一种用于半导体晶圆运输系统的智能化末端执行器结构的制作方法
本发明涉及机械制造的,具体涉及一种用于半导体晶圆运输系统的智能化末端执行器结构。
背景技术:
1、目前半导体行业内洁净机器人对常温晶圆的搬送主要以采用夹持式、真空吸附式和被动摩擦式,其中夹持式晶圆搬运末端执行器,可以实现晶圆的对中,晶圆运输中不会发送滑动等问题,但是由于存在一定的夹持力,不适合较薄的晶圆;真空吸附式晶圆搬运末端执行器,搬运效率较高,但是容易在晶圆吸附处产生吸痕;被动摩擦式晶圆搬运末端执行器,无额外附加力在晶圆上,不会对晶圆造成损伤,但是依靠与晶圆接触部分的摩擦力传输晶圆,不适用与较快的传输速度。
2、常规使用的末端执行器,均采用三种搬送方式中的一种,在面对多种晶圆传输需求的时候,需要更换对应的末端执行器并重新进行调试,操作繁琐,工作效率低,无法通过快速切换,实现多种规格晶圆共用传输。
技术实现思路
1、本发明提供了一种用于半导体晶圆运输系统的智能化末端执行器结构,解决了现有末端执行器仅能执行专门一种晶圆的传输,无法通过快速切换,实现多种规格晶圆共用传输等技术问题。
2、本发明可通过以下技术方案实现:
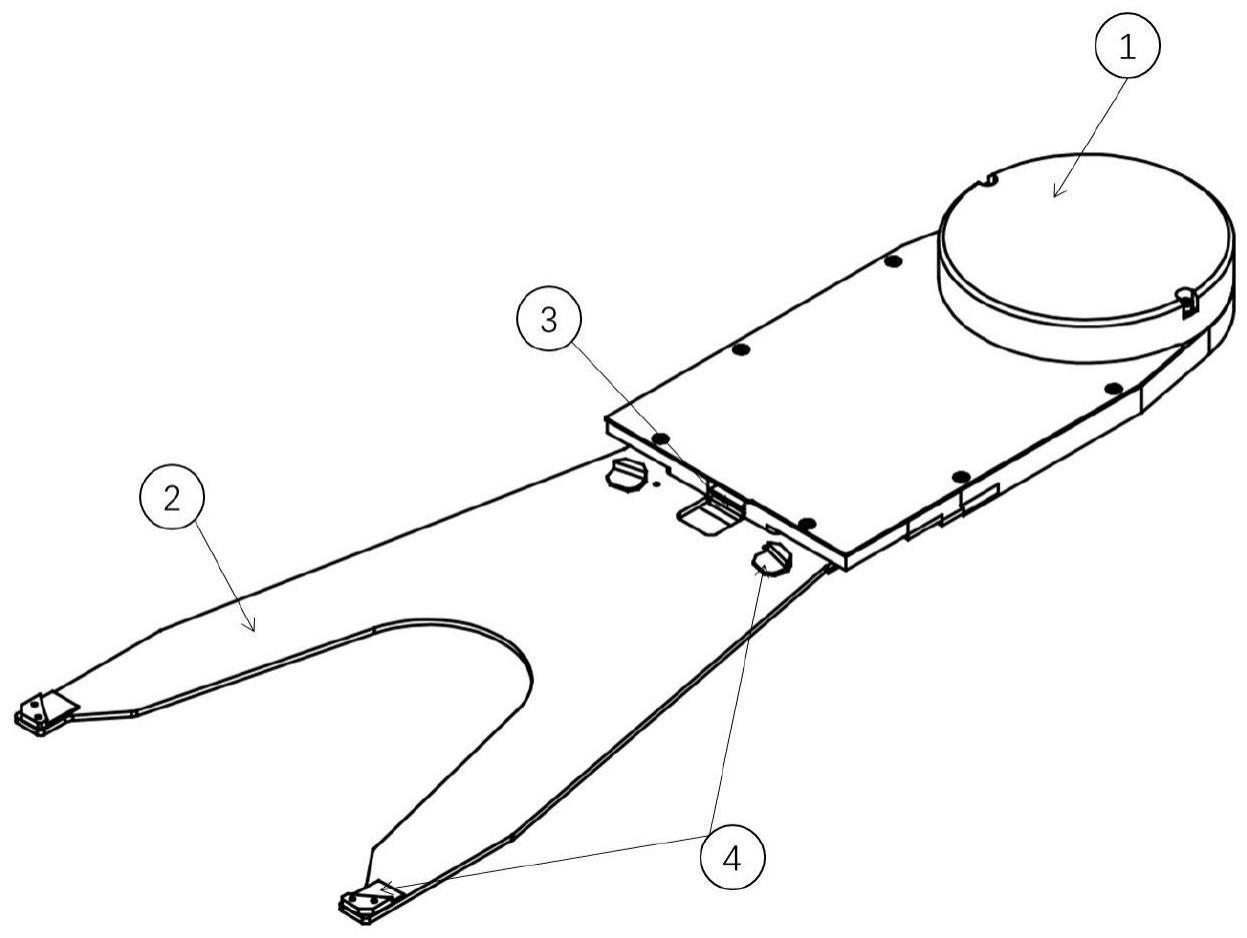
3、一种用于半导体晶圆运输系统的智能化末端执行器结构,包括设置在晶圆搬运机器人的机械臂末端的承载平板,所述承载平板用于承载晶圆,在其周边位置设置有多个台阶状的仿生被动增磨垫,在其靠近机械臂末端的一端设置有夹爪,所述夹爪用于通过伸缩实现晶圆夹持,
4、所述夹爪的驱动器与处理器相连,所述处理器用于接收上位机的晶圆选型信息,通过驱动器控制夹爪是否伸出,以参与晶圆夹持。
5、进一步,所述承载平板呈y形结构,多个所述仿生被动增磨垫分列在y形结构的三个端部位置,
6、所述夹爪采用杆状结构,其轴向中心线过晶圆的圆心,其输出端与晶圆配合,输入端与驱动器相连,所述驱动器采用气动驱动或者电动驱动。
7、进一步,所述仿生被动增磨垫的台阶面均朝向承载平板的中心设置,且呈弧形结构。
8、本发明有益的技术效果在于:
9、本发明的智能化末端执行器能够应用于传输多种规格晶圆的搬运设备,可自动实现两种传输方式的切换。
10、对于吸附痕迹要求不高,传输速率要求较高的工艺,采用夹持方式传输晶圆,同时存在仿生被动增磨垫的辅助作用,更有利于传输速率的提升,同时夹持方式还可以实现对晶圆的对中定心功能,因此对于标准厚度的晶圆或者无notch晶圆进行对中需求时,也采用夹持方式传输晶圆;对于较薄的晶圆,晶圆强度较低,使用夹持方式的末端执行器容易将晶圆夹碎,此时可以采用被动摩擦方式即仿生被动增磨垫传输晶圆,但夹爪并不起作用,实现两种传输方式共存于一个末端执行器上,满足多种规格晶圆传输需求的快速切换。
11、另外,整个装置结构简单,维护难度低,便于推广应用。
技术特征:
1.一种用于半导体晶圆运输系统的智能化末端执行器结构,其特征在于:包括设置在晶圆搬运机器人的机械臂末端的承载平板,所述承载平板用于承载晶圆,在其周边位置设置有多个台阶状的仿生被动增磨垫,在其靠近机械臂末端的一端设置有夹爪,所述夹爪用于通过伸缩实现晶圆夹持,
2.根据权利要求1所述的用于半导体晶圆运输系统的智能化末端执行器结构,其特征在于:所述承载平板呈y形结构,多个所述仿生被动增磨垫分列在y形结构的三个端部位置,
3.根据权利要求2所述的用于半导体晶圆运输系统的智能化末端执行器结构,其特征在于:所述仿生被动增磨垫的台阶面均朝向承载平板的中心设置,且呈弧形结构。
技术总结
本发明涉及机械制造的技术领域,公开了一种用于半导体晶圆运输系统的智能化末端执行器结构,包括设置在晶圆搬运机器人的机械臂末端的承载平板,所述承载平板用于承载晶圆,在其周边位置设置有多个台阶状的仿生被动增磨垫,在其靠近机械臂末端的一端设置有夹爪,所述夹爪用于通过伸缩实现晶圆夹持,所述夹爪的驱动器与处理器相连,所述处理器用于接收上位机的晶圆选型信息,通过驱动器控制夹爪是否伸出,以参与晶圆夹持。整个装置结构简单,组装简单,维护难度低,便于推广应用。
技术研发人员:董怀宝,武一鸣,刘恩龙,马刚,刘锐,苗义,张菊,董阳,李莹莹,卜天瑜,张艺怀,王俊波
受保护的技术使用者:上海广川科技有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!