一种高强度机器人电缆的制作方法
本技术涉及电缆,具体为一种高强度机器人电缆。
背景技术:
1、机器人是一种能够半自主或全自主工作的智能机器,机器人能够通过编程和自动控制来执行诸如作业或移动等任务,种类多种多样,可以依据设定的程序进行运转,实现高重复度的工作,机器人在工作过程中的能量供给和信息交换主要依靠对应的电缆进行,随着电缆的发展,各种各样的电缆都用到了机器人中,但是不同的安装位置导致了电缆所需要的性能也就不一样。
2、现有的机器人电缆主要作用还是为机器人结构进行供电,对电缆的要求主要为强度上的要求,机器人在实际进行工作的过程中,机械结构需要进行运转,运转的过程中便会牵动电缆偏转,部分机构工作时或会与电缆之间产生一定的接触,对电缆的外部进行挤压,现有的机器人电缆在受到强度过高的压力作用时,其外部用于保护的绝缘橡胶外壳易受到损坏,继而无法对内部包裹的电缆进行有效的防滑,且受到挤压后电缆的外部易发生明显的形变,缓冲能力较差,为此,我们设计了一种高强度机器人电缆来解决上述问题。
技术实现思路
1、针对现有技术的不足,本实用新型提供了一种高强度机器人电缆,解决了上述背景技术中提出的问题。
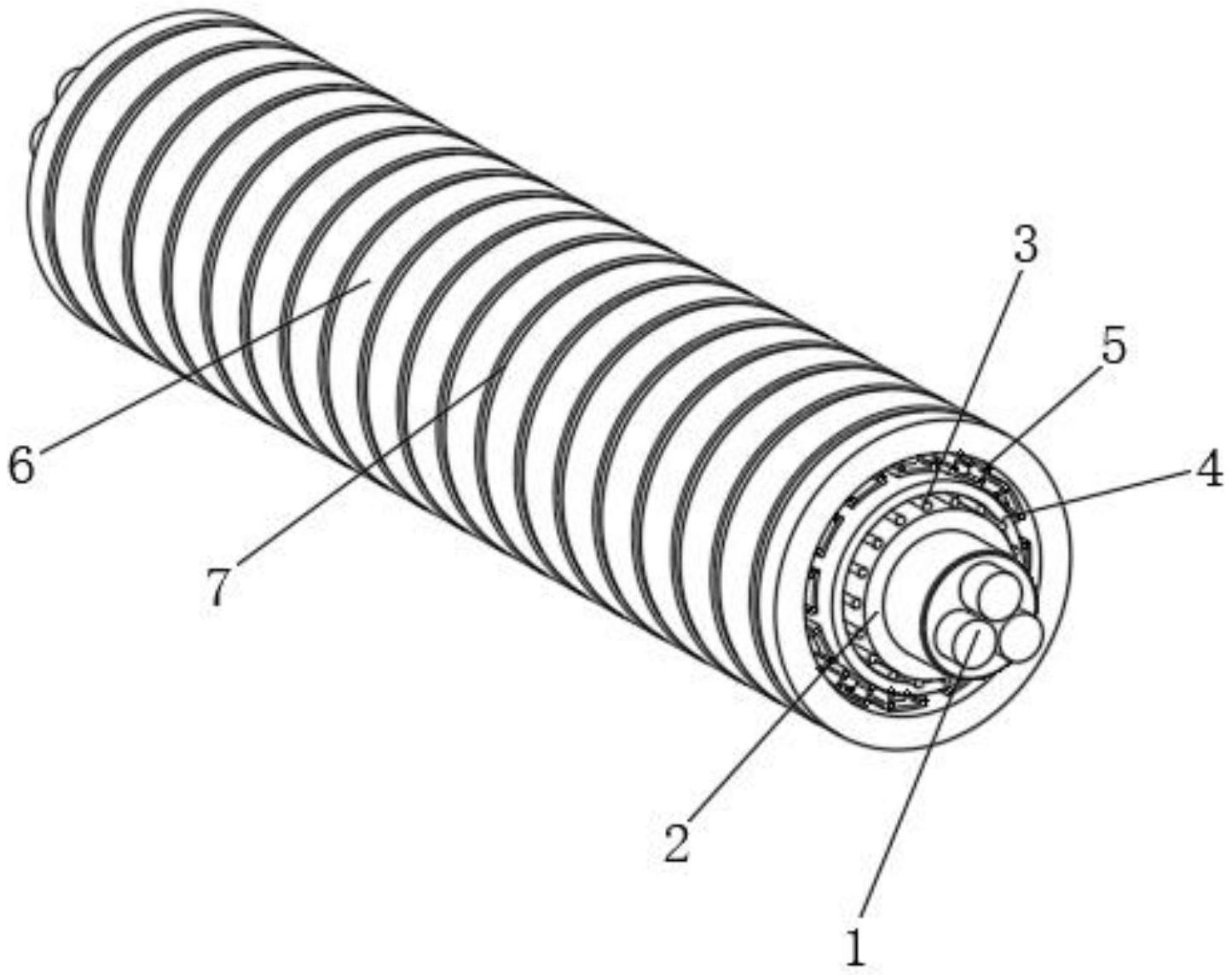
2、为实现以上目的,本实用新型通过以下技术方案予以实现:一种高强度机器人电缆,包括电缆芯,所述电缆芯与机器人之间电性连接,且电缆芯的外侧套接有第三橡胶层,所述电缆芯与第三橡胶层之间依次套接有第一橡胶层和第二橡胶层,所述第一橡胶层的外部包裹有可对电缆芯、第一橡胶层整体进行防护的丝网层,所述第二橡胶层与第三橡胶层之间连接有均匀分布的用于缓冲的缓冲管,所述第一橡胶层、第二橡胶层、第三橡胶层均采用绝缘橡胶制成。
3、进一步的,所述丝网层采用低碳钢制成,且丝网层连接第一橡胶层和第二橡胶层之间。
4、进一步的,所述缓冲管中开设有压缩腔,所述压缩腔中装配有均匀分布的弹性片。
5、进一步的,所述弹性片呈波浪形,且弹性片采用弹性金属制成。
6、进一步的,所述缓冲管的外部开设有位于压缩腔两侧的膨胀侧壁,且缓冲管之间间隔有伸缩腔。
7、进一步的,所述第三橡胶层的外部开设有均匀分布的定位槽,所述定位槽位于相邻两组弹性片之间。
8、本实用新型提供了一种高强度机器人电缆,具备以下有益效果:
9、1、该高强度机器人电缆,通过电缆芯和第一橡胶层以及丝网层和第三橡胶层的配合使用,使得该高强度机器人电缆的主体为电缆芯,电缆芯的外侧依次包裹有第一橡胶层、丝网层、第二橡胶层、第三橡胶层,丝网层采用金属丝网制成,包裹在第一橡胶层的外部,对电缆芯、第一橡胶层整体进行防护的同时具备良好的形变能力,能够跟随电缆芯、第一橡胶层与机器人结构一同活动,第三橡胶层即使受到强烈的挤压产生破损,丝网层依然可对第一橡胶层和电缆芯进行良好的包裹防护,并通过第一橡胶层防止漏电事故的发生,提升了该机器人电缆的强度。
10、2、该高强度机器人电缆,通过缓冲管和弹性片以及压缩腔和膨胀侧壁的配合使用,使得该高强度机器人电缆在第三橡胶层和第二橡胶层之间设置了均匀分布的缓冲管,当第三橡胶层的外部受到挤压时,第三橡胶层发生形变,压力作用于缓冲管上,缓冲管内侧的弹性片在压缩腔中弯曲,同时缓冲管两侧的膨胀侧壁向外膨胀,对第三橡胶层受到的压力进行缓冲,压力散去后,缓冲管和膨胀侧壁再在弹性片弹力的作用下复位,从而有效的提升该高强度机器人电缆的抗冲击能力。
技术特征:
1.一种高强度机器人电缆,包括电缆芯(1),所述电缆芯(1)与机器人之间电性连接,且电缆芯(1)的外侧套接有第三橡胶层(6),其特征在于:所述电缆芯(1)与第三橡胶层(6)之间依次套接有第一橡胶层(2)和第二橡胶层(4),所述第一橡胶层(2)的外部包裹有可对电缆芯(1)、第一橡胶层(2)整体进行防护的丝网层(3),所述第二橡胶层(4)与第三橡胶层(6)之间连接有均匀分布的用于缓冲的缓冲管(5),所述第一橡胶层(2)、第二橡胶层(4)、第三橡胶层(6)均采用绝缘橡胶制成。
2.根据权利要求1所述的一种高强度机器人电缆,其特征在于:所述丝网层(3)采用低碳钢制成,且丝网层(3)连接第一橡胶层(2)和第二橡胶层(4)之间。
3.根据权利要求1所述的一种高强度机器人电缆,其特征在于:所述缓冲管(5)中开设有压缩腔(10),所述压缩腔(10)中装配有均匀分布的弹性片(8)。
4.根据权利要求3所述的一种高强度机器人电缆,其特征在于:所述弹性片(8)呈波浪形,且弹性片(8)采用弹性金属制成。
5.根据权利要求1所述的一种高强度机器人电缆,其特征在于:所述缓冲管(5)的外部开设有位于压缩腔(10)两侧的膨胀侧壁(11),且缓冲管(5)之间间隔有伸缩腔(9)。
6.根据权利要求1所述的一种高强度机器人电缆,其特征在于:所述第三橡胶层(6)的外部开设有均匀分布的定位槽(7),所述定位槽(7)位于相邻两组弹性片(8)之间。
技术总结
本技术公开了一种高强度机器人电缆,涉及电缆技术领域,包括电缆芯,所述电缆芯与机器人之间电性连接。该高强度机器人电缆,通过电缆芯和第一橡胶层以及丝网层和第三橡胶层的配合使用,使得该高强度机器人电缆的主体为电缆芯,电缆芯的外侧依次包裹有第一橡胶层、丝网层、第二橡胶层、第三橡胶层,丝网层采用金属丝网制成,包裹在第一橡胶层的外部,对电缆芯、第一橡胶层整体进行防护的同时具备良好的形变能力,能够跟随电缆芯、第一橡胶层与机器人结构一同活动,第三橡胶层即使受到强烈的挤压产生破损,丝网层依然可对第一橡胶层和电缆芯进行良好的包裹防护,并通过第一橡胶层防止漏电事故的发生,提升了该机器人电缆的强度。
技术研发人员:毛旺彬,郭静,罗国文,王浩,赖吉昌
受保护的技术使用者:广州市联普电线电缆有限公司
技术研发日:20221008
技术公布日:2024/1/12
- 还没有人留言评论。精彩留言会获得点赞!