一种用于机器人携能通信的柔性超表面集成天线
本发明属于通信设施,尤其涉及一种用于机器人携能通信的柔性超表面集成天线。
背景技术:
1、当前绿色、智能通信的需求,以及无线信息技术的深入渗透,多智能体要求协同工作,并应用于机器人等各个领域。近年来,波士顿双足机器人atlas跑酷视频备受关注,引起了人们对机器人新设计方法的探究热潮。然而,通常机器人受自带电池容量限制,其持续工作时间一般为1到2小时,复杂运动需联合各机械结构,需要解决供能以及多驱动器协同工作的问题。其中携能通信(swipt)技术引起了研究者们的注意,其概念最早于2008年提出,主要采用携能通信天线进行同时的空间电磁能量收集以及无线通信,包含多种设计类型。
2、使用天线传能,存在天线表面积与传能功率之间的矛盾。在这种情况下,设计包裹于机器人机械表面的柔性超表面天线成为选择。就传能来说,主要分为感应式和磁耦合谐振式的无线传能,其在消费级电子产品与汽车无线充电领域应用较多,其中的微波传能面临难以实现中远距离的传能,以及传能效率问题。要实现高效、实用的无线传能以及通信,需要探索天线与应用环境的共存关系,以及兼顾系统效率、复杂度、成本等,一般希望所使用的swipt天线是宽角度接收、极化自由/不敏感。
技术实现思路
1、本发明实施例的目的在于提供一种用于机器人携能通信的柔性超表面集成天线,旨在解决上述背景技术中所提出的技术问题。
2、为实现上述目的,本发明通过集成超表面及贴片天线结构,设计了一种用于机器人携能通信的柔性超表面集成天线。
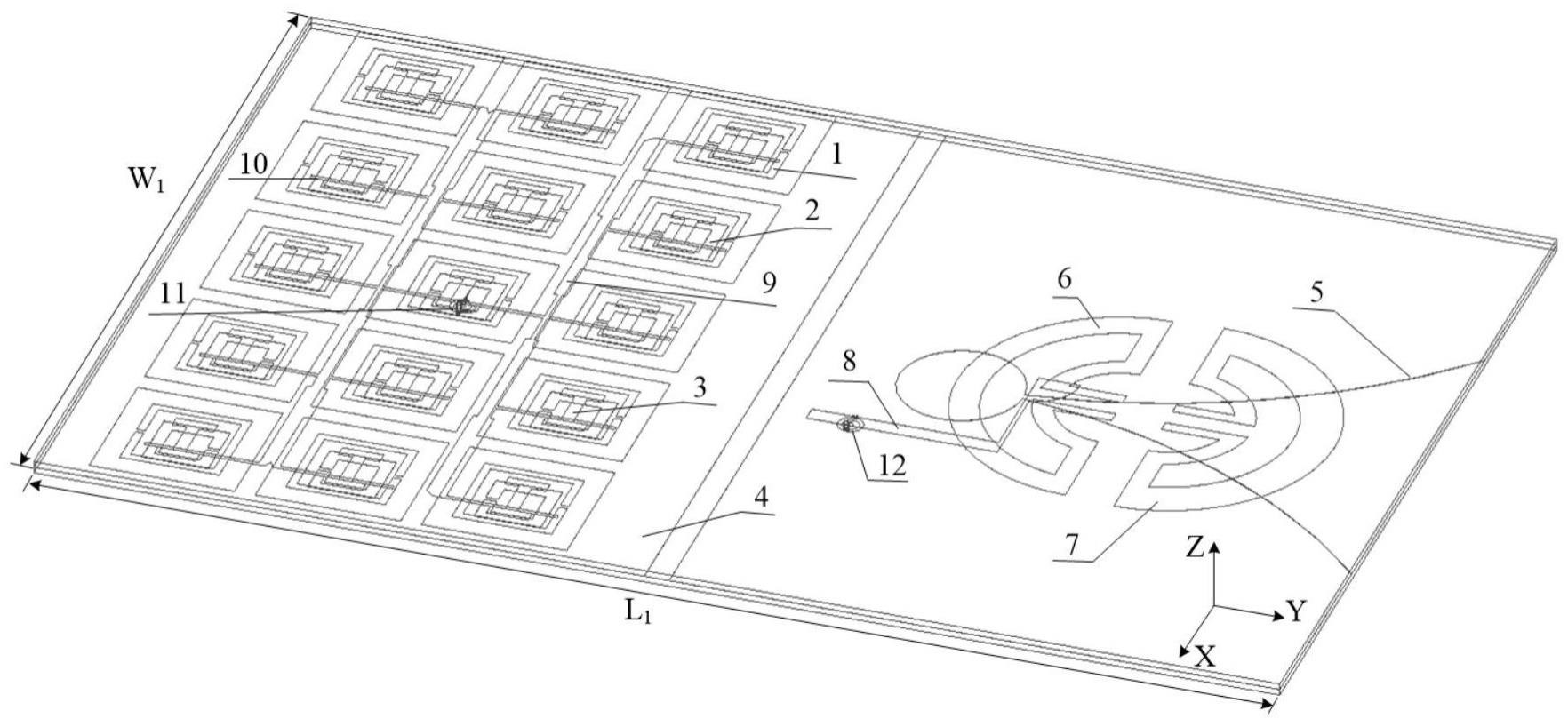
3、本发明实施例是这样实现的,一种用于机器人携能通信的柔性超表面集成天线,该超表面集成天线采用两端口及相应馈电网络,一个端口对应电磁能量收集,采用超表面结构;另一端口对应边射、端射通信,工作于不同频带;超表面单元联合层叠互补开口环槽、工形槽结构;端射通信借用vivaldi辐射结构,边射依据大、小折叠半圆形开口环结构;柔性超表面集成天线覆于机器人机械部件表面,通过天线两输入端口、分别进行无线能量收集与通信。
4、进一步的,所述超表面单元的层叠互补开口环槽上开口环槽位于顶层、下开口环槽位于中间层地板,工形槽位于上开口环槽内,互补开口环槽中心对准,工形槽、上开口环槽中心对准,下开口环槽宽度大于上开口环槽宽度。
5、进一步的,所述超表面结构的馈电网络采用阶梯形合路器、条形微带馈线结构,条形馈线延伸至上开口环开口处;
6、进一步的,所述两馈电端口采用sma接口,其内导体连接底层馈线,外导体穿过柔性基板连接中间层金属结构。
7、进一步的,所述无线通信功能的边射辐射结构的大、小两个半圆形折叠开口环谐振器面对面放置在顶层,它们的两平行直条带对准vivaldi结构的两辐射槽中心线,而位于辐射槽较窄缝隙附近。
8、进一步的,无线通信功能的边射、端射辐射结构共用位于底面的馈电结构,其采用探针底馈联合微带线,分两个支路,一个支路激励vivaldi,另一支路呈开路状态。
9、进一步的,所述柔性天线介质基板采用pdms、polyimide材料。
10、进一步的,所述柔性超表面天线覆于机器人的机械表面,如手臂、足、腿臂、腰部,每个驱动器对应于一个带有柔性超表面集成天线进行供能及无线通信。
11、与现有技术相比,本发明的有益效果在于:第一,本发明所设计的柔性超表面集成天线,采用两端口、多频带工作方式以及双层结构,将多功能集成于紧凑的天线结构中,其柔性基板结构便于共形设计。第二,本发明利用设计的一种柔性超表面集成天线,用于机器人携能通信设计,可以进行同时的电磁能量收集以及宽角度范围的无线通信,广泛收集当前的环境中的电磁能量,进行绿色通信、协同控制。
技术特征:
1.一种用于机器人携能通信的柔性超表面集成天线,其特征在于:
2.根据权利要求1所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,所述超表面单元的层叠互补开口环槽上开口环槽位于顶层、下开口环槽位于中间层地板,工形槽位于上开口环槽内,互补开口环槽中心对准,工形槽、上开口环槽中心对准,下开口环槽宽度大于上开口环槽宽度。
3.根据权利要求2所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,所述超表面结构的馈电网络采用阶梯形合路器、条形微带馈线结构,条形馈线延伸至上开口环开口处。
4.根据权利要求3所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,馈电端口采用sma接口,其内导体连接底层馈线,外导体穿过柔性基板连接中间层金属结构。
5.根据权利要求4所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,所述无线通信功能的边射辐射结构的大、小两个半圆形折叠开口环谐振器面对面放置在顶层,它们的两平行直条带对准vivaldi结构的两辐射槽中心线。
6.根据权利要求5所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,无线通信功能的边射、端射辐射结构共用位于底面的馈电结构,其采用探针底馈联合微带线,分两个支路,一个支路激励vivaldi,另一支路呈开路状态。
7.根据权利要求6所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,所述柔性天线介质基板采用pdms、polyimide材料。
8.根据权利要求7所述的用于机器人携能通信的柔性超表面集成天线,其特征在于,所述柔性超表面天线覆于机器人的机械表面,所述机器人的机械表面可以是手臂、足、腿臂、腰部,每个驱动器对应于一个带有柔性超表面集成天线进行供能及无线通信。
技术总结
本发明公开了一种用于机器人携能通信的柔性超表面集成天线,该柔性超表面集成天线兼具无线能量收集及通信功能,为双层柔性衬底结构,其带有两个输入端口,一个端口用于无线能量收集,另一端口用于不同频带的边射和端射无线通信。无线能量收集借助超表面天线,其超表面单元,顶层采用开口环槽及工形槽联合结构,中间层为嵌入互补开口环槽的地板,底层为兼馈电、合路功能的馈电网络;无线通信天线端射采用Vivaldi结构,位于中间层,边射为受Vivaldi近场耦合激励的置于顶层的面对面放置的两半圆形折叠开口环,其位于Vivaldi两辐射臂中轴上方。所述柔性超表面集成天线覆于机器人手、足臂、腰等机械部件表面,用于各驱动器的供能与通信控制。
技术研发人员:郭李,张璐,李俊峰,肖益三
受保护的技术使用者:湘潭大学
技术研发日:
技术公布日:2024/1/14
- 还没有人留言评论。精彩留言会获得点赞!