方向围绕芯线二及屏蔽一间隙绕包。
8、进一步地,根据本申请实施例,其中,包带二采用铝塑复合包带材料。
9、进一步地,根据本申请实施例,其中,芯线二的数量为四根,芯线二分别设置在内护层的圆周90°方向上。
10、进一步地,根据本申请实施例,其中,填充二采用芳纶丝填充,护套一采用镀锡铜丝材料。
11、进一步地,根据本申请实施例,其中,外护套使用的材料为pur外护套。
12、与现有技术相比,本申请通过改变机器人信号电缆的结构及电缆使用的材料解决了机器人信号电缆抗拉性能差,在使用的过程中容易拉断的问题,达到了机器人信号电缆抗拉性能良好,在使用的过程中不易拉断的较好效果。
技术特征:
1.一种机器人信号电缆,其特征在于,包括:
2.根据权利要求1所述的一种机器人信号电缆,其特征在于,所述芯线一还包括导体一及绝缘材料一,所述导体一设置在所述芯线一中。
3.根据权利要求2所述的一种机器人信号电缆,其特征在于,所述绝缘材料一均匀挤包在所述导体一外。
4.根据权利要求3所述的一种机器人信号电缆,其特征在于,所述芯线一的数量为若干个。
5.根据权利要求1所述的一种机器人信号电缆,其特征在于,所述内护层还包括包带一及包带二,所述包带一重复绕包所述缆芯。
6.根据权利要求5所述的一种机器人信号电缆,其特征在于,所述包带二以90°方向围绕所述芯线二及所述屏蔽一间隙绕包。
7.根据权利要求5所述的一种机器人信号电缆,其特征在于,所述包带二采用铝塑复合包带材料。
8.根据权利要求1所述的一种机器人信号电缆,其特征在于,所述芯线二的数量为四根,所述芯线二分别设置在所述内护层的圆周90°方向上。
9.根据权利要求1所述的一种机器人信号电缆,其特征在于,所述填充二采用芳纶丝填充,所述护套一采用镀锡铜丝材料。
10.根据权利要求1所述的一种机器人信号电缆,其特征在于,所述外护套使用的材料为pur外护套。
技术总结
本申请公开了一种机器人信号电缆,其特征在于,包括:缆芯,所述缆芯还包括:芯线一,所述芯线一设置在所述缆芯中;填充一,所述填充一与所述芯线一绞合成缆,所述填充一为若干根,其中一根设置在所述缆芯的中央,其余所述填充一设置在所述芯线一的间隙中;内护层,所述内护层包覆所述缆芯,所述内护层还包括:芯线二,所述芯线二还包括:填充二,所述填充二设置在所述芯线二的中央;护套一,所述护套一均匀挤包所述填充二;屏蔽一,所述屏蔽一编织屏蔽所述芯线二;外护套,所述外护套均匀挤包包覆所述缆芯及所述内护层。本申请通过改变机器人信号电缆的结构及电缆使用的材料解决了机器人信号电缆抗拉性能差,在使用的过程中容易拉断的问题。
技术研发人员:蔚彦丽,齐刚,邱绍坤,荣沭,俞俊,谢清心
受保护的技术使用者:优易电缆(张家港)有限公司
技术研发日:20220926
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!