叠片机的制作方法
本技术涉及电池,尤其涉及一种叠片机。
背景技术:
1、目前,锂离子电池具有比能量高、循环次数多、存储时间长、单体电芯容量大等优点,不仅在便携式电子设备上得到了广泛应用,如移动电话、数码相机以及手提电脑等,而且也扩展应用在电动自行车、电动汽车、移动基站和储能电站等领域,可见,锂离子电池拥有广阔的市场空间。在这种情况下,电池在生产过程中的产品质量与生产效率就显得尤为重要。
2、锂电池在生产过程中,主要以卷绕及叠片两种工艺为主导。相比较而言,叠片工艺的电芯比卷绕工艺的电芯具有更低的内阻,更高的放电平台,高容量密度与高能量密度的优势,适用的范围也相对较广。然而,叠片工艺过程的复杂性限制了产能效率,现有的叠片工艺均要依靠机械的往复动作实现,其生产效率远不如卷绕工艺的生产效率。
3、现有的叠片机只有一个叠片工位和一个机械臂,该机械臂需要从正极上料位取料,放置到叠片工位,再从负极上料位取料,放置到叠片工位。使用现有的叠片机致使叠片工艺的电芯生产周期长,生产效率低,生产成本高。
4、因此,亟需一种叠片机,以解决上述问题。
技术实现思路
1、本实用新型的目的在于:提供一种叠片机,能够缩短电芯的生产周期,提高生产效率,降低生产成本。
2、为达此目的,本实用新型采用以下技术方案:
3、提供一种叠片机,包括:
4、正极输送机构,用于输送正极片至正极上料位置;
5、负极输送机构,用于输送负极片至负极上料位置,所述正极上料位置与所述负极上料位置沿第一方向相对设置;
6、两个正极机械臂,包括第一正极机械臂和第二正极机械臂,所述第一正极机械臂能够取所述正极上料位置处的所述正极片,并将所述正极片转移至第一叠片工位,所述第二正极机械臂能够取所述正极上料位置处的所述正极片,并将所述正极片转移至第二叠片工位,所述第一叠片工位与所述第二叠片工位沿第二方向相对设置,所述第一正极机械臂和所述第二正极机械臂能够交替取料;
7、两个负极机械臂,包括第一负极机械臂和第二负极机械臂,所述第一负极机械臂能够取所述负极上料位置处的所述负极片,并将所述负极片转移至所述第一叠片工位,所述第二负极机械臂能够取所述负极上料位置处的所述负极片,并将所述负极片转移至所述第二叠片工位,所述第一负极机械臂和所述第二负极机械臂能够交替取料,所述第一正极机械臂和所述第一负极机械臂能够交替放料,所述第二正极机械臂和所述第二负极机械臂能够交替放料。
8、作为叠片机的一种优选方案,还包括两个叠片平台,两个所述叠片平台分别设置在所述第一叠片工位与所述第二叠片工位处,以使所述正极片和所述负极片堆叠在两个所述叠片平台上,所述叠片平台能够沿所述第一方向、所述第二方向以及竖直方向移动。
9、作为叠片机的一种优选方案,所述叠片平台为uvw对位平台。
10、作为叠片机的一种优选方案,所述正极输送机构还包括正极检测设备,所述正极检测设备设置在所述正极上料位置,以测量所述正极上料位置处的所述正极片的偏移量,所述正极检测设备与两个所述叠片平台均通讯连接。
11、作为叠片机的一种优选方案,所述负极输送机构还包括负极检测设备,所述负极检测设备设置在所述负极上料位置,以测量所述负极上料位置处的所述负极片的偏移量,所述负极检测设备与两个所述叠片平台均通讯连接。
12、作为叠片机的一种优选方案,还包括两组叠片平台,两组所述叠片平台分别设置在所述第一叠片工位与所述第二叠片工位处,每组所述叠片平台包括n个所述叠片平台,每个所述叠片平台均用于堆叠所述正极片和所述负极片,每个所述叠片平台均能够沿所述第一方向、所述第二方向以及竖直方向移动,n为大于等于2的正整数。
13、作为叠片机的一种优选方案,所述第一正极机械臂、所述第二正极机械臂、所述第一负极机械臂以及第二负极机械臂均配置有n个机械手,以一次取n个所述正极片或所述负极片,并分别放置在n个所述叠片平台上。
14、作为叠片机的一种优选方案,所述正极输送机构和/或所述负极输送机构为磁悬浮输送线。
15、作为叠片机的一种优选方案,所述正极输送机构的输送方向与所述负极输送机构的输送方向平行。
16、作为叠片机的一种优选方案,所述正极上料位置的中心点与所述负极上料位置的中心点之间的距离为a,所述第一叠片工位的中心点与所述第二叠片工位的中心点之间的距离为b,满足a=b;
17、所述正极上料位置的中心点与所述第一叠片工位的中心点之间的距离为c,所述正极上料位置的中心点与所述第二叠片工位的中心点之间的距离为d,满足c=d。
18、本实用新型的有益效果:
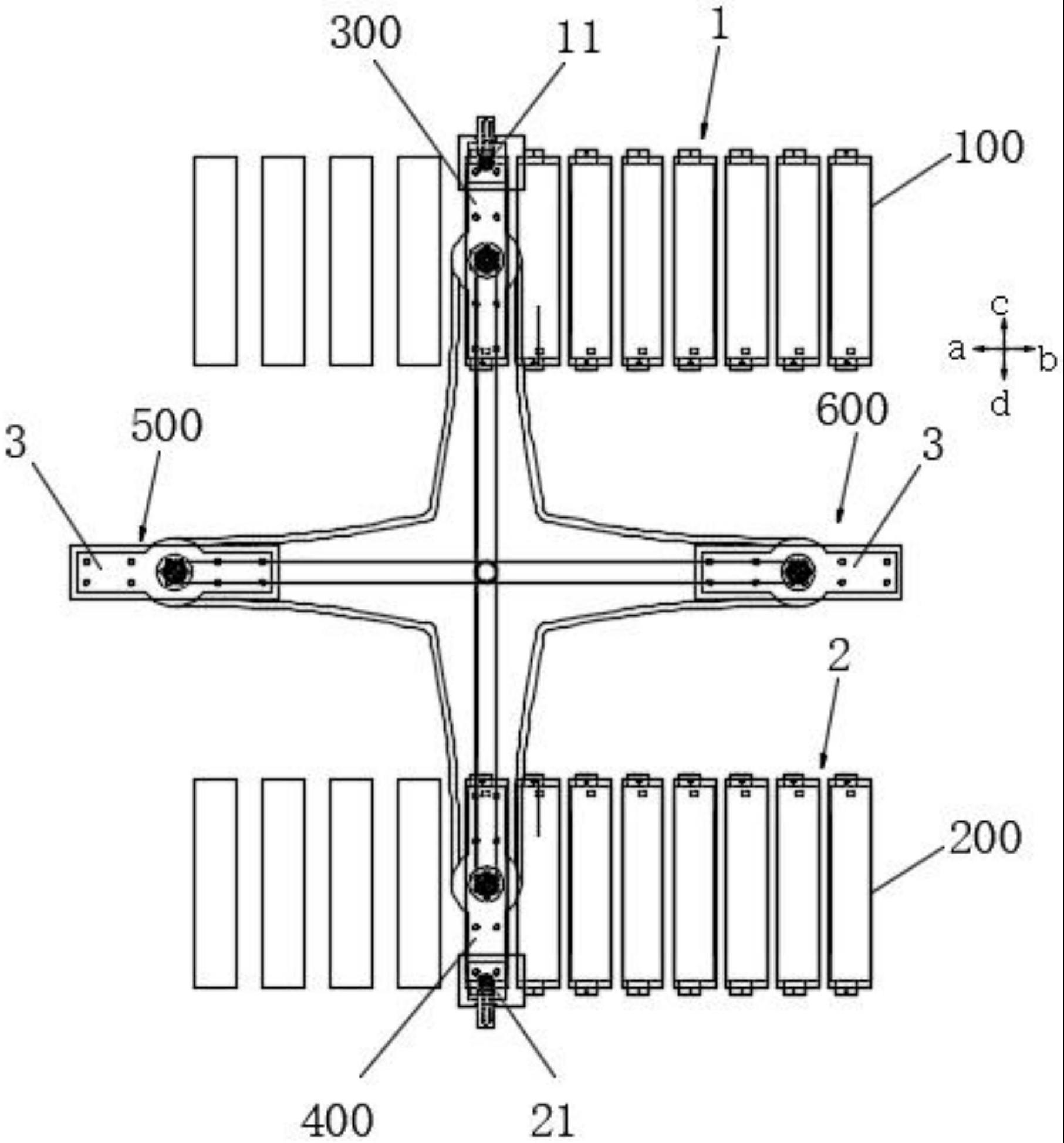
19、本实用新型提供了一种叠片机,包括正极输送机构、负极输送机构、两个正极机械臂以及两个负极机械臂。其中,正极输送机构用于输送正极片至正极上料位置,负极输送机构用于输送负极片至负极上料位置,正极上料位置与负极上料位置沿第一方向相对设置。正极机械臂包括第一正极机械臂和第二正极机械臂,第一正极机械臂能够取正极上料位置处的正极片,并将正极片转移至第一叠片工位,第二正极机械臂能够取正极上料位置处的正极片,并将正极片转移至第二叠片工位,第一叠片工位与第二叠片工位沿第二方向相对设置,第一正极机械臂和第二正极机械臂能够交替取料。负极机械臂包括第一负极机械臂和第二负极机械臂,第一负极机械臂能够取负极上料位置处的负极片,并将负极片转移至第一叠片工位,第二负极机械臂能够取负极上料位置处的负极片,并将负极片转移至第二叠片工位,第一负极机械臂和第二负极机械臂能够交替取料,第一正极机械臂和第一负极机械臂能够交替放料,第二正极机械臂和第二负极机械臂能够交替放料。该叠片机通过四个机械臂的协调合作,即第一正极机械臂取料时,第二正极机械臂放料,同时第一负极机械臂放料,且第二负极机械臂取料,可大大提高叠片机的生产效率,缩短电芯的生产周期,从而降低生产成本。
技术特征:
1.叠片机,其特征在于,包括:
2.根据权利要求1所述的叠片机,其特征在于,还包括两个叠片平台,两个所述叠片平台分别设置在所述第一叠片工位与所述第二叠片工位处,以使所述正极片和所述负极片堆叠在两个所述叠片平台上,所述叠片平台能够沿所述第一方向、所述第二方向以及竖直方向移动。
3.根据权利要求2所述的叠片机,其特征在于,所述叠片平台为uvw对位平台。
4.根据权利要求2所述的叠片机,其特征在于,所述正极输送机构还包括正极检测设备,所述正极检测设备设置在所述正极上料位置,以测量所述正极上料位置处的所述正极片的偏移量,所述正极检测设备与两个所述叠片平台均通讯连接。
5.根据权利要求2所述的叠片机,其特征在于,所述负极输送机构还包括负极检测设备,所述负极检测设备设置在所述负极上料位置,以测量所述负极上料位置处的所述负极片的偏移量,所述负极检测设备与两个所述叠片平台均通讯连接。
6.根据权利要求1所述的叠片机,其特征在于,还包括两组叠片平台,两组所述叠片平台分别设置在所述第一叠片工位与所述第二叠片工位处,每组所述叠片平台包括n个所述叠片平台,每个所述叠片平台均用于堆叠所述正极片和所述负极片,每个所述叠片平台均能够沿所述第一方向、所述第二方向以及竖直方向移动,n为大于等于2的正整数。
7.根据权利要求6所述的叠片机,其特征在于,所述第一正极机械臂、所述第二正极机械臂、所述第一负极机械臂以及第二负极机械臂均配置有n个机械手,以一次取n个所述正极片或所述负极片,并分别放置在n个所述叠片平台上。
8.根据权利要求1-7任一项所述的叠片机,其特征在于,所述正极输送机构和/或所述负极输送机构为磁悬浮输送线。
9.根据权利要求1-7任一项所述的叠片机,其特征在于,所述正极输送机构的输送方向与所述负极输送机构的输送方向平行。
10.根据权利要求1-7任一项所述的叠片机,其特征在于,所述正极上料位置的中心点与所述负极上料位置的中心点之间的距离为a,所述第一叠片工位的中心点与所述第二叠片工位的中心点之间的距离为b,满足a=b;
技术总结
本技术涉及电池技术领域,尤其涉及一种叠片机,包括正极输送机构、负极输送机构、两个正极机械臂以及两个负极机械臂。正极输送机构用于输送正极片至正极上料位置,负极输送机构用于输送负极片至负极上料位置。第一正极机械臂取正极上料位置处的正极片并转移至第一叠片工位,第二正极机械臂取正极上料位置处的正极片并转移至第二叠片工位,第一正极机械臂和第二正极机械臂交替取料。第一负极机械臂取负极上料位置处的负极片并转移至第一叠片工位,第二负极机械臂取负极上料位置处的负极片并转移至第二叠片工位,第一负极机械臂和第二负极机械臂交替取料,第一正极机械臂和第一负极机械臂交替放料,第二正极机械臂和第二负极机械臂交替放料。
技术研发人员:请求不公布姓名
受保护的技术使用者:蜂巢能源科技股份有限公司
技术研发日:20221228
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!