一种搬运晶圆机械手装置的制作方法
本发明涉及半导体制造,尤其涉及一种搬运晶圆机械手装置。
背景技术:
1、相关技术中搬运晶圆的方法一般有两种:1.机械手通过真空吸附搬运晶圆表面;2.机械手搬运贴附晶圆介质的晶圆。然而,随着半导体行业的蓬勃发展,晶圆上的电路变得越来越复杂,这也导致晶圆变得更薄、更脆。因此,在搬运晶圆的过程中,碎裂的风险也就相应增加。此外,晶圆还会添加定向缺口来标识其晶向,如n型、p型和晶向类型(110型、111型等)。这些缺口会降低晶圆的强度,增加了搬运的难度。
2、针对晶圆易碎裂的特点,搬运晶圆时要减小晶圆的径向压力和轴向压力,其中轴向压力是晶圆碎裂得首要原因。相关技术中,首先,在机械手通过真空吸附搬运晶圆表面时,需要校订真空吸附区域,避免吸附在晶圆的定向缺口区域。这样可以减少对晶圆弱点的力的集中,降低碎裂的风险。其次,在搬运晶圆时,可以采用更加精确的方法,确保机械手与晶圆的接触面积最小化,以减少对晶圆的机械应力。可见,通过改进常规搬运方法,如校订真空吸附区域和减少机械应力,可以降低晶圆碎裂的风险,确保搬运过程的安全性和可靠性,但是,需要预先进行晶圆缺口等特征进行识别,以确保精确控制,增加了时间成本,而且,不可避免的,具有一定的识别出错率。
技术实现思路
1、本发明要解决的技术问题是如何克服上述搬运晶圆机械手装置所存在的缺陷,为此,本发明提供一种高效快捷、保护晶圆不易破碎的搬运晶圆机械手装置。
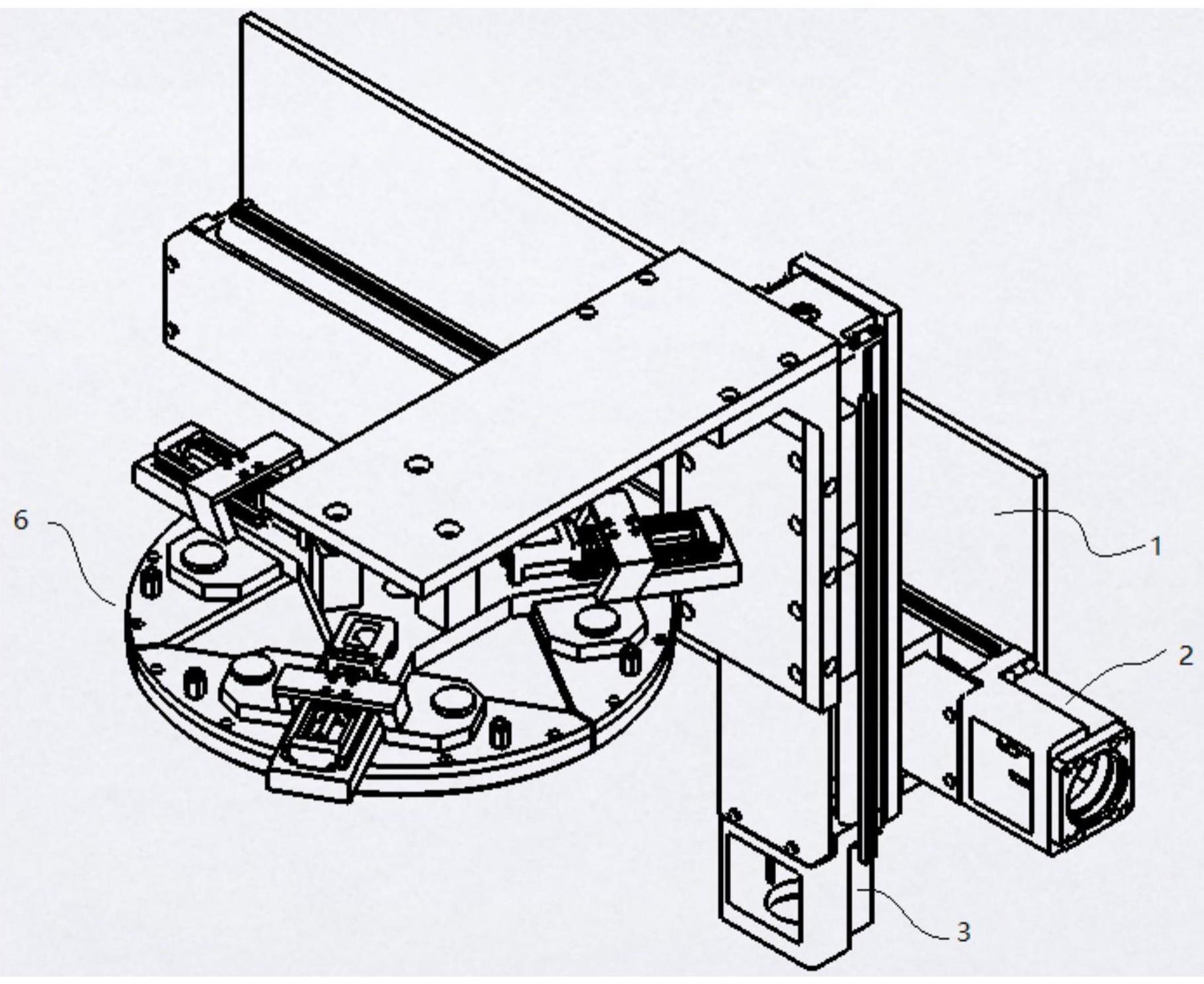
2、本发明为解决所述技术问题的搬运晶圆机械手装置包括晶圆卡具模组以及用于晶圆卡具模组水平位移和竖直位移的位移模组;其中,所述晶圆卡具模组用于形成晶圆的支撑力。
3、作为上述搬运晶圆机械手装置的改进,所述晶圆卡具模组通过将晶圆包围在一定空间的方式进行搬运。
4、作为上述搬运晶圆机械手装置的改进,所述晶圆卡具模组包括可开合的卡具和用于控制卡具开合动作的开合模组;所述卡具设置有用于包围晶圆的空间结构。
5、作为上述搬运晶圆机械手装置的改进,所述卡具包括可开合的用于容纳晶圆的槽。
6、作为上述搬运晶圆机械手装置的改进,所述槽的数量为至少一个。
7、作为上述搬运晶圆机械手装置的改进,所述卡具包括可开合的扇形件,所述扇形件能够组成圆形结构,所述扇形件边部设置有用于容纳晶圆的弧形槽。
8、作为上述搬运晶圆机械手装置的改进,所述卡具包括可开合的矩形件,所述矩形件能够组成矩形结构,所述矩形件边部设置有用于容纳晶圆的矩形槽。
9、作为上述搬运晶圆机械手装置的改进,所述开合模组包括用于推带动所述卡具做直线往复运动的动力装置。
10、作为上述搬运晶圆机械手装置的改进,还包括用于调平晶圆卡具模组的调平机构。
11、作为上述搬运晶圆机械手装置的改进,所述位移模组包括用于晶圆卡具模组水平位移的水平搬运模组,所述水平搬运模组固定上固定连接有用于晶圆卡具模组竖直位移的竖直搬运模组,所述竖直搬运模组与所述晶圆卡具模组固定连接。
12、与相关技术相比,本发明通过将晶圆包围在一定空间的方式进行搬运,由于将晶圆完全包裹在环形槽内,晶圆缺口无论是何种类型,都能被全部包裹,兼容性更强;节省了识别晶圆缺口的工艺步骤,可节省识别时间及出错成本,并且使晶圆只受到轴向支撑力,去除了其他外界影响因素,减少了晶圆的碎裂几率;有效提高了晶圆搬运的位置精度及运动平稳性。
技术特征:
1.一种搬运晶圆机械手装置,用于晶圆搬运,其特征在于,包括:
2.根据权利要求1所述的搬运晶圆机械手装置,其特征在于,所述晶圆卡具模组通过将晶圆包围在一定空间的方式进行搬运。
3.根据权利要求2所述的搬运晶圆机械手装置,其特征在于,所述晶圆卡具模组包括可开合的卡具和用于控制卡具开合动作的开合模组;所述卡具设置有用于包围晶圆的空间结构。
4.根据权利要求3所述的搬运晶圆机械手装置,其特征在于,所述卡具包括可开合的用于容纳晶圆的槽。
5.根据权利要求4所述的搬运晶圆机械手装置,其特征在于,所述槽的数量为至少一个。
6.根据权利要求3所述的搬运晶圆机械手装置,其特征在于,所述卡具包括可开合的扇形件,所述扇形件能够组成圆形结构,所述扇形件边部设置有用于容纳晶圆的弧形槽。
7.根据权利要求1至8任一项所述的搬运晶圆机械手装置,其特征在于,还包括用于调平晶圆卡具模组的调平机构。
8.根据权利要求1所述的搬运晶圆机械手装置,其特征在于,所述位移模组包括用于驱动所述晶圆卡具模组水平位移的水平搬运模组,所述水平搬运模组固定连接有用于驱动所述晶圆卡具模组竖直位移的竖直搬运模组,所述竖直搬运模组与所述晶圆卡具模组固定连接。
9.根据权利要求1至8任一项所述的搬运晶圆机械手装置,其特征在于,还包括用于检测晶圆位置状态的晶圆检测模块。
10.根据权利要求1至8任一项所述的搬运晶圆机械手装置,其特征在于,还包括用于对晶圆表面进行去离子处理的去离子系统。
技术总结
本发明提出了一种搬运晶圆机械手装置,包括晶圆卡具模组以及用于晶圆卡具模组水平位移和竖直位移的位移模组;所述晶圆卡具模组用于形成晶圆的支撑力,将晶圆包围在一定空间的方式进行搬运,节省了识别晶圆缺口的工艺步骤的识别时间及出错成本,并且使晶圆只受到轴向支撑力,去除了其他外界影响因素,减少了晶圆的碎裂几率;有效提高了晶圆搬运的位置精度及运动平稳性。
技术研发人员:吕超,刘涛,孙彬,郝靖
受保护的技术使用者:北京中电科电子装备有限公司
技术研发日:
技术公布日:2024/1/16
- 还没有人留言评论。精彩留言会获得点赞!