水下机器人线缆连接用分离式光电复合接头的制作方法
本发明涉及水下机器人线缆,具体而言涉及一种水下机器人线缆连接用分离式光电复合接头。
背景技术:
1、水下机器人以及水下机器人配套设施是多种现代高技术及其系统集成的产物,对于我国海洋经济、海洋产业、海洋开发和海洋高科技具有特殊的重要意义。水下机器人在执行水下任务时利用光电复合线缆为其提供能源及通讯信息。线缆与水下机器人之间一般通过光电复合接头进行连接。
2、因线缆长度较长,容易与水下障碍物发生缠绕、打结,从而影响水下机器人正常工作,常规水下光电复合接头安装紧密在出现缠绕、打结时不能自动分离,因此只能采用切断线缆的方式达到线缆脱困的目的,但是这种方式会导致线缆内部进水而无法使用。
3、因此,亟需水下机器人线缆连接用分离式光电复合接头能够在遇到障碍物缠绕、打结时能够自动分离的光电复合接头。
技术实现思路
1、本发明目的在于针对现有技术的缺陷,提供一种水下机器人线缆连接用分离式光电复合接头,包括:
2、光电接头母头,尾端与线缆连接,首端开设有针孔;
3、光电接头公头,尾端与线缆连接,首端开设有插接孔,所述插接孔包裹在光电接头母头上;
4、所述光电接头公头上设置有插针,当光电接头公头的插接孔包裹在光电接头母头上,所述插针插入所述针孔内,使光电接头公头与光电接头母头实现对接;
5、其中,所述光电接头公头首端设有弹压结构,所述光电接头母头首端设置有凸出所述针孔外缘的顶压结构,当所述光电接头公头与所述光电接头母头对接时,所述顶压结构插入至安装槽内并沿线缆长度方向挤压所述弹压结构,使光电接头公头内部预留将所述光电接头母头向所述弹压结构反方向顶出的压力。
6、进一步的,所述光电接头公头首端开设有安装槽,所述安装槽截面为圆形,所述弹压结构包括压缩弹簧,所述压缩弹簧被设置在所述安装槽内。
7、进一步的,所述顶压结构包括凸出所述针孔外缘的圆形凸起,所述圆形凸起的外径与所述安装槽的内径相匹配,以使所述圆形凸起可在光电接头对接时插入所述安装槽内挤压所述压缩弹簧。
8、进一步的,所述光电接头母头上设置有用于平衡光电接头内部与外部水压的水压平衡结构,所述水压平衡结构包括沿所述光电接头母头径向方向由外壁向内延伸至所述光电接头母头前端面的间隙,当所述光电接头公头与所述光电接头母头在所述压缩弹簧的压力作用下分离时,所述间隙暴露在外部。
9、进一步的,所述光电接头母头上设置有密封件,所述密封件包括第一密封圈和第二密封圈,所述第一密封圈与所述第二密封圈分设在所述水压平衡结构的两侧。
10、进一步的,所述光电接头母头上开设有两个环形凹槽,两个所述环形凹槽分设在所述水压平衡结构的两侧,用于安装所述第一密封圈与所述第二密封圈。
11、进一步的,所述第一密封圈与所述第二密封圈均被设置成截面为o形。
12、进一步的,所述光电接头公头的首端外缘设置有微型倒孔。
13、进一步的,所述光电接头公头上设置有限位结构,所述限位结构包括可拆卸安装在所述光电接头公头上的轴套,所述轴套靠近所述光电接头母头的端部呈轴对称分布设置有多个凸出所述轴套外壁的支耳,所述支耳上开设有轴孔。
14、进一步的,还包括与所述限位结构相配合的外部结构,所述外部结构包括套设在所述光电接头母头上的壳体,所述壳体靠近所述光电接头公头的一端设有销轴,当所述光电接头公头与所述光电接头母头对接时,所述销轴能插入所述轴孔内与所述轴孔实现过盈配合。
15、与现有技术相比,本发明的优点在于:
16、在光电接头公头上与光电接头母头上设置相对应的顶压结构和压缩弹簧,使光电接头对接后内部预留一定压力,在失去限位结构的固定后,通过压缩弹簧的弹压力自动分离光电接头,并在光电接头母头上设置水压平衡结构,使光电接头在压缩弹簧的作用力下分离后,露出水压平衡结构,使海水从水压平衡结构进入光电接头母头和光电接头公头之间,平衡光电接头内部和外部的水压,使光电接头母头与光电接头公头更容易分离。
技术特征:
1.一种水下机器人线缆连接用分离式光电复合接头,其特征在于,包括:
2.根据权利要求1所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头公头(20)首端开设有安装槽(202),所述安装槽(202)截面为圆形,所述弹压结构(22)包括压缩弹簧,所述压缩弹簧被设置在所述安装槽(202)内。
3.根据权利要求2所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述顶压结构(11)包括凸出所述针孔(101)外缘的圆形凸起,所述圆形凸起的外径与所述安装槽(202)的内径相匹配,以使所述圆形凸起可在光电接头对接时插入所述安装槽(202)内挤压所述压缩弹簧。
4.根据权利要求3所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头母头(10)上设置有用于平衡光电接头内部与外部水压的水压平衡结构(30),所述水压平衡结构(30)包括沿所述光电接头母头(10)径向方向由外壁向内延伸至所述光电接头母头(10)前端面的间隙,当所述光电接头公头(20)与所述光电接头母头(10)在所述压缩弹簧的压力作用下分离时,所述间隙暴露在外部。
5.根据权利要求4所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头母头(10)上设置有密封件(40),所述密封件(40)包括第一密封圈和第二密封圈,所述第一密封圈与所述第二密封圈分设在所述水压平衡结构(30)的两侧。
6.根据权利要求5所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头母头(10)上开设有两个环形凹槽(102),两个所述环形凹槽(102)分设在所述水压平衡结构(30)的两侧,用于安装所述第一密封圈与所述第二密封圈。
7.根据权利要求5所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述第一密封圈与所述第二密封圈均被设置成截面为o形。
8.根据权利要求1-7中的任意一项所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头公头(20)的首端外缘设置有微型倒孔(203)。
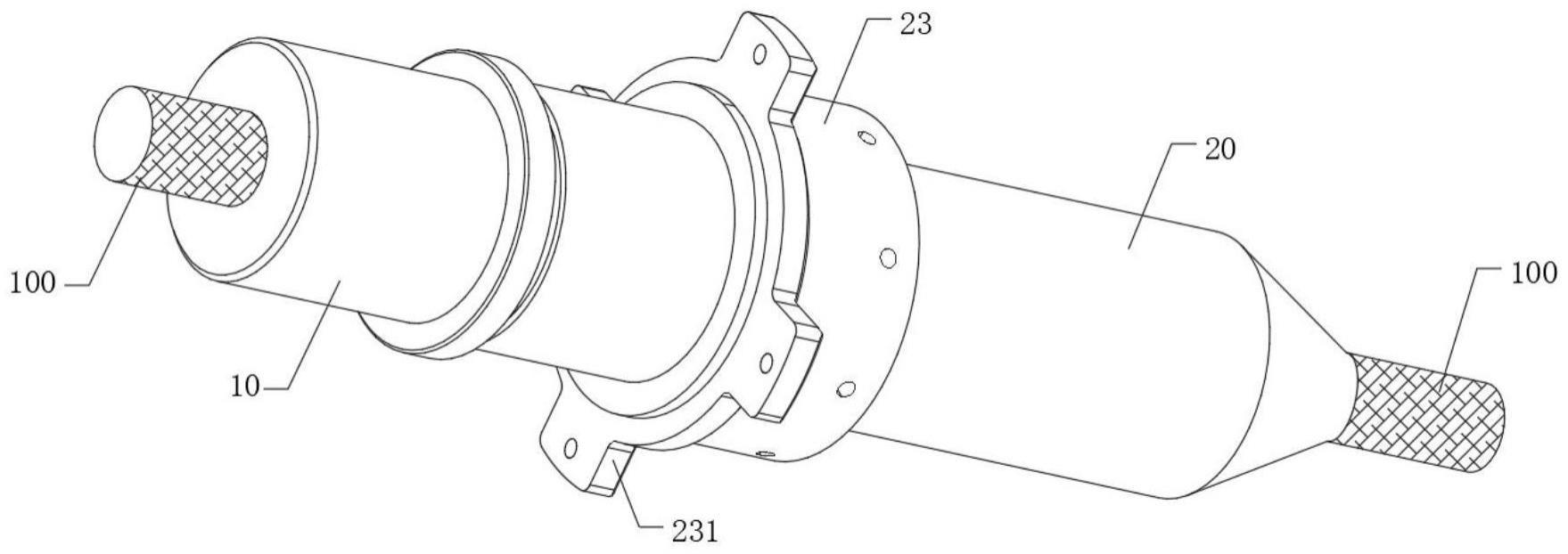
9.根据权利要求8所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,所述光电接头公头(20)上设置有限位结构(23),所述限位结构(23)包括可拆卸安装在所述光电接头公头(20)上的轴套,所述轴套靠近所述光电接头母头(10)的端部呈轴对称分布设置有多个凸出所述轴套外壁的支耳(231),所述支耳(231)上开设有轴孔(2311)。
10.根据权利要求9所述的水下机器人线缆连接用分离式光电复合接头,其特征在于,还包括与所述限位结构(23)相配合的外部结构,所述外部结构包括套设在所述光电接头母头(10)上的壳体,所述壳体靠近所述光电接头公头(20)的一端设有销轴,当所述光电接头公头(20)与所述光电接头母头(10)对接时,所述销轴能插入所述轴孔(2311)内与所述轴孔(2311)实现过盈配合。
技术总结
本发明提供一种水下机器人线缆连接用分离式光电复合接头,包括光电接头母头和光电接头公头;所述光电接头公头上设置有插针,当光电接头公头的插接孔包裹在光电接头母头上,所述插针插入所述针孔内,使光电接头公头与光电接头母头实现对接;在光电接头公头上与光电接头母头上设置相对应的顶压结构和压缩弹簧,使光电接头对接后内部预留一定压力,并在光电接头母头上设置水压平衡结构,使光电接头在压缩弹簧的作用力下分离后,露出水压平衡结构,使海水从水压平衡结构进入光电接头母头和光电接头公头之间,平衡光电接头内部和外部的水压,使光电接头母头与光电接头公头更容易分离。
技术研发人员:王文辉,叶复萌,李乐卿,贺儒飞,马一鸣,李建秋,李尧,曹禹
受保护的技术使用者:南方电网调峰调频发电有限公司储能科研院
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!