激光源驱动电路、深度相机电路系统及深度相机的制作方法
本技术涉及半导体,具体涉及一种激光源驱动电路、深度相机电路系统及深度相机。
背景技术:
1、目前,随着科学技术的飞速发展,越来越多的服务类机器人进入人们生活,扫地机器人就是其中一种。扫地机器人需要传感器来感知前方的障碍物,通过内部运算单元实现避障和路径规划。目前市面上的传感器装置原理主要是超声波雷达、结构光、tof(time-of-flight,飞行时间)、激光雷达,其中结构光应用最为广泛。结构光视觉技术是一种主动投影式的三维测量技术,通过使用激光投射模块和相机组成的系统来对物体进行三维测量。
2、现在市面上应用在扫地机器人上面的结构光电路方案大同小异,普遍存在激光安全防护策略单一、激光驱动电路集成度不高、不能灵活适配外界信号电平和方向等问题。
3、因此,现有技术有待于改善。
技术实现思路
1、本实用新型的主要目的在于提出一种激光源驱动电路、深度相机电路系统及深度相机,以至少能够解决相关技术中激光安全防护策略单一的技术问题。
2、本实用新型的第一方面,提供了一种激光源驱动电路,dc/dc单元,与电源连接,用于将电源输入的电压进行变压处理,得到电压满足目标范围的输入电能,并接收主控单元的使能信号,选择性将所述输入电能发送给所述限流保护单元;限流保护单元,用于将所述输入电能转发给所述驱动单元,并检测所述输入电能的电流值,选择性向所述主控单元和所述驱动单元反馈电流异常信号,以控制所述dc/dc单元和所述驱动单元关闭输出;驱动单元,用于接收所述输入电能、所述主控单元的驱动信号和所述电流异常信号,以驱动所述激光源发射光信号。
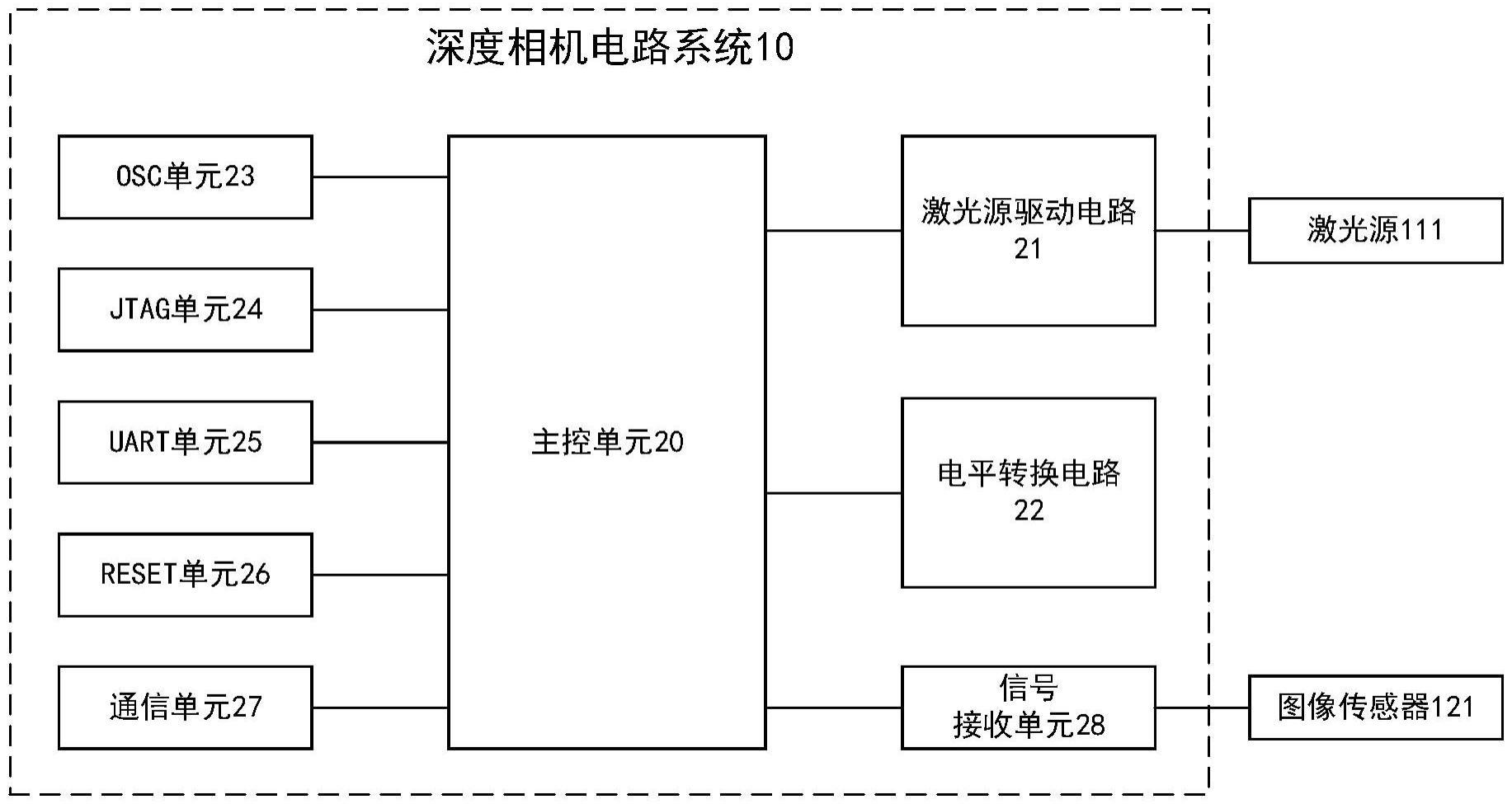
3、本实用新型的第二方面,提供了一种深度相机电路系统,包括主控单元及第一方面的激光源驱动电路。
4、本实用新型的第三方面,提供了一种深度相机,包括投射模组、成像模组和第二方面的深度相机电路系统;投射模组,用于向目标物体发射光信号;成像模组,用于获取目标物体反射的光信号并生成电信号;深度相机电路系统,用于控制投射模组和成像模组的开断,还用于接收成像模组反馈的所述电信号,并根据所述电信号计算所述目标物体的深度信息。
5、本实用新型提供的激光源驱动电路dc/dc单元,其与电源连接,用于将电源输入的电压进行变压处理,得到电压满足目标范围的输入电能,并接收主控单元的使能信号,选择性将所述输入电能发送给所述限流保护单元;限流保护单元,用于将所述输入电能转发给所述驱动单元,并检测所述输入电能的电流值,选择性向所述主控单元和所述驱动单元反馈电流异常信号,以控制所述dc/dc单元和所述驱动单元关闭输出;驱动单元,用于接收所述输入电能、所述主控单元的驱动信号和所述电流异常信号,以驱动所述激光源发射光信号。如此,激光驱动电路通过多种手段控制激光源的工作状态,形成全面激光安全防护策略,能够提高激光源使用过程的安全性。
技术特征:
1.一种激光源驱动电路,其特征在于,包括:
2.如权利要求1所述激光源驱动电路,其特征在于,还包括:
3.如权利要求1所述激光源驱动电路,其特征在于,所述dc/dc单元包括电压变换ic,所述电压变换ic包括:
4.如权利要求1所述激光源驱动电路,其特征在于,所述限流保护单元包括限流ic,所述限流ic包括:
5.如权利要求1所述激光源驱动电路,其特征在于,所述驱动单元包括驱动ic,所述驱动ic包括:
6.如权利要求2所述激光源驱动电路,其特征在于,所述温度监测电路包括:
7.一种深度相机电路系统,其特征在于,包括主控单元和如权利要求1-6中任一项所述激光源驱动电路。
8.如权利要求7所述深度相机电路系统,其特征在于,还包括与主控单元连接的电平转换电路;
9.如权利要求7所述深度相机电路系统,其特征在于,还包括信号接收单元,用于将图像传感器生成的成像电信号发送给所述主控单元。
10.一种深度相机,其特征在于,包括投射模组、成像模组和如权利要求7-9中任一项所述深度相机电路系统;
技术总结
本技术提供了一种激光源驱动电路、深度相机电路系统及深度相机,该激光源驱动电路包括DC/DC单元,用于将电源输入的电压进行变压处理,得到电压满足目标范围的输入电能,并接收主控单元的使能信号,选择性将输入电能发送给所述限流保护单元;限流保护单元,用于将输入电能转发给驱动单元,并检测输入电能的电流值,选择性向主控单元和驱动单元反馈电流异常信号,以控制DC/DC单元和驱动单元关闭输出;驱动单元,用于接收输入电能、主控单元的驱动信号和电流异常信号,以驱动激光源发射光信号。如此,激光驱动电路通过多种手段控制激光源的工作状态,形成全面激光安全防护策略,能够提高激光源使用过程的安全性。
技术研发人员:赵波,缪向荣,张丁军
受保护的技术使用者:奥比中光科技集团股份有限公司
技术研发日:20221221
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!