一种用于自动调整地质雷达天线姿态的装置
本发明属于煤炭智能开采领域,尤其涉及一种用于自动调整地质雷达天线姿态的装置。
背景技术:
1、矿井地质雷达智能探测与识别是实现煤矿智能化开采所面临的一个关键技术难题。矿井下环境复杂,目前开发的矿用雷达天线技术可以应用于矿井地质异常、煤岩界面等信息探测识别,但是在应用中仍然面临着一个难题:煤矿巷道煤层顶板起伏变化,固定在采煤机上部的雷达天线距离顶板距离也随之发生变化,距离过大则会直接影响雷达回波信号的质量,距离过小则会直接影响装置的安全,甚至在接触顶板的情况下直接导致装置损坏。因此,在井下开采作业过程中,如何实现雷达天线装置随顶板起伏而上下自动调节和精确控制,增加数据采集的准确性,是矿井地质雷达智能探测与识别所亟待解决的问题。
2、当前的方法主要是通过将雷达天线放置在天线保护壳中,来防止雷达天线被损坏,但天线保护壳又会对天线的收发信号造成很大影响,降低信号的传输效率和准确性。
3、因此,预期一种能够在对雷达天线进行防护的同时,提高信号的传输效率和准确性的装置。
技术实现思路
1、本发明的目的是提供一个雷达天线自动升降装置及其控制方法,其主要作用有:针对雷达天线在井下探测过程,由于顶板界面的起伏导致固定在采煤机上部的雷达天线距离顶板距离也随之发生变化,进而影响数据采集的难题,研发雷达天线自动升降装置及其控制方法,自动实时对雷达天线的位置进行调节,同时使用高强度非金属材料保护雷达天线和步进电机组件,避免其在开采作业过程中发生碰撞损坏;也避免保护外壳对雷达天线的探测效果产生干扰。
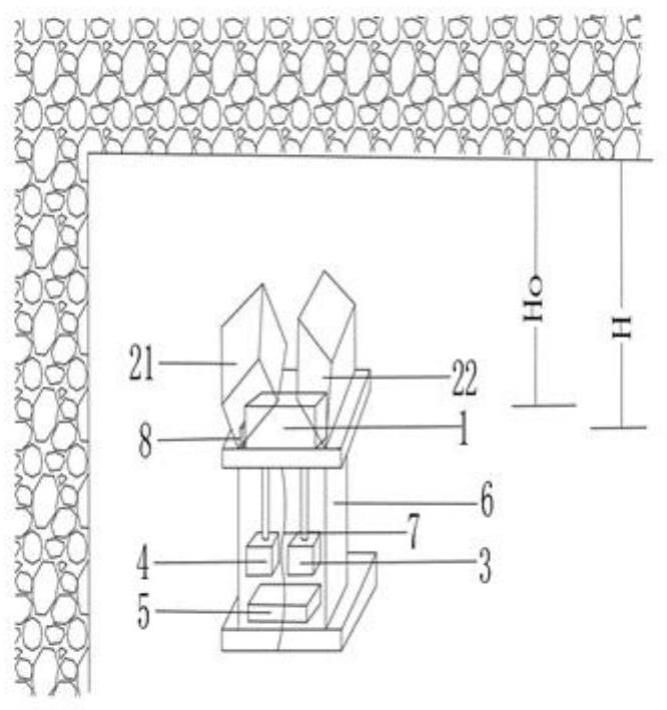
2、为实现上述目的,本发明提供了如下方案:本发明提供一种天线端智能升降控制装置,该装置包括:雷达天线1、天线保护壳2、第一丝杠步进电机3、第二丝杠步进电机4、步进电机控制盒5、步进电机保护壳6、电源线7和传感器8。
3、优选地,所述的雷达天线1,内部装有具有采集程序的采集卡、带有接收机的接收天线和带有发射机的发射天线,配合雷达天线采集系统使用,其作用一是实现在对雷达天线采集起止控制和采集参数的设置;二是实时自动追踪探测表面,计算处理层位信息,结合雷达天线探测有效距离,计算获得丝杠步进电机需要的伸缩量,并将计算处理结果发送给步进电机控制盒。
4、优选地,所述的天线保护壳2,形状为梯形箱体,内部可以容纳雷达天线的同时,固定雷达天线的位置保证雷达天线在采集过程中辐射方向不会发生改变。此外,所述的天线保护壳2的顶面优选为斜面,,从而能够在探测过程中能有效的减少上方煤块或粉尘的堆积,进而降低散落的煤岩块对采集数据的干扰。进一步而言,保护壳材料为非金属材料聚乙烯材料,保护天线的同时不会影响天线的探测效果。
5、优选地,所述的第一丝杠步进电机3,其作用是控制第一天线保护壳21和第二天线保护壳22的闭合和打开。
6、优选地,所述的第二丝杠步进电机4,其行程变化范围为403m,通过电机正传反转实现控制雷达天线的上升和下降。
7、优选地,所述的步进电机控制盒5,其作用一是同步控制多个步进电机,保证雷达天线上升下降过程中不会发生倾斜;二是与雷达天线采集系统实现数据传输,利用雷达天线采集系统给出的数据处理结果,控制电机的转向和转速。
8、优选地,所述的步进电机保护壳6,其形状为长方体箱体,材料为金属材料,通过焊接国定在采煤机顶部,底部开口可以通过电源线。其作用是保护内部的丝杠步进电机和步进电机控制盒。
9、优选地,所述的电源线7,其作用一是给上部的雷达天线和丝杠步进电机提供电源,二是连接雷达天线和采煤机,实现数据对接和远程控制。其外部需要安装必要的保护壳。
10、优选地,所述的传感器8,其作用是感知雷达天线周围环境,当雷达天线周围发生危险状况时,向第一丝杠步进电机3传输指令,用以控制第一天线保护壳21和第二天线保护壳22的打开。当雷达天线周围危险消除时,向第一丝杠步进电机3传输指令,用以控制第一天线保护壳21和第二天线保护壳22的闭合。
11、所述装置可以实现雷达天线1随顶板高度的变化而自动调节升降状态,确保雷达天线1与顶板煤层保持设定的距离h,增加采集数据的准确性。
12、所述装置在采集中对采集的每一道雷达数据都做上述处理,从而实现雷达天线1随顶板高度的变化而自动调节升降状态,增加采集数据的准确性。
13、所述装置能够在对雷达天线进行防护的同时,提高信号的传输效率和准确性的装置。
技术特征:
1.一种用于自动调整雷达天线姿态的装置,其特征在于:所述装置包括雷达天线1、天线保护壳2、第一丝杠步进电机3、第二丝杠步进电机4、步进电机控制盒5、步进电机保护壳6、电源线7和传感器8,其中天线保护壳2包括第一天线保护壳21和第二天线保护壳22,第一天线保护壳21和第二天线保护壳22能够自动打开和闭合。
2.根据权利要求1所述的装置,其特征在于:第一丝杠步进电机3和传感器8放置于天线保护壳2中,第一丝杠步进电机3用于控制第一天线保护壳21和第二天线保护壳22的打开和闭合,传感器8用于感知所述雷达天线1的周围环境,并向第一丝杠步进电机3发送控制指令。
3.根据权利要求2所述的装置,其特征在于:传感器8在感知到雷达天线1周围发生危险状况时,向第一丝杠步进电机3传输指令,用以控制第一天线保护壳21和第二天线保护壳22闭合。
4.根据权利要求2所述的装置,其特征在于:传感器8在感知到雷达天线1周围发生危险状况消除时,向第一丝杠步进电机3传输指令,用以控制第一天线保护壳21的主体和第二天线保护壳22的主体打开。
5.根据权利要求1所述的装置,其特征在于:雷达天线1放置于天线保护壳2中,第二丝杠步进电机4和步进电机控制盒5放置于步进电机保护壳6中,天线保护壳2固定安装在第二丝杠步进电机4的丝杠顶端,步进电机保护壳6固定在采煤机顶端。
6.根据权利要求1所述的装置,其特征在于:所述天线保护壳2上表面为斜面,用于避免在所述装置工作过程中掉落的煤岩块在天线保护壳2堆积。
7.根据权利要求1所述的装置,其特征在于:所述雷达天线1还能够获取空气与煤层界面信息,从而计算出雷达天线1距离顶板煤层的距离h0,h0和设定的距离h的差值δ=h0-h,该δ输入到步进电机控制盒5中,作为第二丝杠步进电机4的控制信号量。
8.根据权利要求7所述的装置,其特征在于:所述雷达天线1距离顶板煤层的距离h0的计算方法为:
9.根据权利要求8所述的装置,其特征在于:当δ=0时,所述第二丝杠步进电机4不工作;当δ>0时,所述第二丝杠步进电机4正转,雷达天线1上升,直至δ=0结束;当δ<0时,所述第二丝杠步进电机4反转,雷达天线1下降,直至δ=0结束。
10.根据权利要求4所述的装置,其特征在于:传感器8在感知到雷达天线1周围发生危险状况消除时,向第一丝杠步进电机3传输指令,用以控制第一天线保护壳21的顶板和第二天线保护壳22的顶板打开。
技术总结
本公开涉及一种用于自动调整雷达天线姿态的装置。所述装置包括雷达天线1、天线保护壳2、第一丝杠步进电机3、第二丝杠步进电机4、步进电机控制盒5、步进电机保护壳6、电源线7和传感器8,其中天线保护壳2包括第一天线保护壳21和第二天线保护壳22,第一天线保护壳21和第二天线保护壳22能够自动打开和闭合。根据本公开的装置能够实现雷达天线1随顶板高度的变化而自动调节升降状态,确保雷达天线1与顶板煤层保持设定的距离H,增加采集数据的准确性,同时能够时时感知雷达天线1周围的环境变化,从而在感知到危险情况时控制第一天线保护壳21和第二天线保护壳22打开或闭合,以在不影响天线信号的情况下实现对雷达天线1的有效保护。
技术研发人员:马子钧,赫云兰,谯寅初,赵禹深,王玺凯,李可新
受保护的技术使用者:中国矿业大学(北京)
技术研发日:
技术公布日:2024/1/15
- 还没有人留言评论。精彩留言会获得点赞!