四边定位抓取机构的制作方法
本发明涉及封装定位领域,更具体地说,它涉及四边定位抓取机构。
背景技术:
1、2.5d封装和3d封装是两种常用的晶圆级多层堆叠技术。
2、热学管理是2.5d/3d封装中的重要问题之一,其原因在于:多功能芯片的堆叠使单位面积上的总功耗增大,产生的热量增高,且无有效的散热通道;晶圆减薄后会导致芯片发生热量聚集,产生过热点。2.5d/3d封装的散热可以从封装级热设计和外部散热措施两方面来考虑。
3、外部散热措施会增加系统的复杂性,但是可以极大地提高系统的散热能力。目前工业上采取的方法是在芯片或晶圆上增加热管理微通道,可以使流体在微通道中流通,提高散热效率。并在流体通道周围设置密封环,将流体与电互连隔绝开来。在刻蚀tsv通孔后,会刻蚀出比tsv浅的流体微通道,晶圆减薄后,tsv中的金属会露出,但流体微通道仍保持密闭。
4、但对于晶圆级多层堆叠技术,现有的定位抓取机构在抓取过程中只能通过多次夹持单层芯片框架相互配合,由于定位精度和移动精度有偏差,多层tsv的通孔常常对应不上,容易对后续多层晶圆键合产生影响。
技术实现思路
1、本发明提供四边定位抓取机构,解决相关技术中定位抓取机构在抓取过程中,由于移动精度的影响,多层tsv的通孔常常对应不上的技术问题。
2、本发明提供了四边定位抓取机构,包括机架和可竖向运动的吸盘,机架上安装有定位架,定位架的下方安装有第一夹爪和第二夹爪,第一夹爪和第二夹爪均设有相对的两个,用于夹持引线框架的四边,引线框架的内部放置有晶圆,引线框架包括倒置框架和下框架,倒置框架和下框架公母配合,晶圆包括上层晶圆和底层晶圆,且上层晶圆和底层晶圆分别设于倒置框架和下框架的内部,上层晶圆和底层晶圆相靠近的表面均涂覆有粘附剂,倒置框架和下框架的内部均设有限位机构,用于限制上层晶圆和底层晶圆在倒置框架和下框架内的位置,限位机构的一侧设有触发机构,用于解除限位机构底层晶圆的限制,吸盘上移顶动底层晶圆,使底层晶圆与上层晶圆预键合。
3、在一个优选的实施方式中,倒置框架和下框架的内部均设有阶梯槽,阶梯槽与限位机构配合将晶圆的上下两侧夹住,限制晶圆在引线框架内的位置。
4、在一个优选的实施方式中,限位机构包括轴体,轴体嵌装于阶梯槽内,轴体的轴壁上通过扭簧转动连接有竖杆,竖杆远离阶梯槽的一端安装有横杆,且横杆用于限制晶圆远离阶梯槽的一侧。
5、在一个优选的实施方式中,轴体的轴壁上安装有齿轮,齿轮与竖杆固定连接,触发机构包括可上下往复移动的触发齿条,触发齿条与齿轮啮合传动,触发齿条驱动齿轮旋转,带动竖杆和横杆绕轴体转动,解除横杆对晶圆的限制。
6、在一个优选的实施方式中,竖杆远离横杆的端部转动连接有导轮,当横杆解除对晶圆的限制后,横杆的端部和导轮之间的连线竖直,且横杆的端部和导轮与晶圆左右侧接触。
7、在一个优选的实施方式中,定位架上安装有四个导杆,导杆通过弹簧上套装有滑套,四个滑套分别与两个第一夹爪以及两个第二夹爪连接,定位架上还安装有伸缩缸,伸缩缸的输出端连接有凸台,第一夹爪和第二夹爪的内侧均安装有滚轮,滚轮与凸台的外侧接触,当凸台竖向运动时,滚轮受到挤压,带动第一夹爪和第二夹爪向内收缩或向外展开。
8、在一个优选的实施方式中,滑套上安装有限位柱,当凸台位于极限高位时,限位柱与定位架抵触,限制第一夹爪和第二夹爪合拢的距离。
9、在一个优选的实施方式中,机架上安装有z轴驱动单元,z轴驱动单元的输出端与定位架连接,用于驱动定位架沿z轴运动。
10、在一个优选的实施方式中,四边定位抓取机构还包括y轴驱动单元,y轴驱动单元的输出端与机架连接,用于驱动机架沿y轴运动。
11、在一个优选的实施方式中,四边定位抓取机构还包括x轴驱动单元,x轴驱动单元的输出端与y轴驱动单元连接,用于驱动y轴驱动单元和机架沿x轴运动。
12、本发明的有益效果在于:
13、本发明通过先将引线框架定位对齐后,再对底层晶圆和上层晶圆进行预键合,能够有效地保证底层晶圆和上层晶圆之间的tsv通道对齐,从而提高底层晶圆和上层晶圆之间的封装的定位精度,保证tsv电互连畅通。
14、本发明的限位机构通过切换状态,使底层晶圆在上移的过程中,能够一直对晶圆的四边进行定位限制,从而解决了底层晶圆在涂覆流体粘附剂后,底层晶圆和上层晶圆在键合过程中会水平滑动,造成tsv偏移的技术问题,进一步提高了在预键合过程中两个晶圆的定位精度。
技术特征:
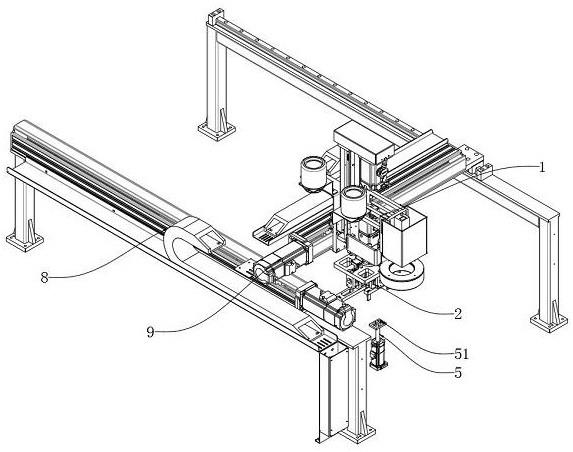
1.四边定位抓取机构,其特征在于,包括机架(1)和可竖向运动的吸盘(51),所述机架(1)上安装有定位架(2),所述定位架(2)的下方安装有第一夹爪(23)和第二夹爪(24),所述第一夹爪(23)和第二夹爪(24)均设有相对的两个,用于夹持引线框架的四边,引线框架的内部放置有晶圆,引线框架包括倒置框架(3)和下框架(4),所述倒置框架(3)和下框架(4)公母配合,晶圆包括上层晶圆和底层晶圆,且上层晶圆和底层晶圆分别设于所述倒置框架(3)和下框架(4)的内部,上层晶圆和底层晶圆相靠近的表面均涂覆有粘附剂,所述倒置框架(3)和下框架(4)的内部均设有限位机构(6),用于限制上层晶圆和底层晶圆在所述倒置框架(3)和下框架(4)内的位置,所述限位机构(6)的一侧设有触发机构,用于解除所述限位机构(6)底层晶圆的限制,所述吸盘(51)上移顶动底层晶圆,使底层晶圆与上层晶圆预键合。
2.根据权利要求1所述的四边定位抓取机构,其特征在于,所述倒置框架(3)和下框架(4)的内部均设有阶梯槽(41),阶梯槽(41)与限位机构(6)配合将晶圆的上下两侧夹住,限制晶圆在引线框架内的位置。
3.根据权利要求2所述的四边定位抓取机构,其特征在于,所述限位机构(6)包括轴体(61),所述轴体(61)嵌装于阶梯槽(41)内,所述轴体(61)的轴壁上通过扭簧转动连接有竖杆(62),所述竖杆(62)远离阶梯槽(41)的一端安装有横杆(63),且所述横杆(63)用于限制晶圆远离阶梯槽(41)的一侧。
4.根据权利要求3所述的四边定位抓取机构,其特征在于,所述轴体(61)的轴壁上安装有齿轮(64),所述齿轮(64)与竖杆(62)固定连接,所述触发机构包括可上下往复移动的触发齿条(7),所述触发齿条(7)与齿轮(64)啮合传动,所述触发齿条(7)驱动齿轮(64)旋转,带动所述竖杆(62)和横杆(63)绕轴体(61)转动,解除所述横杆(63)对晶圆的限制。
5.根据权利要求4所述的四边定位抓取机构,其特征在于,所述竖杆(62)远离横杆(63)的端部转动连接有导轮(65),当所述横杆(63)解除对晶圆的限制后,所述横杆(63)的端部和所述导轮(65)之间的连线竖直,且所述横杆(63)的端部和所述导轮(65)与晶圆左右侧接触。
6.根据权利要求5所述的四边定位抓取机构,其特征在于,所述定位架(2)上安装有四个导杆(22),所述导杆(22)上通过弹簧套装有滑套(26),四个所述滑套(26)分别与两个第一夹爪(23)以及两个第二夹爪(24)连接,所述定位架(2)上还安装有伸缩缸(21),所述伸缩缸(21)的输出端连接有凸台(211),所述第一夹爪(23)和第二夹爪(24)的内侧均安装有滚轮(25),所述滚轮(25)与凸台(211)的外侧接触,当所述凸台(211)竖向运动时,所述滚轮(25)受到挤压,带动第一夹爪(23)和第二夹爪(24)向内收缩或向外展开。
7.根据权利要求6所述的四边定位抓取机构,其特征在于,所述滑套(26)上安装有限位柱(27),当所述凸台(211)位于极限高位时,所述限位柱(27)与定位架(2)抵触,限制第一夹爪(23)和第二夹爪(24)合拢的距离。
8.根据权利要求7所述的四边定位抓取机构,其特征在于,所述机架(1)上安装有z轴驱动单元(11),所述z轴驱动单元(11)的输出端与定位架(2)连接,用于驱动定位架(2)沿z轴运动。
9.根据权利要求8所述的四边定位抓取机构,其特征在于,四边定位抓取机构还包括y轴驱动单元(9),所述y轴驱动单元(9)的输出端与机架(1)连接,用于驱动机架(1)沿y轴运动。
10.根据权利要求9所述的四边定位抓取机构,其特征在于,四边定位抓取机构还包括x轴驱动单元(8),所述x轴驱动单元(8)的输出端与y轴驱动单元(9)连接,用于驱动y轴驱动单元(9)和机架(1)沿x轴运动。
技术总结
本发明涉及封装定位技术领域,公开了四边定位抓取机构,包括机架和可竖向运动的吸盘,机架上安装有定位架,定位架的下方安装有第一夹爪和第二夹爪,用于夹持引线框架的四边,引线框架的内部放置有晶圆,引线框架包括倒置框架和下框架,倒置框架和下框架公母配合,晶圆包括上层晶圆和底层晶圆,且上层晶圆和底层晶圆分别设于倒置框架和下框架的内部,上层晶圆和底层晶圆相靠近的表面均涂覆有粘附剂;本发明通过先将引线框架定位对齐后,再对底层晶圆和上层晶圆进行预键合,能够有效地保证底层晶圆和上层晶圆之间的TSV通道对齐,从而提高底层晶圆和上层晶圆之间的封装的定位精度,保证TSV电互连畅通。
技术研发人员:陈皓,王辅兵,罗长江,邹流生
受保护的技术使用者:苏州赛肯智能科技有限公司
技术研发日:
技术公布日:2024/1/13
- 还没有人留言评论。精彩留言会获得点赞!