一种单电机驱动的晶圆盒开合装置的制作方法
本技术属于晶圆加工相关,尤其涉及一种单电机驱动的晶圆盒开合装置。
背景技术:
1、晶圆盒作为晶圆的载具,装载着晶圆在不同工站之间流通过程中使用,晶圆盒内部装有cst,cst内装有晶圆片。
2、晶圆加工流通过程中需要通过人工方式将放置好的晶圆盒打开盖子,并通过人工方式将装载有晶圆片的cst从晶圆盒中取出,再将装有晶圆片的cst放在晶圆加工设备的lp,加工完后需要人工将放置好的晶圆盒打开盖子,并将cst从设备的lp取下再装入晶圆盒中,需要耗费大量的人力,且加工效率低下。李海新等在中国发明公开专利109378292a中公开了“一种用于晶圆片卡塞自动装盒子的搬运机构”,该方案中公开了一种开盒机构,包括第一工作台,所述第一工作台上设置有用于放置所述盒子的旋转台,所述旋转台一侧设置有用于打开所述盒子的夹紧模组;所述夹紧模组包括与第二电机传动连接的转轴,所述转轴的两端均固定有摆臂组件,所述摆臂组件包括支撑臂,所述支撑臂的内侧沿其长度方向移动设置有伸缩臂,所述伸缩臂与所述支撑臂之间设置有缓冲件,所述伸缩臂的前端固定有安装座,所述安装座的内侧设置有沿所述盒子方向来回运动的压轮,所述压轮与第一气缸连接,所述支撑臂上端固定有沿所述安装座方向来回运动的第二气缸,所述安装座上端固定有所述第二气缸可以触及并推动的挡板,所述支撑臂上设置有可以检测所述盒子位置的对射光纤,虽然可以通过该开盒机构减少人力的耗费,但该开盒机构的结构复杂,需要采用多个动力源驱动,且体积大,不能满足现有的使用需求。
技术实现思路
1、为了解决现有技术中存在的问题,本实用新型提供了一种单电机驱动的晶圆盒开合装置,可以自动打开晶圆盒供自动化设备抓取晶圆盒内cst,抓取完后此装置能自动关闭晶圆盒盖,实现晶圆加工过程的自动化,且结构简单。
2、为了实现本发明目的,本实用新型提供的一种单电机驱动的晶圆盒开合装置,包括基座、动力单元、左夹臂、右夹臂、定位块单元、两个凸轮、定位凸轮随动器和联动夹紧单元,
3、动力单元用于提供旋转驱动力,动力单元包括旋转轴,左夹臂和右夹臂与旋转轴的两侧连接以在动力单元的驱动下进行上下移动以开合晶圆盒,且两个凸轮分别设置在旋转轴的两侧且位于左夹臂和右夹臂的内侧;
4、其中,左夹臂和右夹臂均包括固定杆、摆动杆、滑轮、摆动单元和夹抱凸轮随动器,摆动杆与固定杆的一端铰接,滑轮设置在摆动杆的自由端部,摆动单元设置在固定杆内部,夹抱凸轮随动器与摆动单元滑动接触,且夹抱凸轮随动器能够与凸轮接触以沿着凸轮的轮廓发生沿旋转轴轴向方向的伸缩,且左夹臂上还设置有定位凸轮导向块;
5、定位块单元设置在基座上;
6、联动夹紧单元设置在基座上,与定位块单元连接以带动定位块单元夹紧晶圆盒;
7、定位凸轮随动器与联动夹紧单元连接,且能够与定位凸轮导向块配合。
8、进一步地,所述动力单元包括电机、传动组件和旋转轴,电机通过传动组件与旋转轴连接,左夹臂和右夹臂分别与旋转轴的两端固定连接。
9、进一步地,还包括两缓冲垫,两缓冲垫分别位于基座的两侧且与左夹臂和右夹臂的位置相对应。
10、进一步地,联动夹紧单元包括中心架、定位弹簧、主动连杆和从动连杆,定位弹簧的一端与中心架连接,另一端与基座固定连接,中心架转动设置在基座上,主动连杆和从动连杆均与中心架铰接,且定位块单元和从动连杆连接以在中心架的转动下夹紧晶圆盒,定位凸轮随动器与主动连杆固定连接,且能够与定位凸轮导向块配合。
11、进一步地,从动连杆有三个,定位块单元包括前定位块、后定位块、两个侧定位块,前定位块和后定位块相对设置在基座的前方和后方,两个侧定位块分别位于基座两侧,前定位块、后定位块和两侧定位块围成的区域为晶圆盒放置位置,其中,后定位块固定设置,前定位块和两个侧定位块分别与相应的从动连杆连接使得在中心架驱动下两侧定位块做相向运动、前定位块向后定位块方向运动以夹紧晶圆盒。
12、进一步地,在主动连杆与定位凸轮随动器之间、定位块单元和从动连杆之间均还设置有滑块,滑块滑动设置在基座上。
13、进一步地,基座上相应开设有滑槽,各个滑块相应滑动设置在滑槽内。
14、进一步地,滑轮的轴心沿着左夹臂或右夹臂的旋转切线方向。
15、进一步地,摆动杆的铰点位置设置在摆动杆的小于二分之一长度的位置处。
16、进一步地,摆动单元包括撬杆和夹抱弹簧,固定杆与摆动杆相对的一面内开设有空腔,撬杆和夹抱弹簧均位于空腔内,夹抱弹簧两端分别顶在固定杆与摆动杆的内壁,撬杆的一端与摆动杆滑动接触,另一端与夹抱凸轮随动器滑动接触,且撬杆与固定杆铰接。
17、本实用新型所提供的开合装置只需一个电机即可控制所有动作,结构简单且实用。
技术特征:
1.一种单电机驱动的晶圆盒开合装置,其特征在于,包括基座(1)、动力单元(5)、左夹臂(2)、右夹臂(3)、定位块单元(6)、两个凸轮(8)、定位凸轮随动器(9)和联动夹紧单元(4),
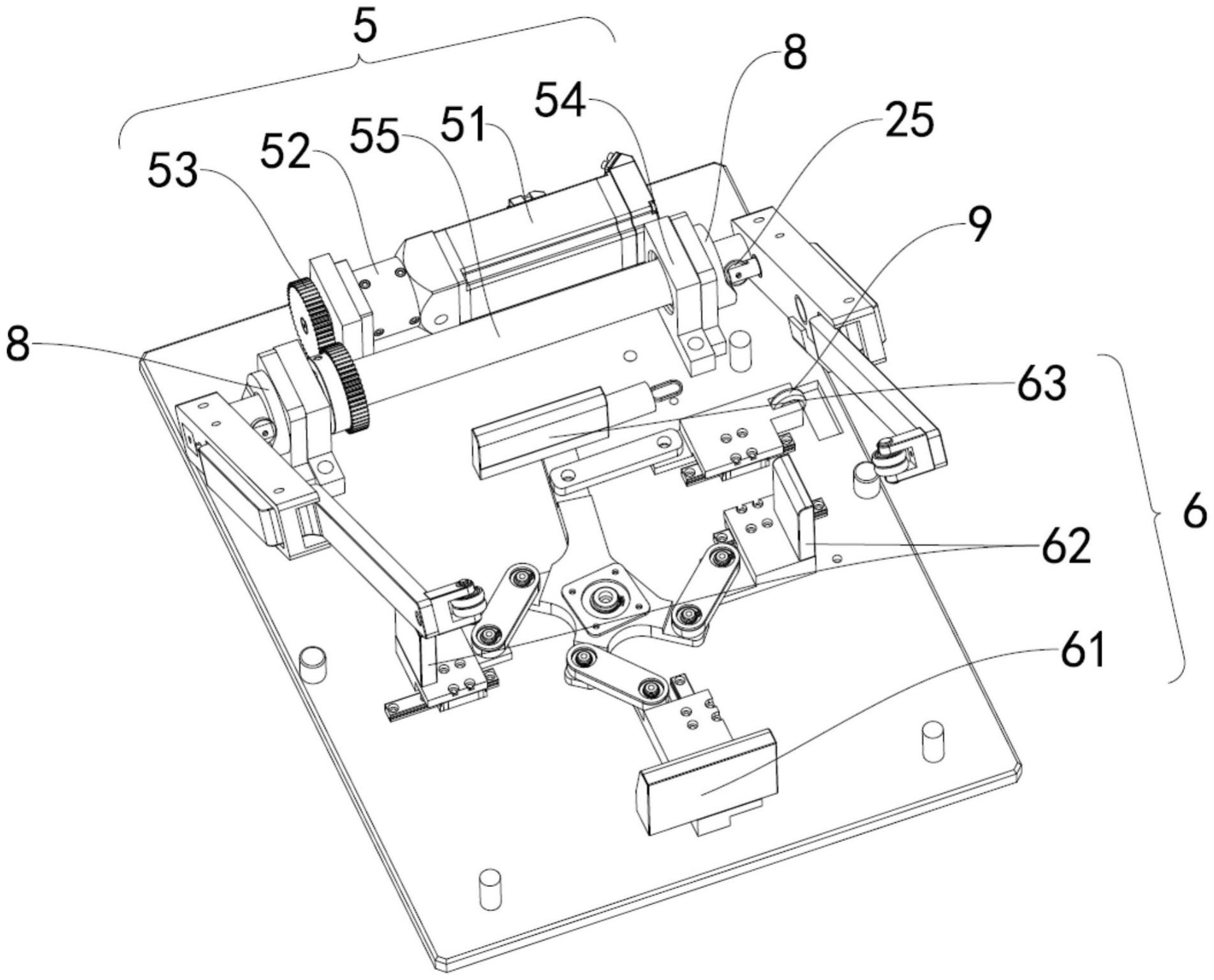
2.根据权利要求1所述的一种单电机驱动的晶圆盒开合装置,其特征在于,所述动力单元(5)包括电机(51)、传动组件(53)和旋转轴(55),电机(51)通过传动组件(53)与旋转轴(55)连接,左夹臂(2)和右夹臂(3)分别与旋转轴(55)的两端固定连接。
3.根据权利要求1所述的一种单电机驱动的晶圆盒开合装置,其特征在于,还包括两缓冲垫(7),两缓冲垫(7)分别位于基座(1)的两侧且与左夹臂(2)和右夹臂(3)的位置相对应。
4.根据权利要求1所述的一种单电机驱动的晶圆盒开合装置,其特征在于,联动夹紧单元(4)包括中心架(41)、定位弹簧(46)、主动连杆(42)和从动连杆(44),定位弹簧(46)的一端与中心架(41)连接,另一端与基座(1)固定连接,中心架(41)转动设置在基座(1)上,主动连杆(42)和从动连杆(44)均与中心架(41)铰接,且定位块单元(6)和从动连杆(44)连接以在中心架(41)的转动下夹紧晶圆盒,定位凸轮随动器(9)与主动连杆(42)固定连接,且能够与定位凸轮导向块(26)配合。
5.根据权利要求4所述的一种单电机驱动的晶圆盒开合装置,其特征在于,从动连杆(44)有三个,定位块单元(6)包括前定位块(61)、后定位块(63)、两个侧定位块(62),前定位块(61)和后定位块(63)相对设置在基座(1)的前方和后方,两个侧定位块(62)分别位于基座(1)两侧,前定位块(61)、后定位块(63)和两侧定位块(62)围成的区域为晶圆盒放置位置,其中,后定位块(63)固定设置,前定位块(61)和两个侧定位块(62)分别与相应的从动连杆(44)连接使得在中心架(41)驱动下两侧定位块(62)做相向运动、前定位块(61)向后定位块(63)方向运动以夹紧晶圆盒。
6.根据权利要求4所述的一种单电机驱动的晶圆盒开合装置,其特征在于,在主动连杆(42)与定位凸轮随动器(9)之间、定位块单元(6)和从动连杆(44)之间均还设置有滑块,滑块滑动设置在基座(1)上。
7.根据权利要求6所述的一种单电机驱动的晶圆盒开合装置,其特征在于,
8.根据权利要求1所述的一种单电机驱动的晶圆盒开合装置,其特征在于,滑轮(23)的轴心沿着左夹臂(2)或右夹臂(3)的旋转切线方向。
9.根据权利要求1所述的一种单电机驱动的晶圆盒开合装置,其特征在于,摆动杆(22)的铰点位置设置在摆动杆(22)的小于二分之一长度的位置处。
10.根据权利要求1-9任一所述的一种单电机驱动的晶圆盒开合装置,其特征在于,摆动单元包括撬杆(24)和夹抱弹簧(27),固定杆(21)与摆动杆(22)相对的一面内开设有空腔,撬杆(24)和夹抱弹簧(27)均位于空腔内,夹抱弹簧(27)两端分别顶在固定杆(21)与摆动杆(22)的内壁,撬杆(24)的一端与摆动杆(22)滑动接触,另一端与夹抱凸轮随动器(25)滑动接触,且撬杆(24)与固定杆(21)铰接。
技术总结
本技术公开的一种单电机驱动的晶圆盒开合装置,包括基座、动力单元、左夹臂、右夹臂、定位块单元、两个凸轮、定位凸轮随动器和联动夹紧单元,动力单元用于提供旋转驱动力,动力单元包括旋转轴,左夹臂和右夹臂与旋转轴的两侧连接以在动力单元的驱动下进行上下移动以开合晶圆盒,且两个凸轮分别设置在旋转轴的两侧且位于左夹臂和右夹臂的内侧;定位块单元设置在基座上;联动夹紧单元设置在基座上,与定位块单元连接以带动定位块单元夹紧晶圆盒;定位凸轮随动器与联动夹紧单元连接,且能够与定位凸轮导向块配合。本技术所提供的开合装置只需一个电机即可控制所有动作,结构简单且实用。
技术研发人员:刘吉意,韩笑,李节林
受保护的技术使用者:斯坦德机器人(深圳)有限公司
技术研发日:20221208
技术公布日:2024/1/11
- 还没有人留言评论。精彩留言会获得点赞!