晶圆预对准控制方法与流程
本发明涉及集成电路制造设备领域,尤其涉及一种晶圆预对准控制方法。
背景技术:
1、晶圆传输系统是ic制造流程中的重要环节,其中,晶圆预对准系统保证了晶圆传输系统的传输精度,晶圆预对准技术主要包括晶圆中心位置校准和缺口角度位置对准两个方面,通过晶圆的中心位置和缺口角度信息,可以计算出晶圆相对于平台中心的笛卡尔坐标系下xy的偏移量以及偏移角度,后续根据偏移量和偏移角度来完成晶圆传输系统中的调节工序。
2、公开号为cn1787200a的中国专利公开了硅晶圆预对准控制方法,该专利采用基于圆拟合的预对准算法,具有定位精度高的特点,该专利为保证采样数据均匀分布于圆周上,预对准过程中会多旋转一些角度,在匀速旋转过程中进行数据采样,缺口定位部分先初定位缺口,再旋转至初定位位置进行缺口细采样,最终通过最小二乘法进行缺口识别,该专利通过初定位和细采样方式进行缺口识别,细采样过程会额外增加晶圆预对准的时间;数据采样需要保证旋转机构匀速运动后再进行采样,这样操作一方面会导致会增加预对准时间,另一方面因采集卡和运动性能的影响,采样实际值和理想位置可能会出现偏差。
3、因此,有必要提供一种晶圆预对准控制方法以解决现有技术中存在的上述问题。
技术实现思路
1、本发明的目的在于提供一种晶圆预对准控制方法,以解决现有技术中晶圆预对准耗时长的问题。
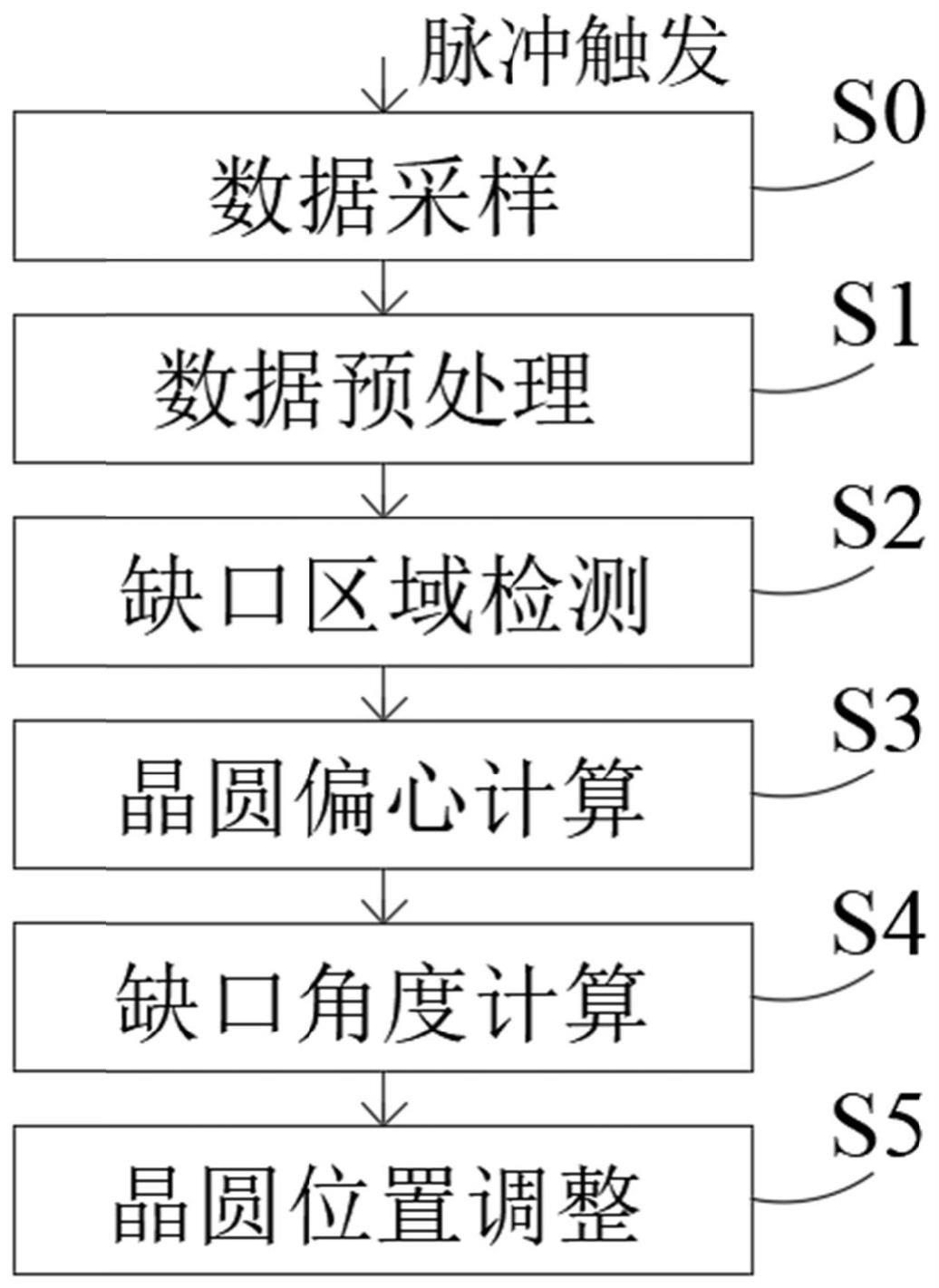
2、为实现上述目的,本发明提供了一种晶圆预对准控制方法,包括以下步骤:
3、数据采样:通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据,所述边缘数据记为数据采集点;
4、数据预处理:对所述数据采集点进行过滤处理以去除异常的数据采集点得到正常数据采集点,将所述正常数据采集点的数据距离值通过坐标转换,计算出所述正常数据采集点的坐标值;
5、缺口区域检测:通过计算相邻三点的夹角以识别所述边缘数据的变化率以得到缺口区域的数据采集点;
6、晶圆偏心计算:所述正常数据采集点去除所述缺口区域的数据采集点以得到第一计算数据采集点,将所述第一计算数据采集点的数据距离值通过坐标转换计算得到第一计算坐标值,所述第一计算坐标值通过最小二乘法进行圆拟合以求得晶圆的第一半径和第一圆心坐标;
7、缺口角度计算:对所述缺口区域的数据采集点进行筛选处理以得到第二计算数据采集点,将所述第二计算数据采集点的数据距离值通过坐标转换计算得到第二计算坐标值,所述第二计算坐标值使用最小二乘法计算出所述缺口区域的第二半径和第一中心坐标,将所述第二半径和所述第一中心坐标作为缺口拟合的先验位置信息,之后使用lm拟合迭代算法计算所述缺口区域的第三半径和第二中心坐标;
8、晶圆位置调整:根据所述晶圆的圆心坐标和所述缺口区域的中心坐标计算得到所述缺口区域在坐标系下的角度,对所述晶圆的圆心和所述缺口区域的角度进行相应的调整。
9、本发明所述的晶圆预对准控制方法的有益效果在于:通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据,去除预对准设备运动性能和/或启动加减速对数据采样的影响,提高数据采样的精度和效率;通过使用最小二乘法计算出所述缺口区域的第二半径和第一中心坐标作为先验位置信息,之后使用lm拟合迭代算法计算所述缺口区域的第三半径和第二中心坐标,从而实现对缺口区域的第二计算数据采集点的拟合,提高了所述缺口区域识别的精度。本发明解决了现有技术中晶圆预对准耗时长的问题。
10、可选的,所述第二计算数据采集点到所述缺口区域的中心的距离为第二距离,所述第二距离减去所述第三半径的值接近为0时,所述lm拟合迭代算法结束计算。其有益效果在于:提高了缺口区域的第三半径和第二中心坐标的计算精度。
11、可选的,所述第一计算数据采集点到所述第一圆心的距离为第一距离,若所述第一距离减去所述第一半径大于给定阈值,则所述第一计算数据采集点为异常点,将所述异常点进行过滤处理后得到第三计算数据采集点,将所述第三计算数据采集点的数据距离值通过坐标转换计算得到第三计算坐标值,所述第三计算坐标值通过最小二乘法进行圆拟合以求得晶圆的第四半径和第二圆心坐标。其有益效果在于:提高了晶圆的第四半径和第二圆心坐标的计算精度。
12、可选的,所述数据采样的步骤还包括预对准设备收到预对准指令后带动晶圆旋转,数据采集卡通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据,所述边缘数据记为数据采集点。
13、可选的,所述数据采集卡通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据的步骤还包括:一个码盘位置对应的脉冲会对应锁存一个所述数据采集点。其有益效果在于:能够保证采集到的数据的稳定性,降低预对准设备运动对采集到的数据的影响。
14、可选的,所述异常的数据采集点包括传感器噪声对应的数据采集点和发生跳变的数据采集点。其有益效果在于:提高了数据采集点的精度。
15、可选的,所述缺口区域的数据采集点是以固定间隔采集得到的。
16、可选的,所述对所述晶圆的圆心和所述缺口区域的角度进行相应的调整的步骤包括:先调整所述晶圆的圆心位置,然后调整所述缺口区域的角度。
技术特征:
1.一种晶圆预对准控制方法,其特征在于,包括以下步骤:
2.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述第二计算数据采集点到所述缺口区域的中心的距离为第二距离,所述第二距离减去所述第三半径的值接近为0时,所述lm拟合迭代算法结束计算。
3.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述第一计算数据采集点到所述第一圆心的距离为第一距离,若所述第一距离减去所述第一半径大于给定阈值,则所述第一计算数据采集点为异常点,将所述异常点进行过滤处理后得到第三计算数据采集点,将所述第三计算数据采集点的数据距离值通过坐标转换计算得到第三计算坐标值,所述第三计算坐标值通过最小二乘法进行圆拟合以求得晶圆的第四半径和第二圆心坐标。
4.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述数据采样的步骤还包括预对准设备收到预对准指令后带动晶圆旋转,数据采集卡通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据,所述边缘数据记为数据采集点。
5.根据权利要求4所述的晶圆预对准控制方法,其特征在于,所述数据采集卡通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据的步骤还包括:一个码盘位置对应的脉冲会对应锁存一个所述数据采集点。
6.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述异常的数据采集点包括传感器噪声对应的数据采集点和发生跳变的数据采集点。
7.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述缺口区域的数据采集点是以固定间隔采集得到的。
8.根据权利要求1所述的晶圆预对准控制方法,其特征在于,所述对所述晶圆的圆心和所述缺口区域的角度进行相应的调整的步骤包括:先调整所述晶圆的圆心位置,然后调整所述缺口区域的角度。
技术总结
本发明提供了一种晶圆预对准控制方法,包括以下步骤:数据采样;数据预处理;缺口区域检测;晶圆偏心计算;缺口角度计算;晶圆位置调整,通过脉冲触发方式获取所述晶圆旋转过程中的边缘数据,去除预对准设备运动性能和/或启动加减速对数据采样的影响,提高数据采样的精度和效率;通过使用最小二乘法计算出所述缺口区域的第二半径和第一中心坐标作为先验位置信息,之后使用LM拟合迭代算法计算所述缺口区域的第三半径和第二中心坐标,从而实现对缺口区域的第二计算数据采集点的拟合,提高了所述缺口区域识别的精度。本发明解决了现有技术中晶圆预对准耗时长的问题。
技术研发人员:朱玉东,何海龙,高路为,莫涵
受保护的技术使用者:中科芯微智能装备(沈阳)有限公司
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!